Download as PDF, PPTX
![Programme for Computational Information Geometry
1. understand the dictionary of distances (similarities in IR,
kernels in ML, ...) and group them axiomatically into
exhaustive classes, propose new classes of
distances [6, 21, 18], and generic algorithms
2. understand relationships between distances and geometries
3. understand generalized cross/relative entropies and their
induced geometries and distributions (beyond
Shannon/Boltzmann/Gibbs)
4. provide coordinate-free intrinsic computing for applications
c 2015 Frank Nielsen 6](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-6-320.jpg)
![Cornerstone : Fisher information I(θ) = Variance of the
score
Amount of information that an observable random variable X
carries about an unknown parameter θ :
I(θ)[Ii,j ], Ii,j (θ) = Eθ[∂i l(x; θ)∂j l(x; θ)] , I(θ) 0
with (l; θ) = log p(x; θ), ∂i l(x; θ) = ∂
∂θi
l(x; θ). Cramèr-Rao bound
for variance of an estimator.
Important problem : When Fisher information is only positive
semi-denite, we have degenerate/singular models
c 2015 Frank Nielsen 7](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-7-320.jpg)
![Fisher Information Matrix (FIM) : Our usual test friends!
I(θ) = [Ii,j (θ)]i,j , Ii,j (θ) = Eθ[∂i l(x; θ)∂j l(x; θ)]
For multinomials (p1, ..., pd ) :
I(θ) =
p1(1 − p1) −p1p2 ... −p1pk
−p1p2 p2(1 − p2) ... −p2pk
.
.
.
.
.
.
−p1pk −p2pk ... pk(1 − pk)
For multivariate normals (MVNs) N(µ, Σ) :
Ii,j (θ) =
∂µ
∂θi
Σ−1
∂µ
∂θj
+
1
2
tr Σ−1
∂Σ
∂θi
Σ−1
∂Σ
∂θj
matrix trace : tr.
c 2015 Frank Nielsen 8](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-8-320.jpg)
![Equivalent denitions of the Fisher information matrix
Negative expectation of the Hessian of the log-likelihood
function :
Ii,j = Eθ[∂i l(θ)∂j l(θ)]
Ii,j = 4
x
∂i p(x|θ)∂j p(x|θ)dx
Ii,j = −Eθ[∂i ∂j l(θ)]
For natural exponential families p(x|θ) = exp( θ, x − F(θ)) that
are log-concave densities
I(θ) = 2
F(θ) 0
c 2015 Frank Nielsen 9](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-9-320.jpg)
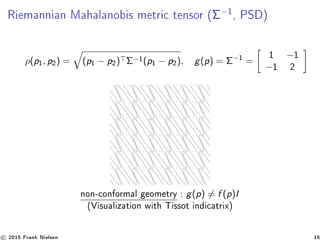
![Riemannian geometry of population spaces
Population space : H. Hotelling [5] (1930), C. R. Rao [22] (1945)
Consider (M, g) with g = I(θ). Fisher information matrix is
unique up to a constant for statistical invariance.
Geometry of multinomials is spherical (on the orthant)
For univariate location-scale families, hyperbolic geometry or
Euclidean geometry (location only)
p(x|µ, σ) =
1
σ
p0
x − µ
σ
, X = µ + σX0
(Normal, Cauchy, Laplace, t-Student, etc.)
⇒ Studying computational hyperbolic geometry is important !
