![3. The undisturbed motion
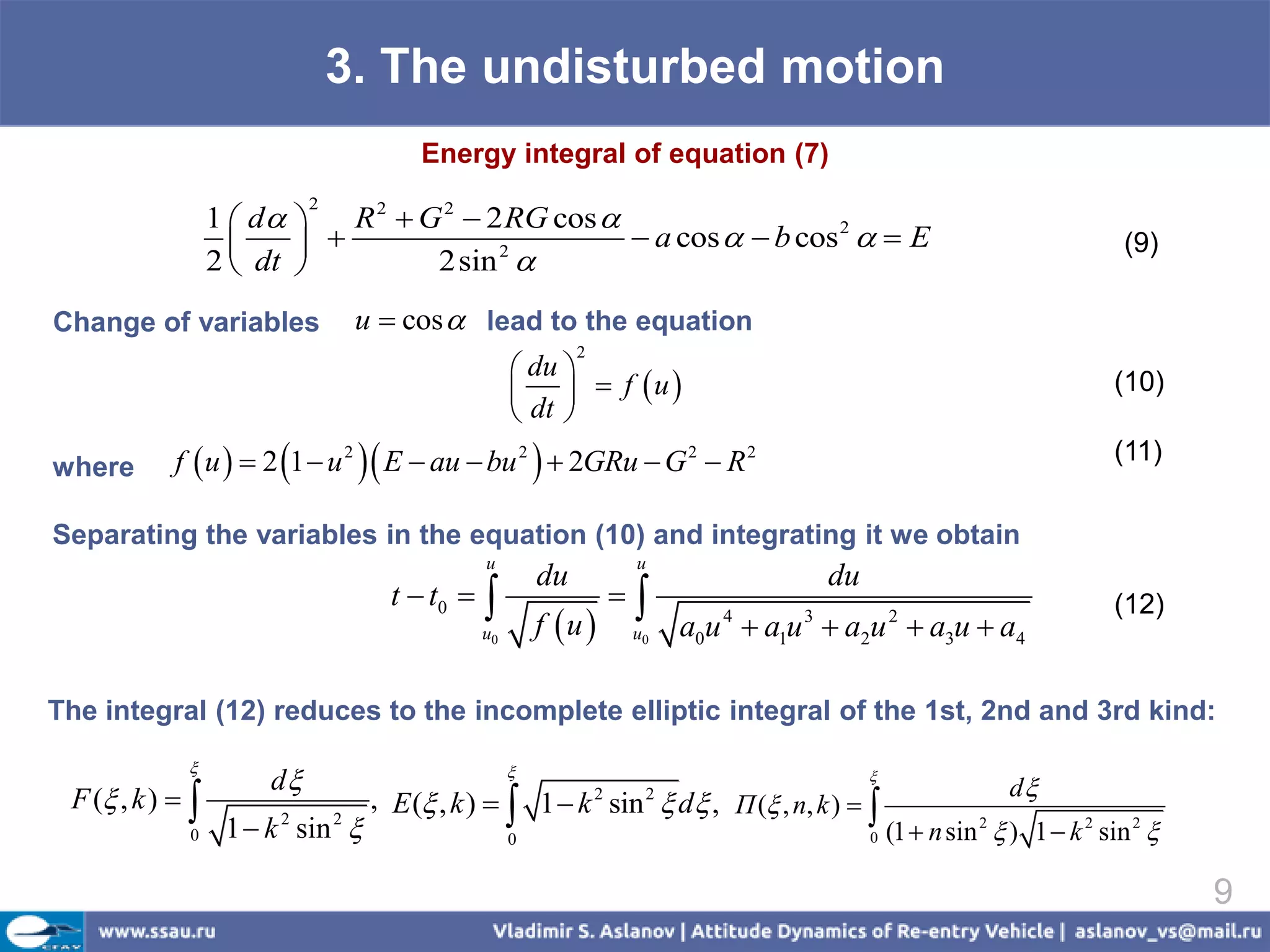
The general solution for m a sin b sin 2
M
cos u L (16)
1 Ncn
t 0, k
where 1, 2 depends on the type roots of the polynomial: f u 0
