Obstacle_Avoidance_Robot_Coruse_Project_ECET402_Mechatronics_FinalCopy
•Download as DOCX, PDF•
3 likes•758 views

This document describes an obstacle avoidance robot designed and built by Elijah Barner. The robot uses an Arduino Uno microcontroller along with an ultrasonic sensor and motor shield to drive two DC motors. The ultrasonic sensor transmits and receives radio frequency signals to determine the distance to obstacles in front of the robot. The Arduino code translates the sensor signals and controls the motors to maneuver around obstacles by moving forward, backward, or changing directions. Diagrams show the hardware components and signal flow. The appendices provide additional illustrations and definitions of the inputs, outputs, software, and references used.

More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (20)
Similar to Obstacle_Avoidance_Robot_Coruse_Project_ECET402_Mechatronics_FinalCopy
Similar to Obstacle_Avoidance_Robot_Coruse_Project_ECET402_Mechatronics_FinalCopy (20)
Obstacle_Avoidance_Robot_Coruse_Project_ECET402_Mechatronics_FinalCopy
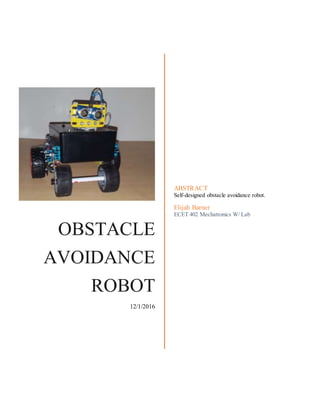
- 1. OBSTACLE AVOIDANCE ROBOT 12/1/2016 ABSTRACT Self-designed obstacle avoidance robot. Elijah Barner ECET 402 Mechatronics W/ Lab
- 2. Table of Contents Table of Illustration………………………………………………………. Pg. 2 and 4 Description of Operation…………………………………………………Pg. 6 Hardware Block Diagrams………………………………………………Pg. 7 and 8 Input/output Definitions………………………………………………….Pg. 9, 10, and 12 Theory of Operations…………………………………………………….Pg. 12 Software and Hardware Operations…………………………………..Pg. 13 Hardware, Implementations, and Findings……………………………..Pg.14 Appendances……………………………………………………………….Pg. 15 References…………………………………………………………………..Pg. 16
- 3. Table of Illustrations A basic illustration of the hardware that was used: Appendix A:
- 4. Appendix B:
- 5. Appendix C:
- 6. Description of Operations This robot was designed and program to work autonomously to avoid and obstacle. For an example if a wall or table is in front of it the ultrasonic sensor broadcast a signal using transmitter radio frequency and wait for the signal to bounce to its receiver. Then the code in C language translate the analog signal from the sensor to the microcontroller. Afterwards the DC motor rotate clockwise or counter clockwise to go forward, backward, and changes directions.
- 7. Hardware Block Diagram I. ARDUINO UNO ADAFRUIT MOTOR SHEILD Motor A Motor B [Ultrasonic Sensor/ Transmitter and Receiver
- 8. Hardware Block Diagram II.
- 9. Input / Output Definition A basic diagram for obstacle avoiding robots showing various input/outputs. Appendix D Power supply: 5 to 12 VDC
- 10. Arduino Uno: Input voltage 5 to 12 VDC Output voltage 3.3 to 5 VDC Processor: AT-Mega 328 14 Inputs/Outputs pins 6 PWM and 6 analog inputs 16 MHz crystal oscillator Supports both SPI and SCI USB to serial bus connection
- 11. DC Motors: 2 to 10 VDC Adafruit Motor Shield: Four bidirectional support for DC motors. Four H-bridge (L2930 chips support 0.6A of current.). Supply voltage 4 to 12 VDC.
- 12. Theory of Operations The theoretical aspects of operations depends on several major things how the ultrasonic sensor interact with the real world. Also that interaction of real-world send an analog signal threw the sensor to the microcontroller threw a feedback system the robot makes a decision on wither or not to react to an obstacle in front of it and avoiding.
- 13. Software and Hardware Operations Arduino interface using C programming: Appendix E Transmission and receiving of the analog signal (RF signal) the robot has to make the decision to avoid the wall/ obstacle in front of it. Black arrow transmission and Yellow indication of receiving.
- 14. Hardware, Implementation, and Findings The Arduino UNOmicrocontroller was used as the main control module. The Parallax ultrasonic sensor that is the transmitter and receiver for analog signal via radio frequency. Purchased both a plastic hardware enclosure to hold all of the hardware and to also work as the chassis. The blue bracket also purchase fromRadioShack are also for the DC motors mount. Servo motor used was to give the robot the ability to scan the surrounding area at angle of 180 degrees in of it also to judge the distancesbased on location of the obstacle.
- 15. Appendices Appendix A, B, C ………………………… Table of Illustration Appendix D……………………………….. Input / Output Definition Appendix E ……………………………….. Software and Hardware Operations