Autonomous metal search,collect and collision avoidance robot
•Download as PPTX, PDF•
2 likes•566 views
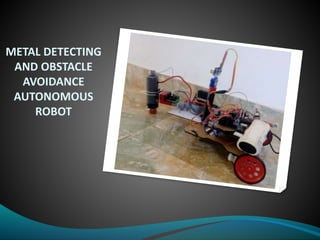
The document describes the design of an autonomous robot that can detect metals and obstacles. The robot uses an Arduino microcontroller along with ultrasonic sensors for obstacle avoidance and an inductive proximity sensor as a metal detector. It also uses motors, a motor driver, and an electromagnet to move around, detect metals, and pick them up when found. The objective is to build a robotic vehicle that can sense metals and pick them up and place in a designated area.
Report
Share
Report
Share

Recommended
Obstacle Detector &
Find The Way to Reach Destination Robot
This robot will be just like an electronic car that keeps on moving in straight line until something comes in its path that’s when it decides to turns into some other direction so it successfully avoids the obstacle.
Obstacle Avoidance Robot
This document describes a student robotics project. The project involves building a robot that can sense obstacles using IR sensors, avoid obstacles autonomously, and resume its path. The robot is controlled by an AVR ATmega16 microcontroller. It uses an IR sensor to detect obstacles and an L293D motor driver and DC motors for movement. When an obstacle is detected, the microcontroller diverts the robot left or right to avoid the obstacle before resuming its forward motion. The project aims to create a mobile robot that can navigate independently within certain limitations.
Obstacle Avoidance Robot Summer training Presentation
i did an extremely hard work on it. I believe that you all my friends will surely get the benefit of this presentation. As a student of B.tech I just wish to assist those who always ready to assist another one. thanks for reading......
Obstacle_Avoidance_Robot_Coruse_Project_ECET402_Mechatronics_FinalCopy
This document describes an obstacle avoidance robot designed and built by Elijah Barner. The robot uses an Arduino Uno microcontroller along with an ultrasonic sensor and motor shield to drive two DC motors. The ultrasonic sensor transmits and receives radio frequency signals to determine the distance to obstacles in front of the robot. The Arduino code translates the sensor signals and controls the motors to maneuver around obstacles by moving forward, backward, or changing directions. Diagrams show the hardware components and signal flow. The appendices provide additional illustrations and definitions of the inputs, outputs, software, and references used.
Obstacle Avoiding Robot Report Robot23
This document describes the design and development of an obstacle avoiding robot. The robot uses infrared sensors and a microcontroller to detect and avoid obstacles in its path. When an obstacle is detected, the microcontroller stops one motor and moves the other, causing the robot to turn away from the obstacle. The robot was designed using software like DipTrace and programmed using Keil uVision. It was tested to ensure proper functioning and avoids obstacles as intended. Potential applications and future improvements are also discussed.
Obstacle avoidance robot
Powerpoint Presentation On Obstacle Avoidance Robot
Download the ppt file from the following link::
https://adf.ly/rdC2Z
Obstacle avoiding robot
Obstacle Avoiding robot is a self thinking robot which can take decisions itself using programmed brain without any guidance from human beings. In our Project we use Infrared to sense obstacles and take movements accordingly. Our Project
mainly used in military application, small toys and also used in mines by increasing IR sensors.
Obstacle Avoidance Robot (Powered by Arduino)
This document describes the components, working, circuit, source code, and scope of an obstacle avoidance robot powered by an Arduino. The main components are a chassis, Arduino UNO microcontroller, DC motor, motor driver, ultrasonic sensor, and servo motor. The robot uses the ultrasonic sensor to calculate distances and detects obstacles. It then controls the DC motor and servo motor using the motor driver and Arduino to avoid obstacles and navigate autonomously. The source code contains functions for movement, distance calculation, and sensor control. Potential applications discussed for further development include using it as a firefighting, mining, driverless vehicle, or cleaning robot.
Recommended
Obstacle Detector &
Find The Way to Reach Destination Robot
This robot will be just like an electronic car that keeps on moving in straight line until something comes in its path that’s when it decides to turns into some other direction so it successfully avoids the obstacle.
Obstacle Avoidance Robot
This document describes a student robotics project. The project involves building a robot that can sense obstacles using IR sensors, avoid obstacles autonomously, and resume its path. The robot is controlled by an AVR ATmega16 microcontroller. It uses an IR sensor to detect obstacles and an L293D motor driver and DC motors for movement. When an obstacle is detected, the microcontroller diverts the robot left or right to avoid the obstacle before resuming its forward motion. The project aims to create a mobile robot that can navigate independently within certain limitations.
Obstacle Avoidance Robot Summer training Presentation
i did an extremely hard work on it. I believe that you all my friends will surely get the benefit of this presentation. As a student of B.tech I just wish to assist those who always ready to assist another one. thanks for reading......
Obstacle_Avoidance_Robot_Coruse_Project_ECET402_Mechatronics_FinalCopy
This document describes an obstacle avoidance robot designed and built by Elijah Barner. The robot uses an Arduino Uno microcontroller along with an ultrasonic sensor and motor shield to drive two DC motors. The ultrasonic sensor transmits and receives radio frequency signals to determine the distance to obstacles in front of the robot. The Arduino code translates the sensor signals and controls the motors to maneuver around obstacles by moving forward, backward, or changing directions. Diagrams show the hardware components and signal flow. The appendices provide additional illustrations and definitions of the inputs, outputs, software, and references used.
Obstacle Avoiding Robot Report Robot23
This document describes the design and development of an obstacle avoiding robot. The robot uses infrared sensors and a microcontroller to detect and avoid obstacles in its path. When an obstacle is detected, the microcontroller stops one motor and moves the other, causing the robot to turn away from the obstacle. The robot was designed using software like DipTrace and programmed using Keil uVision. It was tested to ensure proper functioning and avoids obstacles as intended. Potential applications and future improvements are also discussed.
Obstacle avoidance robot
Powerpoint Presentation On Obstacle Avoidance Robot
Download the ppt file from the following link::
https://adf.ly/rdC2Z
Obstacle avoiding robot
Obstacle Avoiding robot is a self thinking robot which can take decisions itself using programmed brain without any guidance from human beings. In our Project we use Infrared to sense obstacles and take movements accordingly. Our Project
mainly used in military application, small toys and also used in mines by increasing IR sensors.
Obstacle Avoidance Robot (Powered by Arduino)
This document describes the components, working, circuit, source code, and scope of an obstacle avoidance robot powered by an Arduino. The main components are a chassis, Arduino UNO microcontroller, DC motor, motor driver, ultrasonic sensor, and servo motor. The robot uses the ultrasonic sensor to calculate distances and detects obstacles. It then controls the DC motor and servo motor using the motor driver and Arduino to avoid obstacles and navigate autonomously. The source code contains functions for movement, distance calculation, and sensor control. Potential applications discussed for further development include using it as a firefighting, mining, driverless vehicle, or cleaning robot.
Obstacle Detctor Robot
This document describes an obstacle avoiding robot with a vacuum cleaner. The robot uses IR sensors and transmitting circuits to detect obstacles and then decides to avoid them by turning left or right. It also includes a blower to suck up dust and particles, functioning as a vacuum cleaner. The circuit diagram and software used are included. Potential applications are discussed such as use in concealed paths, as a weight lifter, or in mines. The future scope could involve adding a camera for beyond line-of-sight driving or modifying it to function as a firefighting robot.
