Downloaded 1,305 times


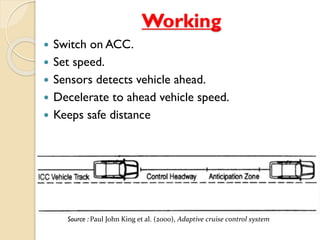




The document outlines the functionality and benefits of adaptive cruise control (ACC) systems, which enhance traditional cruise control by automatically maintaining safe distances from preceding vehicles. It discusses the components, working principles, advantages, and disadvantages of ACC, emphasizing its potential to reduce driver stress and accidents. Despite its benefits, challenges like high costs and limited effectiveness in heavy traffic are noted, with future developments expected to improve integration and communication between vehicles.



































































