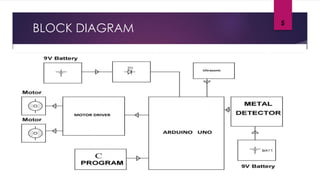
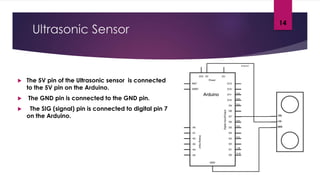
This document proposes a metal detection robot that can detect metals ahead of it and avoid collisions using ultrasonic sensors. The robot uses an Arduino Uno microcontroller board to control two DC motors via a motor driver chip and detect metals using a metal detector coil. Ultrasonic sensors help the robot detect and avoid obstacles to provide a safe metal detecting robot that can operate in hazardous environments.