Downloaded 170 times

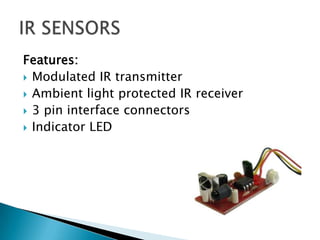
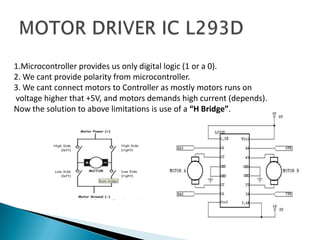
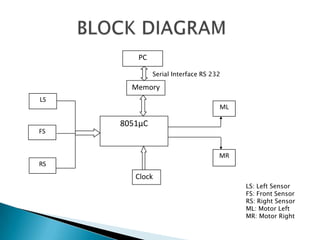
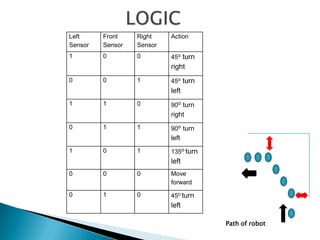

1. The document describes an obstacle avoiding robot that uses an 8051 microcontroller and infrared sensors to detect obstacles and change direction to avoid collisions. 2. It uses a dual full H bridge motor driver and DC motors to change the robot's direction upon detecting an obstacle with its infrared sensors. 3. The robot is capable of automated navigation and obstacle avoidance, making it useful for applications like automated vehicles.