Downloaded 76 times

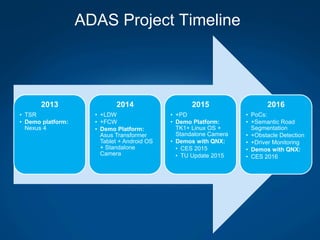
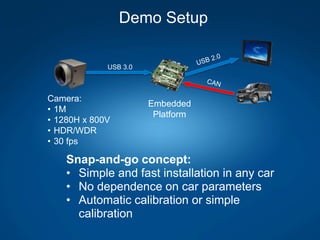

This document discusses the development of an ADAS system from scratch by Itseez, which was acquired by IoTG/Intel in 2016. It outlines their strategy of creating highly portable computer vision algorithms using OpenCV and developing their own datasets. It details their timeline and challenges faced with hardware issues, testing paradigms, and limited datasets. Recent proofs of concept using semantic segmentation and obstacle detection with deep learning are also mentioned.