(also for computer graphics, universal covering space)
c 2015 Frank Nielsen 12](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-12-320.jpg)
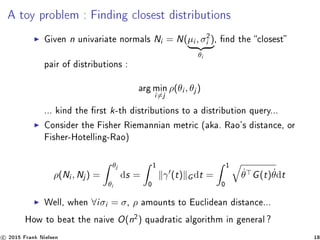
![Normal/Gaussian family and 2D location-scale families
FIM Eθ[∂i l∂j l] for univariate normal/multivariate spherical
distributions :
I(µ, σ) =
1
σ2 0
0
2
σ2
=
1
σ2
1 0
0 2
I(µ, σ) = diag 1
σ2
, ...,
1
σ2
,
2
σ2
→ amount to Poincaré metric
dx2+dy2
y2 , hyperbolic geometry in
upper half plane/space.
c 2015 Frank Nielsen 16](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-16-320.jpg)
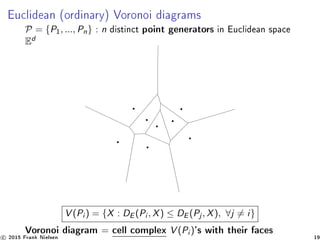
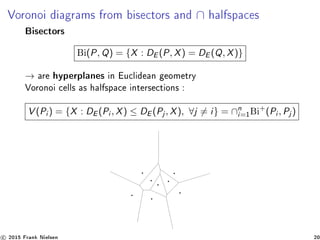
![Voronoi diagrams and dual Delaunay simplicial complex
Empty sphere property, max min angle triangulation, etc
Voronoi dual Delaunay triangulation
→ non-degenerate point set = no (d + 2) points co-spherical
Duality : Voronoi k-face ⇔ Delaunay (d − k)-simplex
Bisector Bi(P, Q) perpendicular ⊥ to segment [PQ]
c 2015 Frank Nielsen 21](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-21-320.jpg)
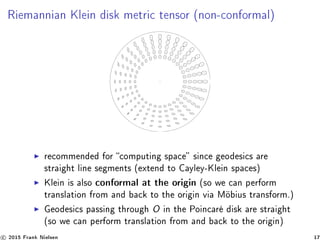
![Hyperbolic Voronoi (Klein ane) diagrams [15, 17]
Hyperbolic Voronoi diagram in Klein disk = clipped power diagram.
Power distance :
x − p 2
− wp
→ additively weighted ordinary Voronoi = ordinary CG
c 2015 Frank Nielsen 23](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-23-320.jpg)
![Hyperbolic Voronoi diagrams [15, 17]
5 common models of the abstract hyperbolic geometry
https://www.youtube.com/watch?v=i9IUzNxeH4o
(5 min. video)
ACM Symposium on Computational Geometry (SoCG'14)
c 2015 Frank Nielsen 24](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-24-320.jpg)

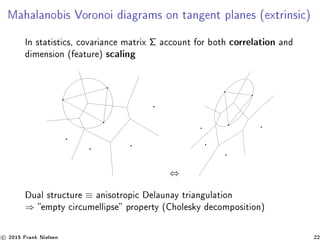
![Statistical mixtures of exponential families
Rayleigh MMs [10] for IntraVascular UltraSound (IVUS) imaging.
log p(x|θ) = t(x), θ − F(θ) + k(x)
Rayleigh distribution :
p(x; λ) = x
λ2 e− x2
2λ2
x ∈ R+
d = 1 (univariate)
D = 1 (order 1)
θ = − 1
2λ2
Θ = (−∞, 0)
F(θ) = − log(−2θ)
t(x) = x2
k(x) = log x
(Weibull k = 2)
Coronary plaques : brotic/calcied/lipidic tissues
Rayleigh Mixture Models (RMMs) : segmentation/classication
c 2015 Frank Nielsen 29](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-29-320.jpg)
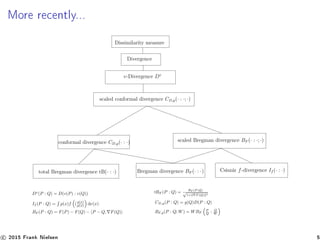
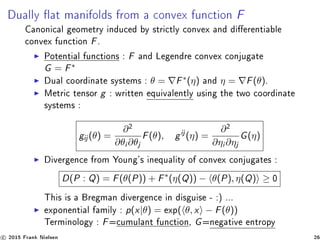
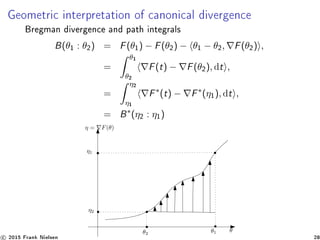
![Dual Bregman divergences canonical divergence [14]
For P and Q belonging to the same exponential families
KL(P : Q) = EP log
p(x)
q(x)
≥ 0
= BF (θQ : θP) = BF∗ (ηP : ηQ)
= F(θQ) + F∗
(ηP) − θQ, ηP
= AF (θQ : ηP) = AF∗ (ηP : θQ)
with θQ (natural parameterization) and ηP = EP[t(X)] = F(θP)
(moment parameterization).