Arduino Final Project
This project aimed to create an obstacle avoiding rover using an ultrasonic sensor and 4WD platform. The rover was able to scan in front using the sensor, detect obstacles within 12 inches, and maneuver around them. However, the project was incomplete as the rover struggled with traction issues and could not consistently move forward after avoiding obstacles. The sensor also had accuracy problems. While the concept showed promise, numerous bugs could not be resolved within the time frame. Improved equipment and a different approach may have led to better results.
Obstacle avoiding Robot
The document describes an obstacle avoiding robot created by four group members using an Arduino UNO, ultrasonic sensor, DC motor driver, and connecting wires. The robot senses obstacles in its path using the ultrasonic sensor, avoids obstacles by reversing or turning, and resumes moving forward once the path is clear. The robot's program uses the ultrasonic sensor readings to determine its speed and maneuvering.
Obstacle detection Robot using Ultrasonic Sensor and Arduino UNO
This document describes how to build an obstacle detection robot using an Arduino UNO, ultrasonic sensor, and motor driver module. It explains the components used, including the Arduino, ultrasonic sensor to detect obstacles from 2-400cm away, and an L298N motor driver module to control DC motors. It provides details on connecting the components, programming the ultrasonic sensor to trigger and receive echo signals to determine distances, and controlling the motor's direction depending on detected obstacles to help the robot navigate. Code and more details are available at the provided GitHub link.
obstacle avoiding robot
This document describes an obstacle avoiding robot. The robot uses an Arduino Uno microcontroller, ultrasonic sensor, DC motors, motor driver module, and other components. It measures distance to obstacles using the ultrasonic sensor and triggers different motor movements to avoid obstacles. The connections and code are provided to trigger the motors to move forward when no obstacle is detected and turn when an obstacle is close, helping the robot avoid collisions during movement.
Final report obstacle avoiding roboat
This document is an obstacle avoiding car project report submitted by three students - Utkarsh Bingewar, Shubham Thakur, and Rupesh Rote - to partially fulfill their project requirements for a bachelor's degree in electronics and telecommunications engineering. The report describes the design and implementation of a robotic vehicle that uses an ultrasonic sensor and microcontroller to detect and avoid obstacles in its path by controlling two DC motors through a motor driver. Experimental results show the car is able to successfully detect and navigate around obstacles.
Design, Implementation and Control of a Humanoid Robot for Obstacle Avoidance...
In this paper, the design, implementation and control of a humanoid robot, which enables humanlike
walk and a path planning of humanoid robot for obstacle avoidance by using infrared sensors (IRs) is
proposed. As the focus is to obtain human-like walk, the robot is designed to resemble human proportions.
Based on the obtained information from IR sensors, a software flow proposed to decide the behaviour of robot
so that the robot avoids obstacles and goes to the destination. Furthermore the hardware and software
necessary to obtain a fully autonomous system is developed and implemented. Human-like walk was not
obtained on the real system, due to system limitations. If a new interface to the DC-motors in the servos was
developed, and a faster on-board computer was chosen, human-like walk should be possible.
Obstacle avoiding car project slide
My 1st project work done by me and my group successfully. Maybe there are lots of faults, but our team tries our best to solve it accurately, types of equipment and their working procedure are given in this slide as much as possible...
Obstacle Avoidance Robotic Vehicle
Edgefxkits.com has a wide range of electronic projects ideas that are primarily helpful for ECE, EEE and EIE students and the ideas can be applied for real life purposes as well.
http://www.edgefxkits.com/
Visit our page to get more ideas on popular electronic projects developed by professionals.
Edgefx provides free verified electronic projects kits around the world with abstracts, circuit diagrams, and free electronic software. We provide guidance manual for Do It Yourself Kits (DIY) with the modules at best price along with free shipping.
Microcontoller
1. The document describes an obstacle avoiding robot that uses an 8051 microcontroller and infrared sensors to detect obstacles and change direction to avoid collisions.
2. It uses a dual full H bridge motor driver and DC motors to change the robot's direction upon detecting an obstacle with its infrared sensors.
3. The robot is capable of automated navigation and obstacle avoidance, making it useful for applications like automated vehicles.
Obstacle Avoidance Robot
This presentation explains about the obstacle avoidance robot, its equipments, connections, working, applications & how to make one by yourself.
OBSTACLE AVOIDING CAR
This document describes an obstacle avoiding car project created by Utkarsh Bingewar, Shubham Thakur, and Rupesh Rote, with guidance from their assistant professor Mrs. Varsha Nanaware. The car uses an ultrasonic sensor and Arduino board to detect obstacles and navigate around them. When an obstacle is detected, the Arduino controls the motors to turn the car left or right to avoid the obstacle. The obstacle avoiding car has applications in areas like surveillance, hazardous environments, and unmanned vehicle navigation.
Obstacle Detection Robot
This document describes a project to design an obstacle detection algorithm for robotics using an infrared sensor system. A team of 5 students developed an embedded C program for an intelligent robot that can detect and avoid obstacles using 3 infrared sensors and an AT89S52 microcontroller. The robot is able to navigate collision-free using this multi-sensor integration technique. The hardware components include infrared sensors, a motor driver IC, DC motors, an LCD, and a comparator. The software was developed using Kiel compiler and embedded C language. The robot is able to safely reach its goal in an unknown environment by overcoming obstacles without human guidance.
Obstacle and edge detector report.
The document describes an edge-avoiding robot that uses infrared (IR) sensors to detect edges and avoid falling off surfaces. It works by emitting IR rays from sensor modules and detecting the reflected rays. If both sensors receive rays, it continues forward. If one sensor detects an edge and stops receiving rays while the other still does, the robot turns away from the edge. The robot's hardware components include an Arduino, motor driver, DC motors, IR sensors, and other parts. It also explains how the ultrasonic sensor, servo motor, and motor driver circuit work.
Line Following Robot
This document describes a line following robot project built using an Arduino microcontroller. It lists the components used, which include the Arduino UNO, IR sensors, an L298N motor driver, DC motors, and a chassis. It explains the working principle of how the IR sensors detect a line and the motor driver is used to control the DC motors to follow the line. Diagrams of the circuit, programming code, potential applications, and advantages/disadvantages of the line following robot are also provided.
Real-time Obstacle Avoidance Algorithm for Mobile Robots
The document presents an obstacle avoidance algorithm for mobile robots that uses ultrasonic sensors to detect obstacles and then implements the Bug 1 and Bug 2 algorithms to navigate around obstacles in a reactive manner. It describes the Bug algorithms, compares Bug 1 and Bug 2, and discusses other algorithms like VFH and potential fields. Potential applications of obstacle detection algorithms discussed include mining vehicles, smart cars, and autonomous cleaning robots.
