Downloaded 132 times

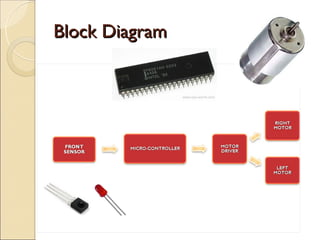
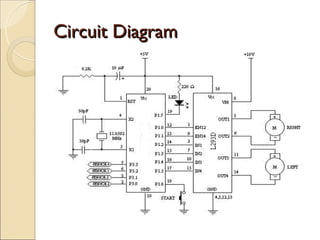
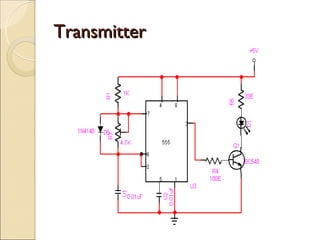
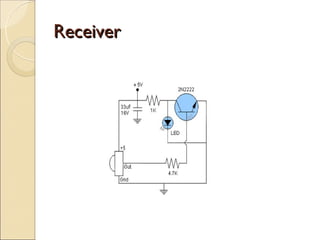
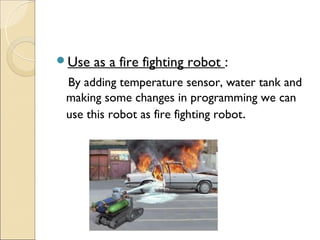




This document describes an obstacle avoiding robot with a vacuum cleaner. The robot uses IR sensors and a microcontroller to detect obstacles and navigate around them while using a blower to function as a vacuum cleaner. It discusses the components, circuit diagram, software, applications and future enhancements such as adding a camera to increase range or modifying it to function as a firefighting robot. The goal is to create a robot that can autonomously clean an area while avoiding obstacles.
















































![ppt mini 1[1].pptxsddwsdssdsdsdsddssdssdsdd](https://cdn.slidesharecdn.com/ss_thumbnails/pptmini11-250815141227-c4368069-thumbnail.jpg?width=640&height=640&fit=bounds)




