KL(P : Q) = p(x) log
1
q(x)
dx
H×(P:Q)
− p(x) log
1
p(x)
dx
H(p)=H×(P:P)
Shannon cross-entropy and entropy of EF [14] with k(x) = 0 :
H×
(P : Q) = F(θQ) − θQ, F(θP) − EP[k(x)]
H(P) = F(θP) − θP, F(θP) − EP[k(x)]
H(P) = −F∗
(ηP) − EP[k(x)]
c 2015 Frank Nielsen 30](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-30-320.jpg)
![Closed-form : algebraic vs analytic formula
Shannon cross-entropy and entropy of exponential families [14] :
H×
(P : Q) = F(θQ) − θQ, F(θP) − EP[k(x)]
H(P) = F(θP) − θP, F(θP) − EP[k(x)]
H(P) = −F∗
(ηP) − EP[k(x)]
Poisson entropy [1](1988) :
H(Poi(λ)) = λ(1 − log λ) + e−λ
∞
k=0
λk log k!
k!
Rayleigh entropy [14] :
H(Ray(σ)) = 1 + log
σ
√
2
+
γ
2
with γ the Euler-Mascheroni constant
c 2015 Frank Nielsen 31](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-31-320.jpg)
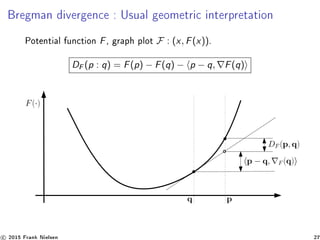
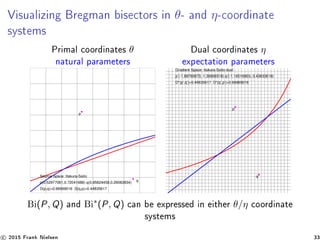
![Dual divergence/Bregman dual bisectors [3, 13, 16]
Bregman sided (reference) bisectors related by convex duality :
BiF (θ1, θ2) = {θ ∈ Θ |BF (θ : θ1) = BF (θ : θ1)}
BiF∗ (η1, η2) = {η ∈ H |BF∗ (η : η1) = BF∗ (η : η1)}
Right-sided bisector : → θ-hyperplane, η-hypersurface
HF (p, q) = {x ∈ X | BF (x : p ) = BF (x : q )}.
F(p) − F(q), x + (F(p) − F(q) + q, F(q) − p, F(p) ) = 0
Left-sided bisector : → θ-hypersurface, η-hyperplane
HF (p, q) = {x ∈ X | BF ( p : x) = BF ( q : x)}
HF : F(x), q − p + F(p) − F(q) = 0
hyperplane = autoparallel submanifold of dimension d − 1
c 2015 Frank Nielsen 32](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-32-320.jpg)
![Application of Bregman Voronoi diagrams : Closest
Bregman pair [9, 8]
Geometry of the best error exponent for multiple hypothesis testing
(MHT)
Bayesian hypothesis testing
n-ary MHT from minimum pairwise Cherno distance :
C(P1, ..., Pn) = min
i,j=i
C(Pi , Pj )
Pm
e ≤ e−mC(Pi∗ ,Pj∗ )
, (i∗
, j∗
) = argmini,j=i C(Pi , Pj )
Compute for each pair of natural neighbors [?] Pθi
and Pθj
, the
Cherno distance C(Pθi
, Pθj
), and choose the pair with minimal
distance.