Grid solving robot
This paper presents Grid Solver Bot which is a self-driven vehicle capable of localizing itself in a grid and planning a path between two nodes. It can avoid particular nodes and plan path between two allowed nodes. Breadth-first search & Dijkstra's Algorithm have been used for finding the path between two allowed nodes. The searching of a block over grid is easier when the rows and columns i.e. m* n of a grid is fixed. But when the grid is dynamic or changes over time than in such situation we require a generalized algorithm for traversing over a grid. In these paper we develop an approach for searching an object and also able to avoid an obstacle which was placed in a junction (meeting point of row and column). Here, we use different algorithms like Dijkistra’s, Best first search and A star algorithms. We develop an approach to find the block with minimum shortest path with the help of priority based algorithm. The vehicle is also capable of transferring blocks from one node to another. In fact, this vehicle is a prototype of a self-driven vehicle capable of transporting passengers and it can also be used in industries to transfer different items from one place to another.
Obstacle detctor
This document describes an obstacle avoiding robot with a vacuum cleaner. The robot uses IR sensors and a microcontroller to detect obstacles and navigate around them while using a blower to function as a vacuum cleaner. It discusses the components, circuit diagram, software, applications and future enhancements such as adding a camera to increase range or modifying it to function as a firefighting robot. The goal is to create a robot that can autonomously clean an area while avoiding obstacles.
Line follower12
The document describes the design of a line follower robot using an Arduino kit. The robot uses IR sensors mounted on the front left and right to detect a black line on a light surface. When both sensors detect white, the robot moves forward. When one sensor detects black, the microcontroller stops the associated motor, causing the robot to turn in the direction of the line. Potential applications include use in industrial equipment transport, as automated vehicles, for domestic tasks like cleaning, and for guidance in public spaces.
Obstacle Avoidance ROBOT using ARDUINO
This is a presentation of OBSTACLE AVOIDANCE ROBOT. which has the details on making an obstacle avoider using arduino uno, ultrasonic sensor. This presentation has the detailed description of all the components that are being used in making. And also circuit diagram and flow chart of the robot.
How to build a robot with an arduino and 8051 microcontroller
This article discusses about how to build a robot vehicle with arduino, AVR, robot body, DC motor, 8051 microcontroller, metal detector and motor driver IC.
Detecting proximity events in sensor networks
This document discusses detecting proximity events in sensor networks. It introduces the concept of proximity queries, which allows sensor nodes to report interesting events observed within a certain distance of each other. It describes how sensor nodes scattered in a sensor field can detect proximity events using local routing indices and transmit data along predefined or unknown paths. It addresses problems that can occur, such as wasted messages when no matching events are nearby, and presents solutions like rumor-based approaches and incrementally updating local routing indices.
More Related Content
What's hot
Obstacle Detctor Robot
This document describes an obstacle avoiding robot with a vacuum cleaner. The robot uses IR sensors and transmitting circuits to detect obstacles and then decides to avoid them by turning left or right. It also includes a blower to suck up dust and particles, functioning as a vacuum cleaner. The circuit diagram and software used are included. Potential applications are discussed such as use in concealed paths, as a weight lifter, or in mines. The future scope could involve adding a camera for beyond line-of-sight driving or modifying it to function as a firefighting robot.
Arduino Final Project
This project aimed to create an obstacle avoiding rover using an ultrasonic sensor and 4WD platform. The rover was able to scan in front using the sensor, detect obstacles within 12 inches, and maneuver around them. However, the project was incomplete as the rover struggled with traction issues and could not consistently move forward after avoiding obstacles. The sensor also had accuracy problems. While the concept showed promise, numerous bugs could not be resolved within the time frame. Improved equipment and a different approach may have led to better results.
Obstacle avoiding Robot
The document describes an obstacle avoiding robot created by four group members using an Arduino UNO, ultrasonic sensor, DC motor driver, and connecting wires. The robot senses obstacles in its path using the ultrasonic sensor, avoids obstacles by reversing or turning, and resumes moving forward once the path is clear. The robot's program uses the ultrasonic sensor readings to determine its speed and maneuvering.
Obstacle detection Robot using Ultrasonic Sensor and Arduino UNO
This document describes how to build an obstacle detection robot using an Arduino UNO, ultrasonic sensor, and motor driver module. It explains the components used, including the Arduino, ultrasonic sensor to detect obstacles from 2-400cm away, and an L298N motor driver module to control DC motors. It provides details on connecting the components, programming the ultrasonic sensor to trigger and receive echo signals to determine distances, and controlling the motor's direction depending on detected obstacles to help the robot navigate. Code and more details are available at the provided GitHub link.
obstacle avoiding robot
This document describes an obstacle avoiding robot. The robot uses an Arduino Uno microcontroller, ultrasonic sensor, DC motors, motor driver module, and other components. It measures distance to obstacles using the ultrasonic sensor and triggers different motor movements to avoid obstacles. The connections and code are provided to trigger the motors to move forward when no obstacle is detected and turn when an obstacle is close, helping the robot avoid collisions during movement.
Final report obstacle avoiding roboat
This document is an obstacle avoiding car project report submitted by three students - Utkarsh Bingewar, Shubham Thakur, and Rupesh Rote - to partially fulfill their project requirements for a bachelor's degree in electronics and telecommunications engineering. The report describes the design and implementation of a robotic vehicle that uses an ultrasonic sensor and microcontroller to detect and avoid obstacles in its path by controlling two DC motors through a motor driver. Experimental results show the car is able to successfully detect and navigate around obstacles.
Design, Implementation and Control of a Humanoid Robot for Obstacle Avoidance...
In this paper, the design, implementation and control of a humanoid robot, which enables humanlike
walk and a path planning of humanoid robot for obstacle avoidance by using infrared sensors (IRs) is
proposed. As the focus is to obtain human-like walk, the robot is designed to resemble human proportions.
Based on the obtained information from IR sensors, a software flow proposed to decide the behaviour of robot
so that the robot avoids obstacles and goes to the destination. Furthermore the hardware and software
necessary to obtain a fully autonomous system is developed and implemented. Human-like walk was not
obtained on the real system, due to system limitations. If a new interface to the DC-motors in the servos was
developed, and a faster on-board computer was chosen, human-like walk should be possible.
Obstacle avoiding car project slide
My 1st project work done by me and my group successfully. Maybe there are lots of faults, but our team tries our best to solve it accurately, types of equipment and their working procedure are given in this slide as much as possible...
Obstacle Avoidance Robotic Vehicle
Edgefxkits.com has a wide range of electronic projects ideas that are primarily helpful for ECE, EEE and EIE students and the ideas can be applied for real life purposes as well.
http://www.edgefxkits.com/
Visit our page to get more ideas on popular electronic projects developed by professionals.
Edgefx provides free verified electronic projects kits around the world with abstracts, circuit diagrams, and free electronic software. We provide guidance manual for Do It Yourself Kits (DIY) with the modules at best price along with free shipping.
Microcontoller
1. The document describes an obstacle avoiding robot that uses an 8051 microcontroller and infrared sensors to detect obstacles and change direction to avoid collisions.
2. It uses a dual full H bridge motor driver and DC motors to change the robot's direction upon detecting an obstacle with its infrared sensors.
3. The robot is capable of automated navigation and obstacle avoidance, making it useful for applications like automated vehicles.
Obstacle Avoidance Robot
This presentation explains about the obstacle avoidance robot, its equipments, connections, working, applications & how to make one by yourself.
