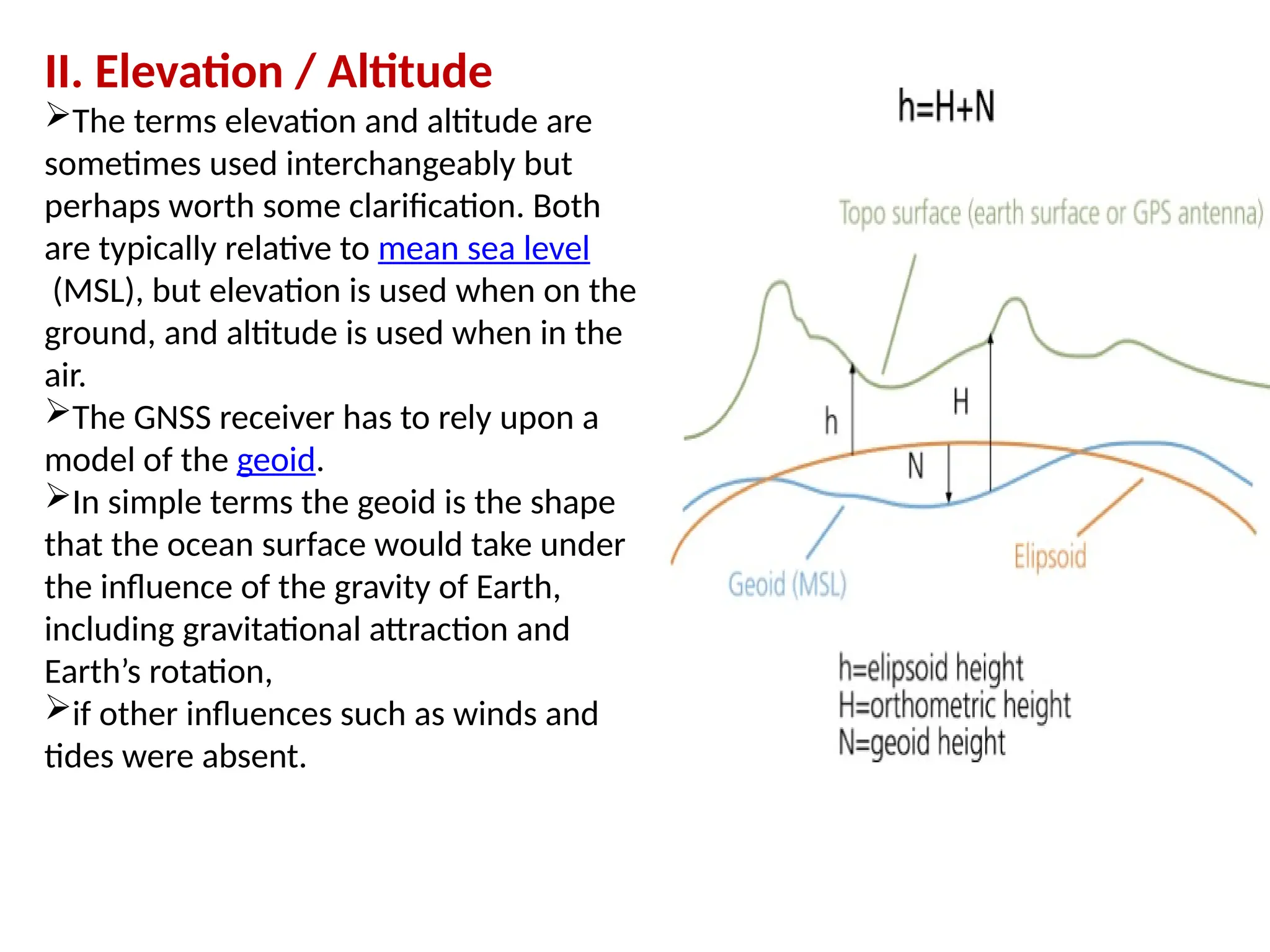
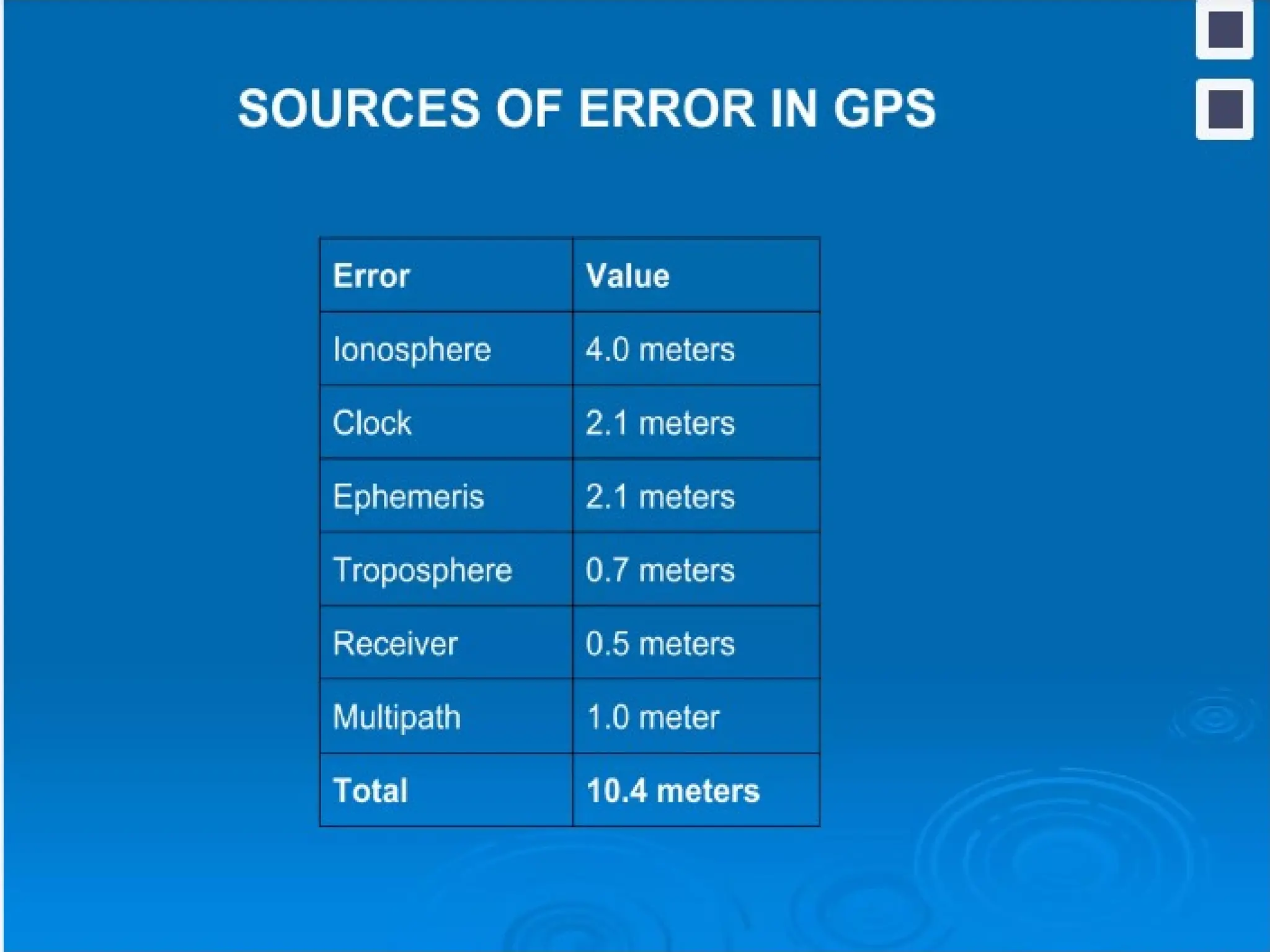
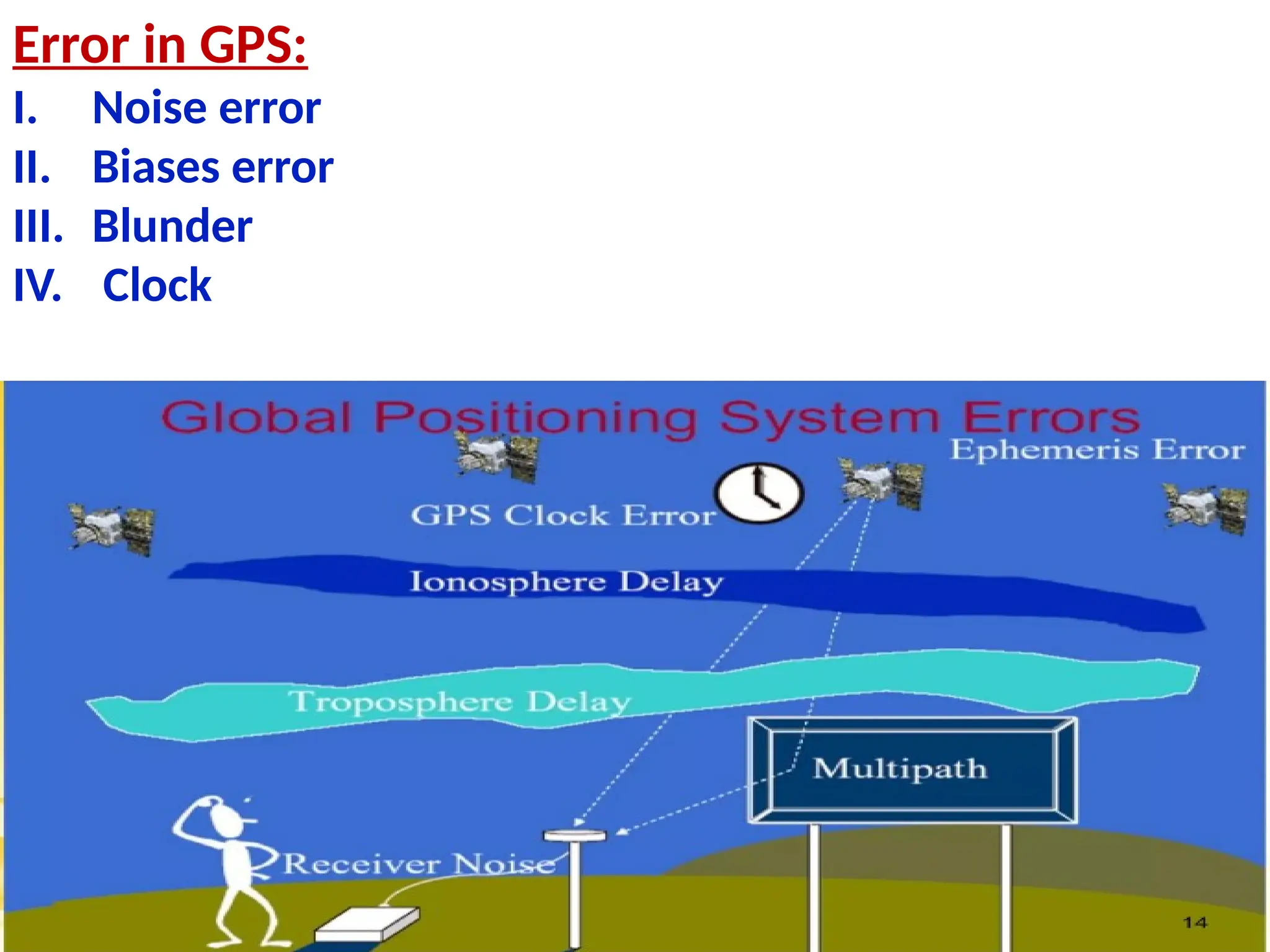
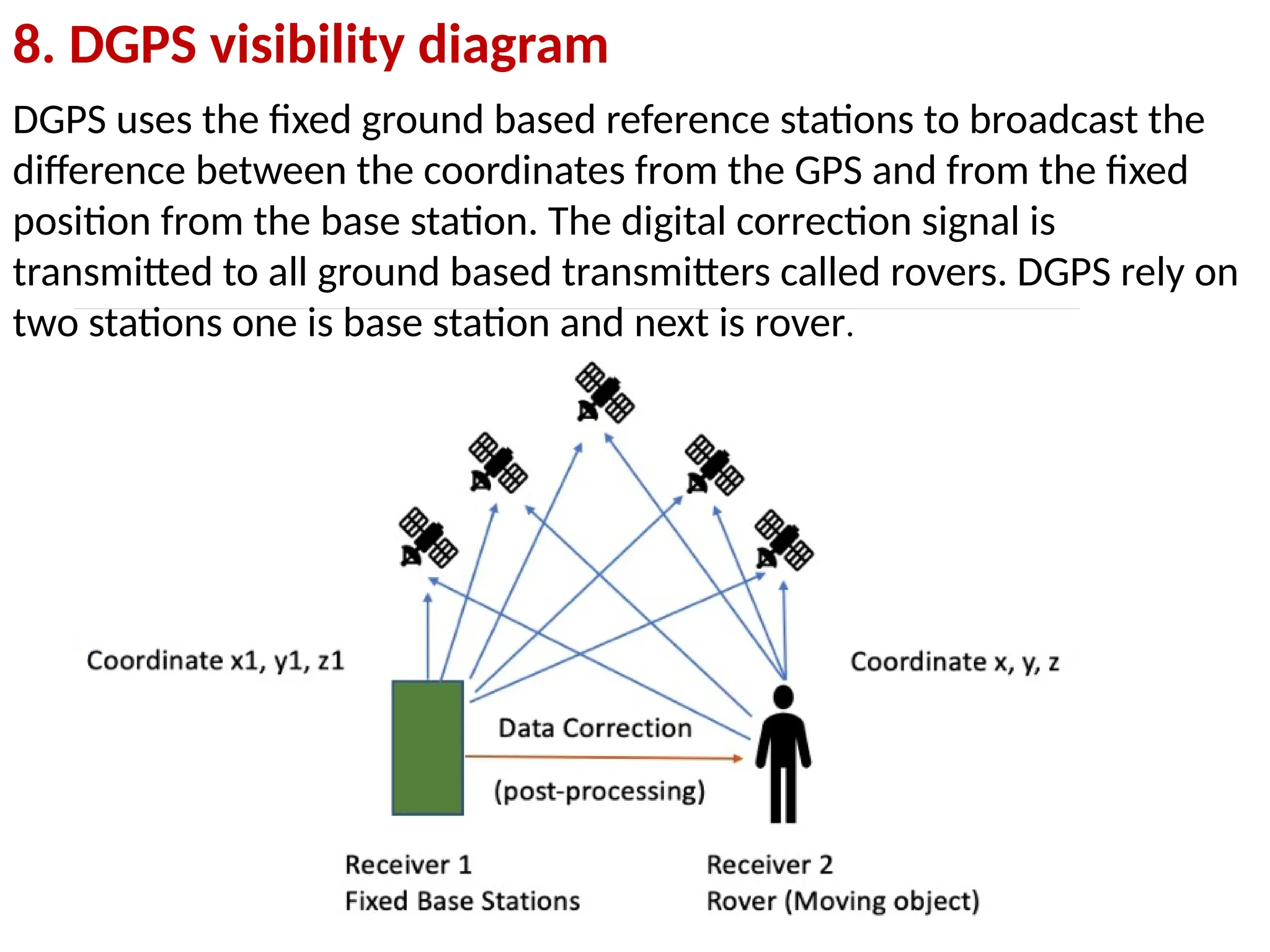