→ Closest Bregman pair problem (Cherno distance fails triangle
inequality).
c 2015 Frank Nielsen 34](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-34-320.jpg)
![Application of Bregman Voronoi diagrams : Minimum
pairwise Cherno information [9, 8]
pθ1
pθ2
pθ∗
12
m-bisector
e-geodesic Ge(Pθ1
, Pθ2
)
(a) (b)
η-coordinate system
Pθ∗
12
C(θ1 : θ2) = B(θ1 : θ∗
12)
Bim(Pθ1
, Pθ2
)
Chernoff distribution between
natural neighbours
c 2015 Frank Nielsen 35](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-35-320.jpg)
![Space of Bregman spheres and Bregman balls [3]
Dual sided Bregman balls (bounding Bregman spheres) :
Ballr
F (c, r) = {x ∈ X | BF (x : c) ≤ r}
Balll
F (c, r) = {x ∈ X | BF (c : x) ≤ r}
Legendre duality :
Balll
F (c, r) = ( F)−1
(Ballr
F∗ ( F(c), r))
Illustration for Itakura-Saito divergence, F(x) = − log x
c 2015 Frank Nielsen 37](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-37-320.jpg)
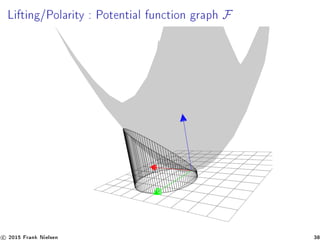
![Space of Bregman spheres : Lifting map [3]
F : x → ˆx = (x, F(x)), hypersurface in Rd+1
, potential function
Hp : Tangent hyperplane at ˆp
z = Hp(x) = x − p, F(p) + F(p)
Bregman sphere σ −→ ˆσ with supporting hyperplane
Hσ : z = x − c, F(c) + F(c) + r.
(// to Hc and shifted vertically by r)
ˆσ = F ∩ Hσ.
intersection of any hyperplane H with F projects onto X as a
Bregman sphere :
H : z = x, a +b → σ : BallF (c = ( F)−1
(a), r = a, c −F(c)+b)
c 2015 Frank Nielsen 39](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-39-320.jpg)
![Space of Bregman spheres : Algorithmic applications [3]
Vapnik-Chervonenkis dimension (VC-dim) is d + 1 for the class
of Bregman balls (for Machine Learning).
Union/intersection of Bregman d-spheres from
representational (d + 1)-polytope [3]
Radical axis of two Bregman balls is an hyperplane :
Applications to Nearest Neighbor search trees like Bregman
ball trees or Bregman vantage point trees [19].
c 2015 Frank Nielsen 40](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-40-320.jpg)
![Bregman proximity data structures [19], k-NN queries
Vantage point trees : partition space according to Bregman balls
Partitionning space with intersection of Kullback-Leibler balls
→ ecient nearest neighbour queries in information spaces
c 2015 Frank Nielsen 41](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-41-320.jpg)
![Application : Minimum Enclosing Ball [12, 20]
To a hyperplane Hσ = H(a, b) : z = a, x +b in Rd+1
, corresponds
a ball σ = Ball(c, r) in Rd with center c = F∗(a) and radius :
r = a, c −F(c)+b = a, F∗
(a) −F( F∗
(a))+b = F∗
(a) + b
since F( F∗(a)) = F∗(a), a − F∗(a) (Young equality)
SEB : Find halfspace H(a, b)− : z ≤ a, x + b that contains all
lifted points :
min
a,b
r = F∗
(a) + b,
∀i ∈ {1, ..., n}, a, xi + b − F(xi ) ≥ 0
→ Convex Program (CP) with linear inequality constraints
F(θ) = F∗(η) = 1
2
x x : CP → Quadratic Programming
(QP) [4] used in SVM. Smallest enclosing ball used as a
primitive in SVM [23]
c 2015 Frank Nielsen 42](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-42-320.jpg)
![Approximating the smallest Bregman enclosing balls [20, 11]
Algorithm 1: BBCA(P, l).