OBSTACLE AVOIDING CAR
This document describes an obstacle avoiding car project created by Utkarsh Bingewar, Shubham Thakur, and Rupesh Rote, with guidance from their assistant professor Mrs. Varsha Nanaware. The car uses an ultrasonic sensor and Arduino board to detect obstacles and navigate around them. When an obstacle is detected, the Arduino controls the motors to turn the car left or right to avoid the obstacle. The obstacle avoiding car has applications in areas like surveillance, hazardous environments, and unmanned vehicle navigation.
Obstacle Detection Robot
This document describes a project to design an obstacle detection algorithm for robotics using an infrared sensor system. A team of 5 students developed an embedded C program for an intelligent robot that can detect and avoid obstacles using 3 infrared sensors and an AT89S52 microcontroller. The robot is able to navigate collision-free using this multi-sensor integration technique. The hardware components include infrared sensors, a motor driver IC, DC motors, an LCD, and a comparator. The software was developed using Kiel compiler and embedded C language. The robot is able to safely reach its goal in an unknown environment by overcoming obstacles without human guidance.
Obstacle and edge detector report.
The document describes an edge-avoiding robot that uses infrared (IR) sensors to detect edges and avoid falling off surfaces. It works by emitting IR rays from sensor modules and detecting the reflected rays. If both sensors receive rays, it continues forward. If one sensor detects an edge and stops receiving rays while the other still does, the robot turns away from the edge. The robot's hardware components include an Arduino, motor driver, DC motors, IR sensors, and other parts. It also explains how the ultrasonic sensor, servo motor, and motor driver circuit work.
Line Following Robot
This document describes a line following robot project built using an Arduino microcontroller. It lists the components used, which include the Arduino UNO, IR sensors, an L298N motor driver, DC motors, and a chassis. It explains the working principle of how the IR sensors detect a line and the motor driver is used to control the DC motors to follow the line. Diagrams of the circuit, programming code, potential applications, and advantages/disadvantages of the line following robot are also provided.
Real-time Obstacle Avoidance Algorithm for Mobile Robots
The document presents an obstacle avoidance algorithm for mobile robots that uses ultrasonic sensors to detect obstacles and then implements the Bug 1 and Bug 2 algorithms to navigate around obstacles in a reactive manner. It describes the Bug algorithms, compares Bug 1 and Bug 2, and discusses other algorithms like VFH and potential fields. Potential applications of obstacle detection algorithms discussed include mining vehicles, smart cars, and autonomous cleaning robots.
Grid solving robot
This paper presents Grid Solver Bot which is a self-driven vehicle capable of localizing itself in a grid and planning a path between two nodes. It can avoid particular nodes and plan path between two allowed nodes. Breadth-first search & Dijkstra's Algorithm have been used for finding the path between two allowed nodes. The searching of a block over grid is easier when the rows and columns i.e. m* n of a grid is fixed. But when the grid is dynamic or changes over time than in such situation we require a generalized algorithm for traversing over a grid. In these paper we develop an approach for searching an object and also able to avoid an obstacle which was placed in a junction (meeting point of row and column). Here, we use different algorithms like Dijkistra’s, Best first search and A star algorithms. We develop an approach to find the block with minimum shortest path with the help of priority based algorithm. The vehicle is also capable of transferring blocks from one node to another. In fact, this vehicle is a prototype of a self-driven vehicle capable of transporting passengers and it can also be used in industries to transfer different items from one place to another.
Obstacle detctor
This document describes an obstacle avoiding robot with a vacuum cleaner. The robot uses IR sensors and a microcontroller to detect obstacles and navigate around them while using a blower to function as a vacuum cleaner. It discusses the components, circuit diagram, software, applications and future enhancements such as adding a camera to increase range or modifying it to function as a firefighting robot. The goal is to create a robot that can autonomously clean an area while avoiding obstacles.
Line follower12
The document describes the design of a line follower robot using an Arduino kit. The robot uses IR sensors mounted on the front left and right to detect a black line on a light surface. When both sensors detect white, the robot moves forward. When one sensor detects black, the microcontroller stops the associated motor, causing the robot to turn in the direction of the line. Potential applications include use in industrial equipment transport, as automated vehicles, for domestic tasks like cleaning, and for guidance in public spaces.
What's hot (19)
Obstacle detection Robot using Ultrasonic Sensor and Arduino UNO
Obstacle detection Robot using Ultrasonic Sensor and Arduino UNO
Design, Implementation and Control of a Humanoid Robot for Obstacle Avoidance...
Design, Implementation and Control of a Humanoid Robot for Obstacle Avoidance...
Real-time Obstacle Avoidance Algorithm for Mobile Robots
Real-time Obstacle Avoidance Algorithm for Mobile Robots
Viewers also liked
Obstacle Avoidance ROBOT using ARDUINO
This is a presentation of OBSTACLE AVOIDANCE ROBOT. which has the details on making an obstacle avoider using arduino uno, ultrasonic sensor. This presentation has the detailed description of all the components that are being used in making. And also circuit diagram and flow chart of the robot.
How to build a robot with an arduino and 8051 microcontroller
This article discusses about how to build a robot vehicle with arduino, AVR, robot body, DC motor, 8051 microcontroller, metal detector and motor driver IC.
Detecting proximity events in sensor networks
This document discusses detecting proximity events in sensor networks. It introduces the concept of proximity queries, which allows sensor nodes to report interesting events observed within a certain distance of each other. It describes how sensor nodes scattered in a sensor field can detect proximity events using local routing indices and transmit data along predefined or unknown paths. It addresses problems that can occur, such as wasted messages when no matching events are nearby, and presents solutions like rumor-based approaches and incrementally updating local routing indices.
Zigbee based metal detecting robot to assist bomb detection and rescue team
This document describes a project to create a remote-controlled robot for bomb detection and rescue operations. The robot will use a metal detector, GPS, and wireless communication over Zigbee to locate bombs and transmit the position to rescuers. It will be controlled by an ARM7 microcontroller and can detect bombs without putting lives at risk. The project aims to develop an affordable, unmanned solution to improve bomb detection and rescue efforts.
Mobille phone detector
This document describes a mobile phone detector circuit that can sense activated mobile phones from 1.5 meters away. It uses a disk capacitor that acts as a small loop antenna to capture radio frequency signals from mobile phones. An op-amp converts the tiny current from the capacitor into a voltage that triggers an alarm when a phone is detected. The compact design makes it suitable for preventing phone use in places like exam halls or detecting unauthorized spying.
Fire Fighting Robotic Vehicle
This ppt explains on Fire Fighting Robotic Vehicle that it motivated by the desire to design a system that can detect fires and take appropriate action, without any human intervention.
Edgefxkits.com has a wide range of electronic projects ideas that are primarily helpful for ECE, EEE and EIE students and the ideas can be applied for real life purposes as well.
http://www.edgefxkits.com/
Visit our page to get more ideas on popular electronic projects developed by professionals.
Edgefx provides free verified electronic projects kits around the world with abstracts, circuit diagrams, and free electronic software. We provide guidance manual for Do It Yourself Kits (DIY) with the modules at best price along with free shipping.