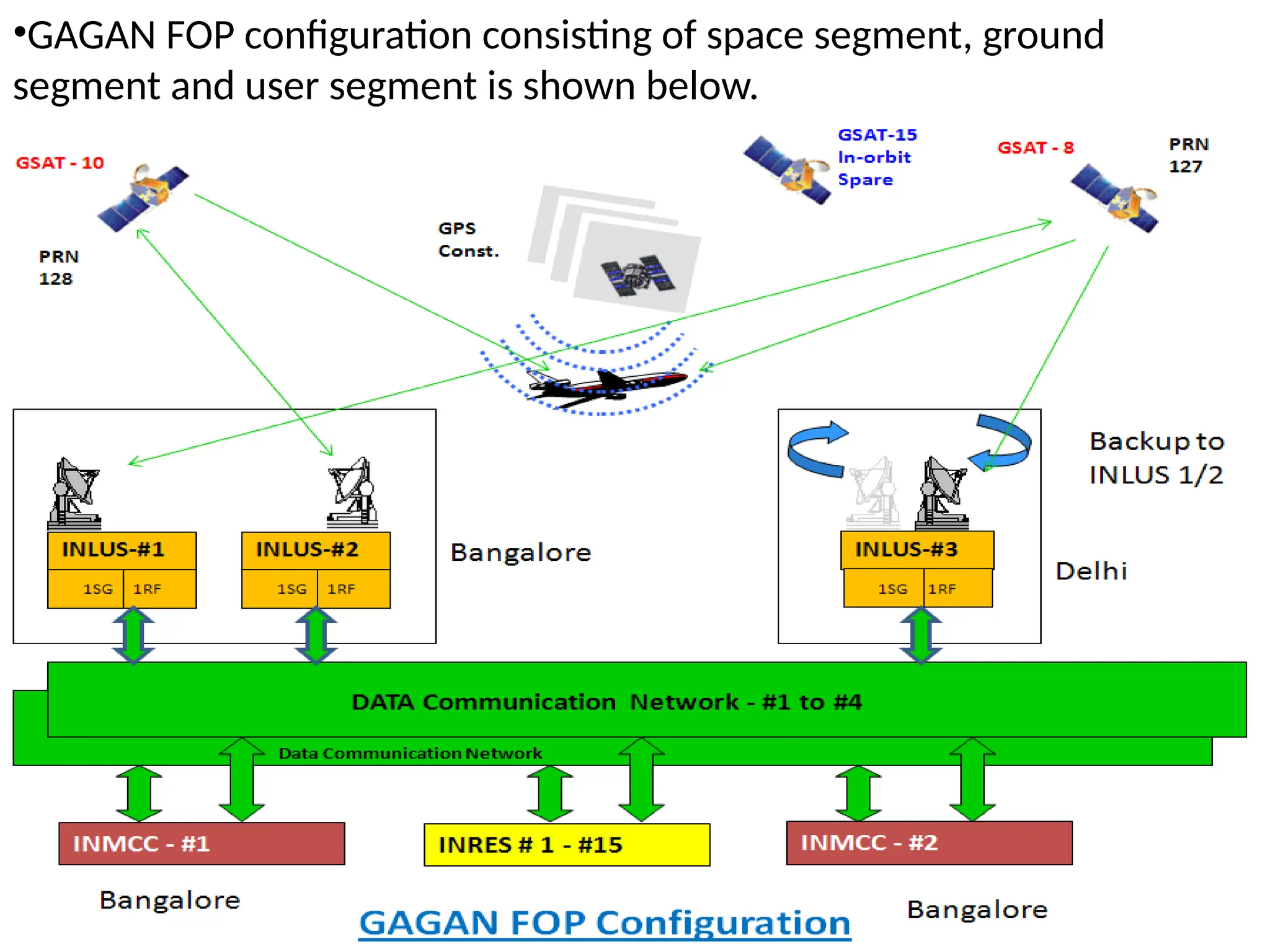
The document provides a comprehensive overview of the Global Positioning System (GPS), including its principles of operation, satellite ranging methods, and application in surveying. It explains how GPS determines precise position and time using satellite signals, the concept of differential GPS (DGPS) for improved accuracy, and the implementation of the GAGAN project by India for satellite-based augmentation. Additionally, it discusses the sources of errors in GPS measurements and various surveying methods employed in practical applications.