c1 ← choose randomly a point in P;
for i = 2 to l − 1 do
// farthest point from ci wrt. BF
si ← argmaxn
j=1
BF (ci : pj );
// update the center: walk on the η-segment [ci , psi ]η
ci+1 ← F−1
( F(ci )# 1
i+1
F(psi )) ;
end
// Return the SEBB approximation
return Ball(cl , rl = BF (cl : X)) ;
θ-, η-geodesic segments in dually at geometry.
c 2015 Frank Nielsen 43](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-43-320.jpg)
![Smallest enclosing balls : Core-sets [20]
Core-set C ⊆ S : SOL(S) ≤ SOL(C) ≤ (1 + )SOL(S)
extended Kullback-Leibler Itakura-Saito
c 2015 Frank Nielsen 44](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-44-320.jpg)
![Programming InSphere predicates [3]
Implicit representation of Bregman spheres/balls : consider d + 1
support points on the boundary
Is x inside the Bregman ball dened by d + 1 support points?
InSphere(x; p0, ..., pd ) =
1 ... 1 1
p0 ... pd x
F(p0) ... F(pd ) F(x)
sign of a (d + 2) × (d + 2) matrix determinant
InSphere(x; p0, ..., pd ) is negative, null or positive depending
on whether x lies inside, on, or outside σ.
c 2015 Frank Nielsen 45](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-45-320.jpg)
![Smallest enclosing ball in Riemannian manifolds [2]
c = a#M
t b : point γ(t) on the geodesic line segment [ab] wrt M
such that ρM(a, c) = t × ρM(a, b) (with ρM the metric distance on
manifold M)
Algorithm 2: GeoA
c1 ← choose randomly a point in P;
for i = 2 to l do
// farthest point from ci
si ← argmaxn
j=1
ρ(ci , pj );
// update the center: walk on the geodesic line
segment [ci , psi ]
ci+1 ← ci #M
1
i+1
psi ;
end
// Return the SEB approximation
return Ball(cl , rl = ρ(cl , P)) ;
c 2015 Frank Nielsen 46](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-46-320.jpg)
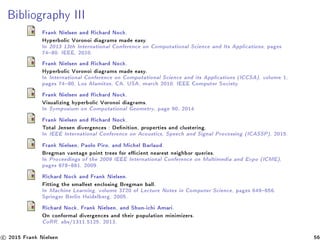
![Ali-Silvey-Csiszár f -divergences [7]
If (X1 : X2) = x1(x)f
x2(x)
x1(x)
dν(x) ≥ 0 (potentially +∞)
Name of the f -divergence Formula If (P : Q) Generator f (u) with f (1) = 0
Total variation (metric) 1
2 |p(x) − q(x)|dν(x) 1
2 |u − 1|
Squared Hellinger ( p(x) − q(x))2dν(x) (
√
u − 1)2
Pearson χ2
P
(q(x)−p(x))2
p(x)
dν(x) (u − 1)2
Neyman χ2
N
(p(x)−q(x))2
q(x)
dν(x)
(1−u)2
u
Pearson-Vajda χk
P
(q(x)−λp(x))k
pk−1(x)
dν(x) (u − 1)k
Pearson-Vajda |χ|k
P
|q(x)−λp(x)|k
pk−1(x)
dν(x) |u − 1|k
Kullback-Leibler p(x) log p(x)
q(x)
dν(x) − log u
reverse Kullback-Leibler q(x) log q(x)
p(x)
dν(x) u log u
α-divergence 4
1−α2 (1 − p
1−α
2 (x)q1+α
(x)dν(x)) 4
1−α2 (1 − u
1+α
2 )
Jensen-Shannon 1
2 (p(x) log 2p(x)
p(x)+q(x)
+ q(x) log 2q(x)
p(x)+q(x)
)dν(x) −(u + 1) log 1+u
2 + u log u
If (p : q) =
1
n
i
f (x2(si )/x1(si )), s1, ..., sn ∼iid X1(never +∞ !)