AUTOMATED METAL DETECTOR ROBOTIC VEHICLE WITH MANUAL CONTROL USING BLUETOOTH
Automatic robotic vehicle avoiding obstacle and detecting metal provided with an manual control through bluetooth
Simple metal detector by Pratik Mankar
This document describes the design and components of a simple metal detector circuit. It includes an introduction explaining how metal detectors work by detecting changes in a coil's magnetic field from nearby metals. The circuit uses a transistor as a Colpitts oscillator whose frequency shifts when metal is near the coil. Key components are listed along with explanations of their purpose and properties. Advantages of the simple design are portability and ability to detect metals, while limitations are low sensitivity and fixed capacitor values. Applications discussed include security screening and construction use to locate rebar or pipes.
Metal Detector Robotic Vehicle
This ppt explains Metal Detector Robotic Vehicle, student is provided with his/her authorized tag to swipe over the reader to record their attendance.
Edgefxkits.com has a wide range of electronic projects ideas that are primarily helpful for ECE, EEE and EIE students and the ideas can be applied for real life purposes as well.
http://www.edgefxkits.com/
Visit our page to get more ideas on popular electronic projects developed by professionals.
Edgefx provides free verified electronic projects kits around the world with abstracts, circuit diagrams, and free electronic software. We provide guidance manual for Do It Yourself Kits (DIY) with the modules at best price along with free shipping.
Metal detector robot
This document proposes a metal detection robot that can detect metals ahead of it and avoid collisions using ultrasonic sensors. The robot uses an Arduino Uno microcontroller board to control two DC motors via a motor driver chip and detect metals using a metal detector coil. Ultrasonic sensors help the robot detect and avoid obstacles to provide a safe metal detecting robot that can operate in hazardous environments.
Obstacle Detctor Robot report
This document is a project report for an IR obstacle detector integrated with a vacuum cleaner robot. It includes sections on the construction of the hardware and software units, describing the basic parts of the project including sensors, microcontroller, driver, motors and blower. It discusses problems faced in the making of the project, testing procedures, applications and future improvements. The report is submitted in partial fulfillment of requirements for a bachelor's degree in electronics and communication engineering.
MINI PROJECT ON CELLPHONE DETECTOR
This handy, it can be used to prevent use of mobile phones in examination halls, confidential rooms and, etc. It is also useful for detecting the use of mobile phone for Spying and unauthorized video transmission. The circuit can detect the incoming calls pocket-size mobile transmission detector or sniffer can sense the presence of an activated mobile cell phone from a distance of one and-a-half meters. So and also outgoing calls, SMS and video transmissions even if the mobile phone is kept in the silent mode. The moment the Bug detects RF transmission signal from an activated mobile phone, it starts sounding a beep alarm and the LED blinks. The alarm continues until the signal transmission ceases. The capacitor C3 should have a lead length of 18 mm with lead spacing of 8 mm. we have to carefully solder the capacitor in standing position with equal spacing of the leads. The response can be optimized by trimming the lead length of C3 for the desired frequency. We are using a short telescopic type antenna. The unit will give the warning indication if someone uses Mobile phone within a radius of 1.5 meters.
State of the Word 2011
The document discusses the benefits of exercise for both physical and mental health. It notes that regular exercise can reduce the risk of diseases like heart disease and diabetes, improve mood, and reduce feelings of stress and anxiety. The document recommends that adults get at least 150 minutes of moderate exercise or 75 minutes of vigorous exercise per week to gain these benefits.
Slideshare ppt
Miss goodheart created a PowerPoint to test out the Slideshare tool, which was introduced to her by Sharon Tonner on January 20th, 2011.
A Guide to SlideShare Analytics - Excerpts from Hubspot's Step by Step Guide ...
This document provides a summary of the analytics available through SlideShare for monitoring the performance of presentations. It outlines the key metrics that can be viewed such as total views, actions, and traffic sources over different time periods. The analytics help users identify topics and presentation styles that resonate best with audiences based on view and engagement numbers. They also allow users to calculate important metrics like view-to-contact conversion rates. Regular review of the analytics insights helps users improve future presentations and marketing strategies.
Viewers also liked (15)
How to build a robot with an arduino and 8051 microcontroller
How to build a robot with an arduino and 8051 microcontroller
Zigbee based metal detecting robot to assist bomb detection and rescue team
Zigbee based metal detecting robot to assist bomb detection and rescue team
AUTOMATED METAL DETECTOR ROBOTIC VEHICLE WITH MANUAL CONTROL USING BLUETOOTH
AUTOMATED METAL DETECTOR ROBOTIC VEHICLE WITH MANUAL CONTROL USING BLUETOOTH
A Guide to SlideShare Analytics - Excerpts from Hubspot's Step by Step Guide ...
A Guide to SlideShare Analytics - Excerpts from Hubspot's Step by Step Guide ...
Similar to Autonomous metal search,collect and collision avoidance robot
371275588.pptx
This document describes the design and implementation of an obstacle avoiding robot using an Arduino microcontroller. It includes a list of hardware components like the Arduino Uno, ultrasonic sensor, motor driver IC, servo motor and chassis. The circuit diagram and code are provided to explain how the Arduino controls the ultrasonic sensor, servo motor and motors to enable the robot to detect obstacles within 15cm and navigate around them. Applications of such robots include automated vacuuming, navigation in hazardous environments, and more.
Arduino Based Project.pptx
This document describes an Arduino-based obstacle avoiding robotic car. The car uses an ultrasonic sensor to detect obstacles and a micro servo to allow the sensor to scan the environment. It includes a motor shield and DC motors to control movement. The Arduino board processes sensor readings and sends signals to move around obstacles. Components are powered by a 9V battery. The goal is to autonomously navigate environments without human intervention.
pdf-obstacle-avoiding-robot.docx
1) The document describes an obstacle avoiding robot project built using an Arduino Uno, ultrasonic sensor, motor driver IC, servo motor, geared motors, and chassis.
2) The robot is programmed to continuously measure the distance to obstacles using the ultrasonic sensor and avoid obstacles by rotating or backing up when distances are less than 15cm.
3) Potential applications of obstacle avoiding robots include household vacuuming, dangerous environments where human access is unsafe, and mobile robot navigation systems.
Arduino Uno Board - Robomart
The Arduino Uno Board is an open resource microcontroller board based on the ATmega328 chip. This Board has 14 digital I/O pins, 6 analog input pins, onboard 16 MHz ceramic resonator, Port for USB connection, Onboard DC power jack, An ICSP header and a microcontroller reset button. Robomart is the biggest selling store in india buy arduino board, buy arduino online, arduino india, arduino uno price, arduino uno india, arduino uno price in india, arduino board price in india at best prices. https://www.robomart.com/arduino-uno-online-india
Self Obstacle Avoiding Rover
A simple project on Obstacle Avoiding Robot is designed here. Robotics is an interesting and fast-growing field. Being a branch of engineering, the applications of robotics are increasing with the advancement of technology.
Zigbee based metal detecting robot to assist bomb detection and rescue team
This document describes a project to create a remote-controlled robot for bomb detection and rescue operations. The robot will use a metal detector, GPS, and wireless communication over Zigbee to locate bombs and transmit the position to rescuers. It will be controlled by an ARM7 microcontroller and can detect bombs without putting lives at risk. The project aims to develop an affordable, unmanned solution to improve bomb detection and rescue efforts.
