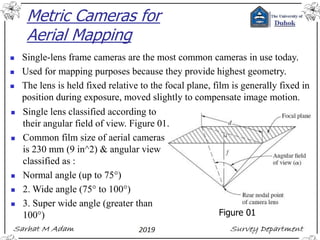
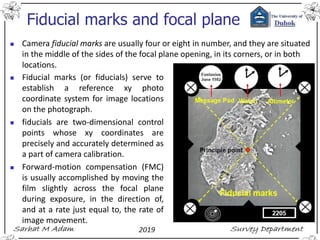
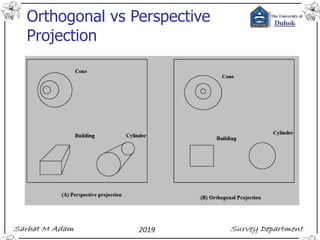
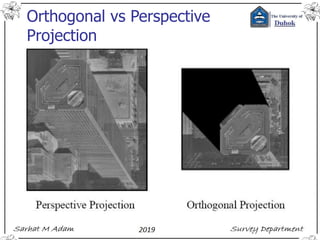
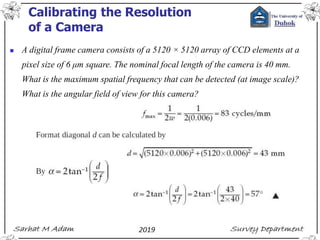
This document discusses the use of metric cameras for aerial mapping, detailing various types of lenses, their classifications, and geometric properties important for mapping tasks. It highlights the importance of camera calibration, fiducial marks, forward-motion compensation, and the technology behind digital mapping cameras. Additionally, it contrasts aerial photos with maps, emphasizing the differences in projection methods and accuracy in representation.