c 2015 Frank Nielsen 48](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-48-320.jpg)
![Information monotonicity of f -divergences [7]
(Proof in Ali-Silvey paper)
Do coarse binning : from d bins to k d bins :
X = k
i=1
Ai
Let pA = (pi )A with pi = j∈Ai
pj .
Information monotonicity :
D(p : q) ≥ D(pA
: qA
)
We should distinguish less downgraded histograms...
⇒ f -divergences are the only divergences preserving the
information monotonicity.
c 2015 Frank Nielsen 49](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-49-320.jpg)
![f -divergences and higher-order Vajda χk
divergences [7]
If (X1 : X2) =
∞
k=0
f (k)(1)
k!
χk
P(X1 : X2)
χk
P(X1 : X2) =
(x2(x) − x1(x))k
x1(x)k−1
dν(x),
|χ|k
P(X1 : X2) =
|x2(x) − x1(x)|k
x1(x)k−1
dν(x),
are f -divergences for the generators (u − 1)k and |u − 1|k.
When k = 1, χ1
P(X1 : X2) = (x1(x) − x2(x))dν(x) = 0
(never discriminative), and |χ1
P|(X1, X2) is twice the total
variation distance.
χk
P is a signed distance
c 2015 Frank Nielsen 50](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-50-320.jpg)
![Ane exponential families [7]
Canonical decomposition of the probability measure :
pθ(x) = exp( t(x), θ − F(θ) + k(x)),
consider natural parameter space Θ ane (like multinomials).
Poi(λ) : p(x|λ) =
λx e−λ
x!
, λ 0, x ∈ {0, 1, ...}
NorI (µ) : p(x|µ) = (2π)−d
2 e−1
2 (x−µ) (x−µ)
, µ ∈ Rd
, x ∈ Rd
Family θ Θ F(θ) k(x) t(x) ν
Poisson log λ R eθ − log x! x νc
Iso.Gaussian µ Rd 1
2
θ θ d
2
log 2π − 1
2
x x x νL
c 2015 Frank Nielsen 51](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-51-320.jpg)
![Higher-order Vajda χk
divergences [7]
The (signed) χk
P distance between members X1 ∼ EF (θ1) and
X2 ∼ EF (θ2) of the same ane exponential family is (k ∈ N)
always bounded and equal to :
χk
P(X1 : X2) =
k
j=0
(−1)k−j k
j
eF((1−j)θ1+jθ2)
e(1−j)F(θ1)+jF(θ2)
For Poisson/Normal distributions, we get closed-form formula :
χk
P(λ1 : λ2) =
k
j=0
(−1)k−j k
j
eλ1−j
1 λj
2−((1−j)λ1+jλ2)
,
χk
P(µ1 : µ2) =
k
j=0
(−1)k−j k
j
e
1
2 j(j−1)(µ1−µ2) (µ1−µ2)
.
c 2015 Frank Nielsen 52](https://image.slidesharecdn.com/icms-introcig-150921173117-lva1-app6891/85/Computational-Information-Geometry-A-quick-review-ICMS-52-320.jpg)




The document provides a comprehensive overview of computational information geometry, focusing on its applications in image and signal processing. It discusses key concepts such as Fisher information, Bregman divergence, and various distance measures in probability manifolds, along with the exploration of geometrical structures related to statistical models. Additionally, it emphasizes the importance of understanding relationships between distances and geometries for developing efficient algorithms in this field.