Radar Using Arduino
Rader is an object detection system. It uses Microwaves to determine the range, altitude, direction, or speed of objects. The radar can transmit radio waves or microwaves which bounce off any object in their path. So, we can easily determine any object in the radar range. Adruino is a single-board microcontroller to make electronics more discipline. The radar system has different performance specifications and also it comes in a verity of size.
An Arduino radar project is more than a visual project because of its circuit implementation. There are different hardware use to accomplish the Arduino Radar Sensor. Like as, Arduino UNO. HC-SRo4 Ultrasonic Sensor including a Servo Motor. The main appearance is the visual narration in the Processing Application.
It is very simple, the Ultrasonic Sensor collects the object information with the help of Arduino and passes it to Processing Application. In the processing application, there is a simple Graphics application implemented which mimic a radar screen.
Rangefinder ppt
This document summarizes a presentation on a short range radar system called RANGEFINDER. It describes the components used including an Arduino Uno, ultrasonic sensor, and servo motor. It explains how the radar works by transmitting radio waves and detecting their reflection to determine an object's distance and direction. Programming in Arduino IDE and Processing were used to control the components and display the radar readings visually.
OBSTACLE_AVOIDING_ROBOT.pptx
This project aims to build an autonomous obstacle avoidance vehicle using ultrasonic sensors. The vehicle is controlled by a microcontroller and can sense obstacles, avoid them, and find an obstacle-free path on its own. Ultrasonic sensors detect surroundings in real-time and allow the vehicle to move toward its target area while avoiding obstacles. The vehicle is designed using an Arduino Uno microcontroller, ultrasonic sensors, a motor driver, DC motors, and other hardware components to achieve autonomous navigation.
Automotive report
voice control robot using arduino,Bluetooth module and android application to driving it forward , backward,turn right,turn left,stop or automatic work to avoid obstacles with ultra-sonic sensor fixed on servo motor to detect distance in forward,right and left.
Bluetooth controller Human detection car.
This document describes a student project to create an Android-controlled car that can detect humans. The project uses a PIR sensor to detect humans, an ultrasonic sensor to detect obstacles, and a Bluetooth module to control the car remotely from an Android phone. The car is built using an Arduino Mega microcontroller and includes DC motors, a motor driver, and other hardware. The goal is to design a system that can detect humans for security purposes and transmit a live video stream of its surroundings.
Obstacle avoiding robot(Lab report)
This project report describes an obstacle avoiding robot created by a student group. The robot uses an ultrasonic sensor to detect obstacles in its path and a microcontroller to control two motors to navigate around obstacles. When the sensor detects an obstacle within 20cm, the microcontroller directs the robot to turn left. Otherwise, it moves straight. The report provides details on the robot's design, components, circuit diagram, algorithm, and testing process. It also discusses potential applications and future improvements.
Understanding robotics: Introductory Event | GDSC RCCIIT
A workshop to introduce everyone to manual robots, autonomous robots and robotic circuits while delving into the world of IoT with fun quiz segments and prizes.
Obstacle observing
The document describes an obstacle observing robot that uses infrared sensors to detect obstacles and avoid them. It consists of an ATmega8 microcontroller, infrared sensors, a motor driver, and motors. The infrared sensors transmit and receive signals to detect obstacles. When an obstacle is detected, the robot diverts itself to move around the obstacle without human guidance. It is designed to autonomously navigate an area while avoiding obstacles.
Collision detector and avoidance robot
collision detector and avoidance robot.....
this presentation is based on collision detector and avoidance robot.....
in which the graphical representation are given about their costs the components which are required in it and their introduction
the main component arduino uno and ultrasonic sensor which sketches are given in the slides and their introduction..
the circuit diagram are also given in the slides which is very helpful,
Impediment detection robot using Arduino
Obstacle Detection robot detects the obstacle to avoid collision using ultrasonic sensor. The motors are connected through motor driver IC to microcontroller , to control the speed PWM is used.
Line Follower Robot
A line follower robot is designed to follow a predetermined path marked by a physical line or other markers. Various sensing schemes can detect these markers, ranging from simple low-cost line sensors to complex vision systems. Line follower robots are commonly used in manufacturing plants to move along specified paths and pick up and place components. They work by using sensors to detect the line path and feedback mechanisms to stay on course while correcting deviations.
Automatic railway gate control using arduino uno
This document describes an automatic railway gate control system using Arduino Uno. The system uses IR sensors to detect the arrival and departure of trains. When a train is detected, the system closes the railway gate automatically using servo or DC motors controlled by the Arduino. Buzzers notify people trying to cross the gate that it is closing. The system aims to prevent accidents at unmanned railway crossings by automating gate operation instead of manual control. The hardware components include an Arduino Uno, IR sensors, motors, buzzers and more. The system is programmed using Arduino C code.
Aman Khan's PPT FILE.pptx
Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d bsbd d dbdbdbd dhsjsbs dbsbd d snsns s sbshzbsbshsd. D dhdbd d d dhhdd d ddbbdbdx. Xbshsbs s Sjsjsjjsjsks
S
Skssdf
D
F
R
R
R
Rr
Rr r r r r. Rr. R r f rrjjeje d djsjs d d djsns. Dd djhd dhdbd d dbdhdhdbd dbdhd d dhhdirirjr rbrbr r f d d d
batch 7.pptx
This document summarizes the improvements, parts purchased, and testing for an autonomous guided vehicle (AGV) obstacle avoidance system using Arduino. It was improved by using two Arduinos instead of one for lower cost. Parts purchased included Arduino Unos, ultrasonic sensors, IR sensors, and DC gear motors. The ultrasonic sensors were tested with a trial program to read their distances and trigger LEDs if obstacles were detected within certain ranges in front, left, or right.
Similar to Autonomous metal search,collect and collision avoidance robot (20)
Zigbee based metal detecting robot to assist bomb detection and rescue team
Zigbee based metal detecting robot to assist bomb detection and rescue team
Understanding robotics: Introductory Event | GDSC RCCIIT
Understanding robotics: Introductory Event | GDSC RCCIIT
Recently uploaded
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Sinan from the Delivery Hero mobile infrastructure engineering team shares a deep dive into performance acceleration with Gradle build cache optimizations. Sinan shares their journey into solving complex build-cache problems that affect Gradle builds. By understanding the challenges and solutions found in our journey, we aim to demonstrate the possibilities for faster builds. The case study reveals how overlapping outputs and cache misconfigurations led to significant increases in build times, especially as the project scaled up with numerous modules using Paparazzi tests. The journey from diagnosing to defeating cache issues offers invaluable lessons on maintaining cache integrity without sacrificing functionality.
Null Bangalore | Pentesters Approach to AWS IAM
#Abstract:
- Learn more about the real-world methods for auditing AWS IAM (Identity and Access Management) as a pentester. So let us proceed with a brief discussion of IAM as well as some typical misconfigurations and their potential exploits in order to reinforce the understanding of IAM security best practices.
- Gain actionable insights into AWS IAM policies and roles, using hands on approach.
#Prerequisites:
- Basic understanding of AWS services and architecture
- Familiarity with cloud security concepts
- Experience using the AWS Management Console or AWS CLI.
- For hands on lab create account on [killercoda.com](https://killercoda.com/cloudsecurity-scenario/)
# Scenario Covered:
- Basics of IAM in AWS
- Implementing IAM Policies with Least Privilege to Manage S3 Bucket
- Objective: Create an S3 bucket with least privilege IAM policy and validate access.
- Steps:
- Create S3 bucket.
- Attach least privilege policy to IAM user.
- Validate access.
- Exploiting IAM PassRole Misconfiguration
-Allows a user to pass a specific IAM role to an AWS service (ec2), typically used for service access delegation. Then exploit PassRole Misconfiguration granting unauthorized access to sensitive resources.
- Objective: Demonstrate how a PassRole misconfiguration can grant unauthorized access.
- Steps:
- Allow user to pass IAM role to EC2.
- Exploit misconfiguration for unauthorized access.
- Access sensitive resources.
- Exploiting IAM AssumeRole Misconfiguration with Overly Permissive Role
- An overly permissive IAM role configuration can lead to privilege escalation by creating a role with administrative privileges and allow a user to assume this role.
- Objective: Show how overly permissive IAM roles can lead to privilege escalation.
- Steps:
- Create role with administrative privileges.
- Allow user to assume the role.
- Perform administrative actions.
- Differentiation between PassRole vs AssumeRole
Try at [killercoda.com](https://killercoda.com/cloudsecurity-scenario/)
AI + Data Community Tour - Build the Next Generation of Apps with the Einstei...
AI + Data Community Tour - Build the Next Generation of Apps with the Einstei...Paris Salesforce Developer Group
Build the Next Generation of Apps with the Einstein 1 Platform.
Rejoignez Philippe Ozil pour une session de workshops qui vous guidera à travers les détails de la plateforme Einstein 1, l'importance des données pour la création d'applications d'intelligence artificielle et les différents outils et technologies que Salesforce propose pour vous apporter tous les bénéfices de l'IA.一比一原版(osu毕业证书)美国俄勒冈州立大学毕业证如何办理
原版一模一样【微信:741003700 】【(osu毕业证书)美国俄勒冈州立大学毕业证成绩单】【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】外观非常简单,由纸质材料制成,上面印有校徽、校名、毕业生姓名、专业等信息。
办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】格式相对统一,各专业都有相应的模板。通常包括以下部分:
校徽:象征着学校的荣誉和传承。
校名:学校英文全称
授予学位:本部分将注明获得的具体学位名称。
毕业生姓名:这是最重要的信息之一,标志着该证书是由特定人员获得的。
颁发日期:这是毕业正式生效的时间,也代表着毕业生学业的结束。
其他信息:根据不同的专业和学位,可能会有一些特定的信息或章节。
办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】价值很高,需要妥善保管。一般来说,应放置在安全、干燥、防潮的地方,避免长时间暴露在阳光下。如需使用,最好使用复印件而不是原件,以免丢失。
综上所述,办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】是证明身份和学历的高价值文件。外观简单庄重,格式统一,包括重要的个人信息和发布日期。对持有人来说,妥善保管是非常重要的。
Mechanical Engineering on AAI Summer Training Report-003.pdf
Mechanical Engineering PROJECT REPORT ON SUMMER VOCATIONAL TRAINING
AT MBB AIRPORT
一比一原版(爱大毕业证书)爱荷华大学毕业证如何办理
原版一模一样【微信:741003700 】【(爱大毕业证书)爱荷华大学毕业证成绩单】【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
办理(爱大毕业证书)爱荷华大学毕业证【微信:741003700 】外观非常简单,由纸质材料制成,上面印有校徽、校名、毕业生姓名、专业等信息。
办理(爱大毕业证书)爱荷华大学毕业证【微信:741003700 】格式相对统一,各专业都有相应的模板。通常包括以下部分:
校徽:象征着学校的荣誉和传承。
校名:学校英文全称
授予学位:本部分将注明获得的具体学位名称。
毕业生姓名:这是最重要的信息之一,标志着该证书是由特定人员获得的。
颁发日期:这是毕业正式生效的时间,也代表着毕业生学业的结束。
其他信息:根据不同的专业和学位,可能会有一些特定的信息或章节。
办理(爱大毕业证书)爱荷华大学毕业证【微信:741003700 】价值很高,需要妥善保管。一般来说,应放置在安全、干燥、防潮的地方,避免长时间暴露在阳光下。如需使用,最好使用复印件而不是原件,以免丢失。
综上所述,办理(爱大毕业证书)爱荷华大学毕业证【微信:741003700 】是证明身份和学历的高价值文件。外观简单庄重,格式统一,包括重要的个人信息和发布日期。对持有人来说,妥善保管是非常重要的。
Digital Twins Computer Networking Paper Presentation.pptx
A Digital Twin in computer networking is a virtual representation of a physical network, used to simulate, analyze, and optimize network performance and reliability. It leverages real-time data to enhance network management, predict issues, and improve decision-making processes.
Electric vehicle and photovoltaic advanced roles in enhancing the financial p...
Climate change's impact on the planet forced the United Nations and governments to promote green energies and electric transportation. The deployments of photovoltaic (PV) and electric vehicle (EV) systems gained stronger momentum due to their numerous advantages over fossil fuel types. The advantages go beyond sustainability to reach financial support and stability. The work in this paper introduces the hybrid system between PV and EV to support industrial and commercial plants. This paper covers the theoretical framework of the proposed hybrid system including the required equation to complete the cost analysis when PV and EV are present. In addition, the proposed design diagram which sets the priorities and requirements of the system is presented. The proposed approach allows setup to advance their power stability, especially during power outages. The presented information supports researchers and plant owners to complete the necessary analysis while promoting the deployment of clean energy. The result of a case study that represents a dairy milk farmer supports the theoretical works and highlights its advanced benefits to existing plants. The short return on investment of the proposed approach supports the paper's novelty approach for the sustainable electrical system. In addition, the proposed system allows for an isolated power setup without the need for a transmission line which enhances the safety of the electrical network
Object Oriented Analysis and Design - OOAD
This ppt gives detailed description of Object Oriented Analysis and design.
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows.pdf
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows
一比一原版(CalArts毕业证)加利福尼亚艺术学院毕业证如何办理
CalArts毕业证学历书【微信95270640】CalArts毕业证’圣力嘉学院毕业证《Q微信95270640》办理CalArts毕业证√文凭学历制作{CalArts文凭}购买学历学位证书本科硕士,CalArts毕业证学历学位证【实体公司】办毕业证、成绩单、学历认证、学位证、文凭认证、办留信网认证、(网上可查,实体公司,专业可靠)
(诚招代理)办理国外高校毕业证成绩单文凭学位证,真实使馆公证(留学回国人员证明)真实留信网认证国外学历学位认证雅思代考国外学校代申请名校保录开请假条改GPA改成绩ID卡
1.高仿业务:【本科硕士】毕业证,成绩单(GPA修改),学历认证(教育部认证),大学Offer,,ID,留信认证,使馆认证,雅思,语言证书等高仿类证书;
2.认证服务: 学历认证(教育部认证),大使馆认证(回国人员证明),留信认证(可查有编号证书),大学保录取,雅思保分成绩单。
3.技术服务:钢印水印烫金激光防伪凹凸版设计印刷激凸温感光标底纹镭射速度快。
办理加利福尼亚艺术学院加利福尼亚艺术学院毕业证文凭证书流程:
1客户提供办理信息:姓名生日专业学位毕业时间等(如信息不确定可以咨询顾问:我们有专业老师帮你查询);
2开始安排制作毕业证成绩单电子图;
3毕业证成绩单电子版做好以后发送给您确认;
4毕业证成绩单电子版您确认信息无误之后安排制作成品;
5成品做好拍照或者视频给您确认;
6快递给客户(国内顺丰国外DHLUPS等快读邮寄)
-办理真实使馆公证(即留学回国人员证明)
-办理各国各大学文凭(世界名校一对一专业服务,可全程监控跟踪进度)
-全套服务:毕业证成绩单真实使馆公证真实教育部认证。让您回国发展信心十足!
(详情请加一下 文凭顾问+微信:95270640)欢迎咨询!子小伍玩小伍比山娃小一岁虎头虎脑的很霸气父亲让山娃跟小伍去夏令营听课山娃很高兴夏令营就设在附近一所小学山娃发现那所小学比自己的学校更大更美操场上还铺有塑胶跑道呢里面很多小朋友一班一班的快快乐乐原来城里娃都藏这儿来了怪不得平时见不到他们山娃恍然大悟起来吹拉弹唱琴棋书画山娃都不懂却什么都想学山娃怨自己太笨什么都不会斟酌再三山娃终于选定了学美术当听说每月要交元时父亲犹豫了山娃也说爸算了吧咱学校一学期才转
Gas agency management system project report.pdf
The project entitled "Gas Agency" is done to make the manual process easier by making it a computerized system for billing and maintaining stock. The Gas Agencies get the order request through phone calls or by personal from their customers and deliver the gas cylinders to their address based on their demand and previous delivery date. This process is made computerized and the customer's name, address and stock details are stored in a database. Based on this the billing for a customer is made simple and easier, since a customer order for gas can be accepted only after completing a certain period from the previous delivery. This can be calculated and billed easily through this. There are two types of delivery like domestic purpose use delivery and commercial purpose use delivery. The bill rate and capacity differs for both. This can be easily maintained and charged accordingly.
Computational Engineering IITH Presentation
This Presentation will give you a brief idea about what Computational Engineering at IIT Hyderabad has to offer.
22CYT12-Unit-V-E Waste and its Management.ppt
Introduction- e - waste – definition - sources of e-waste– hazardous substances in e-waste - effects of e-waste on environment and human health- need for e-waste management– e-waste handling rules - waste minimization techniques for managing e-waste – recycling of e-waste - disposal treatment methods of e- waste – mechanism of extraction of precious metal from leaching solution-global Scenario of E-waste – E-waste in India- case studies.
Recently uploaded (20)
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
AI + Data Community Tour - Build the Next Generation of Apps with the Einstei...
AI + Data Community Tour - Build the Next Generation of Apps with the Einstei...
Mechanical Engineering on AAI Summer Training Report-003.pdf
Mechanical Engineering on AAI Summer Training Report-003.pdf
Digital Twins Computer Networking Paper Presentation.pptx
Digital Twins Computer Networking Paper Presentation.pptx
Electric vehicle and photovoltaic advanced roles in enhancing the financial p...
Electric vehicle and photovoltaic advanced roles in enhancing the financial p...
4. Mosca vol I -Fisica-Tipler-5ta-Edicion-Vol-1.pdf
4. Mosca vol I -Fisica-Tipler-5ta-Edicion-Vol-1.pdf
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows.pdf
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows.pdf
Autonomous metal search,collect and collision avoidance robot
- 2. OVERVIEW Objective Expected output Hardware and software Requirements Module description Advantages and Disadvantages References
- 3. OBJECTIVE The main objective of our project is to build a robotic vehicle that can sense metals ahead of it and to pick it and place it in a pre-estimated place.
- 4. Expected Output It scans the nearby area for obstacles. If no obstacle is detected ,Robot moves forward while scanning for metals. If metals are detected, it collects them.
- 5. Hardware & Software Requirements Hardware Software Robot Chassis Arduino IDE DC motors Fritzing Motor Driver MS-Powerpoint Arduino Uno Ultrasonic sensor Servo Motors Castor wheel Pvc pipes, round block Inductive proximity sensor(M30) Electromagnet Batteries
- 8. The project is divided into modules for better understanding of the circuit. The modules include Arduino Uno Microcontroller Board Motor Control Driver Metal Detector Ultrasonic Sensor
- 9. Motor Control Driver It is a dual H-bridge driver designed to drive dc motors. It controls the speed and direction of each DC motors independently using the micro controller. It uses L293D IC to control the dc motor It is powered by an external power supply of 5v to 12v.
- 10. Operation of Motor Driver L293D has 2 sets of arrangements where one set has input 1 and output 2 and other set has input 3,input 4,output 3 and output 4 If enable 1 and pin number 2 are high leaving pin number 7 as low then motor rotates in forward direction, vice-versa for reverse direction. If enable 2 and pin number 10 are high leaving pin 15 as low then motor rotates in forward direction, vice-versa for reverse direction.
- 11. Microcontroller CPU RAM ROM I/O PORTS TIMER Serial Com Ports It is a smaller computer It has on-chip RAM,ROM,I/O ports
- 12. Arduino Uno Microcontroller Microcontroller - Atmega328 Operating voltage - 5v Pin count - 28 Input Voltage - 7-12v Digital I/O pins - 14(6 pwm) Analog Input Pins - 6 Current per I/O pins - 40mA Current for 3.3 v pins - 50mA Flash memory - 32KB SRAM - 2KB EEPROM - 1KB Clock Speed - 16 MHz
- 13. Ultrasonic Sensor Ultrasonic sensor generates high frequency sound waves and evaluate the echo which is received back by the sensor. It measures the time interval between sending and receiving the echo to determine the distance to an object. It detects the distance of the closest object in front of the sensor(from 2cm to 3m).
- 14. Servo Motors It is used to mount ultrasonic sensor. 2 servo motors are used to control the arm. It has 3 pins Vcc, ground, control signal.
- 15. Arm Control Two servo motors are used to control the arm. Sweep Servo motor is used to scan metals . Flip Servo motor is used to pick the metals.
- 16. Metal Detector It is an inductive proximity sensor. It consists of 3 pins. Vcc (pink),Ground(blue),control(black)
- 17. electromagnet It is a 1.5 kg lifting electromagnet. It has two pins. It is controlled by H-bridge.
- 18. ADVANTAGES Provide safety to the bomb disposal squad by providing an extra line of defence. Reduced amount of operator errors. Can be made to perform even the most dangerous tasks without concern. Can operate without human assistance(i.e. autonomous)
- 19. DISADVANTAGES Precise programming needed. It doesn’t possess pre-programmed path. Robot doesn’t distinguish between small and large pieces of metal. Limited stability
- 20. IMPROVEMENTS Stability can be improved by using 4 wheel configuration. Live video feedback could be implemented. Chain drive can be used to improve the motion of robot in terrain.
- 21. FLOWCHART
- 23. THANK YOU