The angle of proper rotation
[Vadim Serov]
R G R cos t cos
t
0
sin 2 t
dt f ab П t , n1 , k , П t , n2 , k , П n1 , k , П n2 , k
0
Ix
11](https://image.slidesharecdn.com/reentryvehicle2012avs-pdfenc-120309101415-phpapp01/75/Attitude-Dynamics-of-Re-entry-Vehicle-11-2048.jpg)
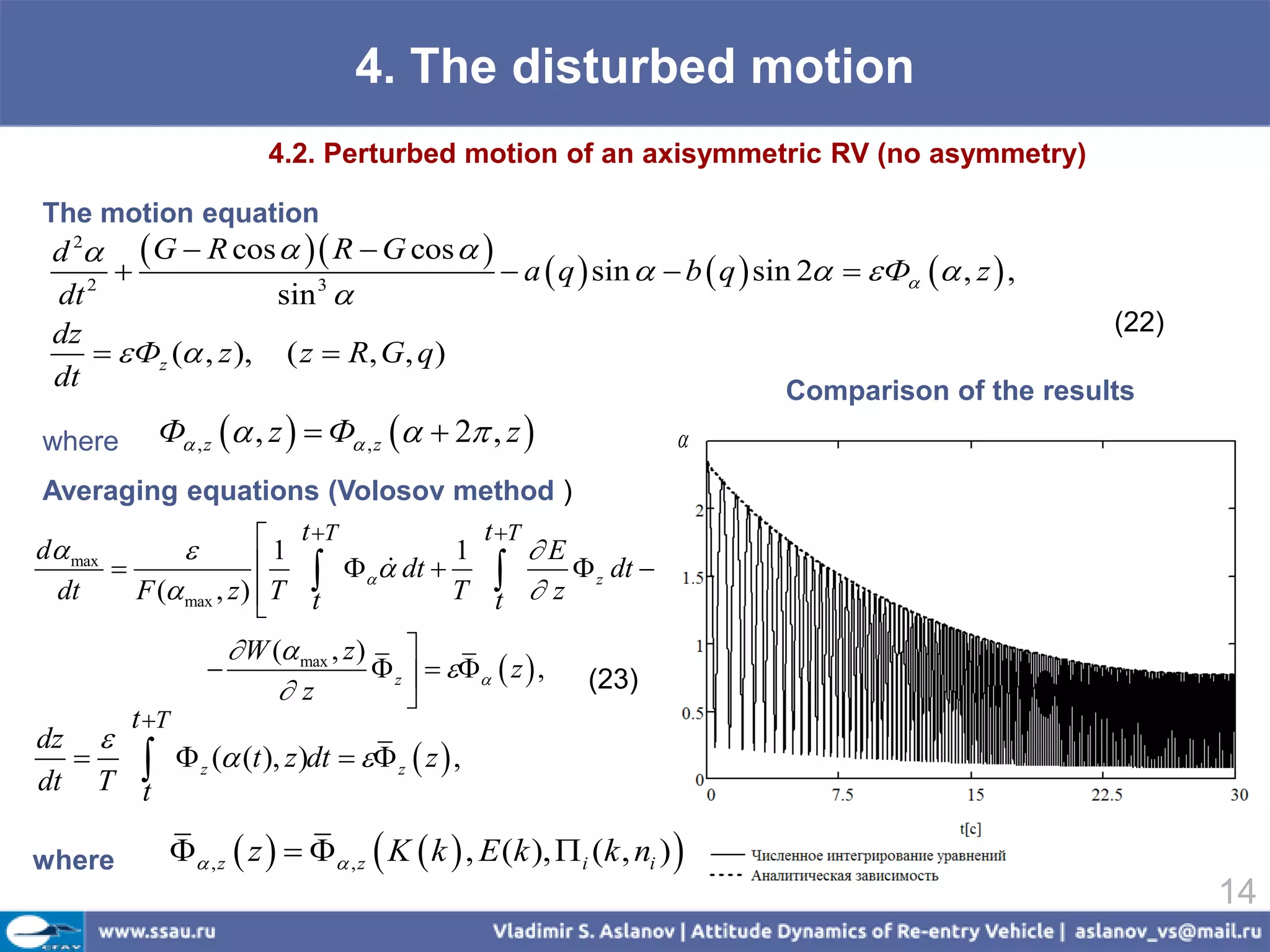
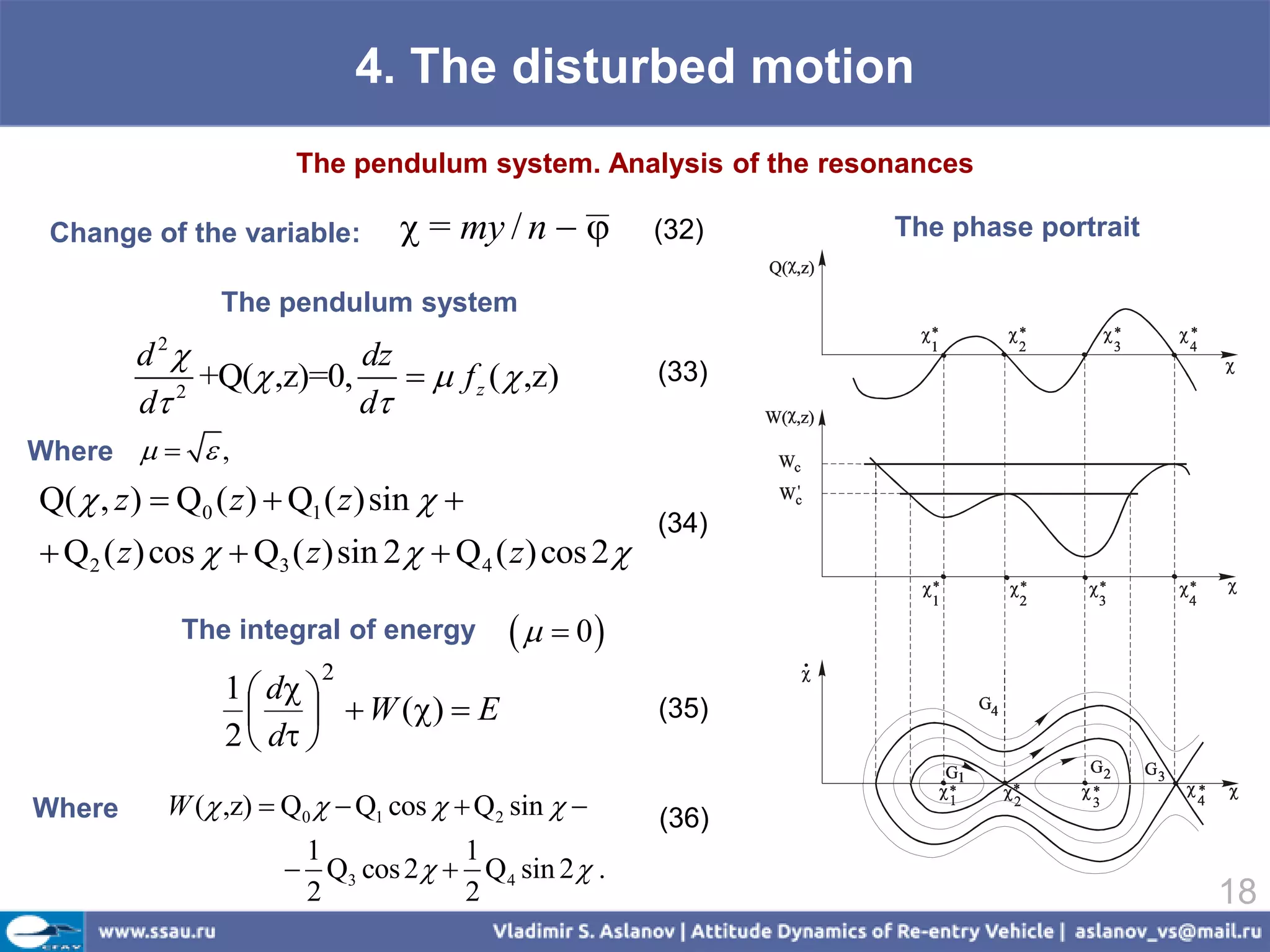
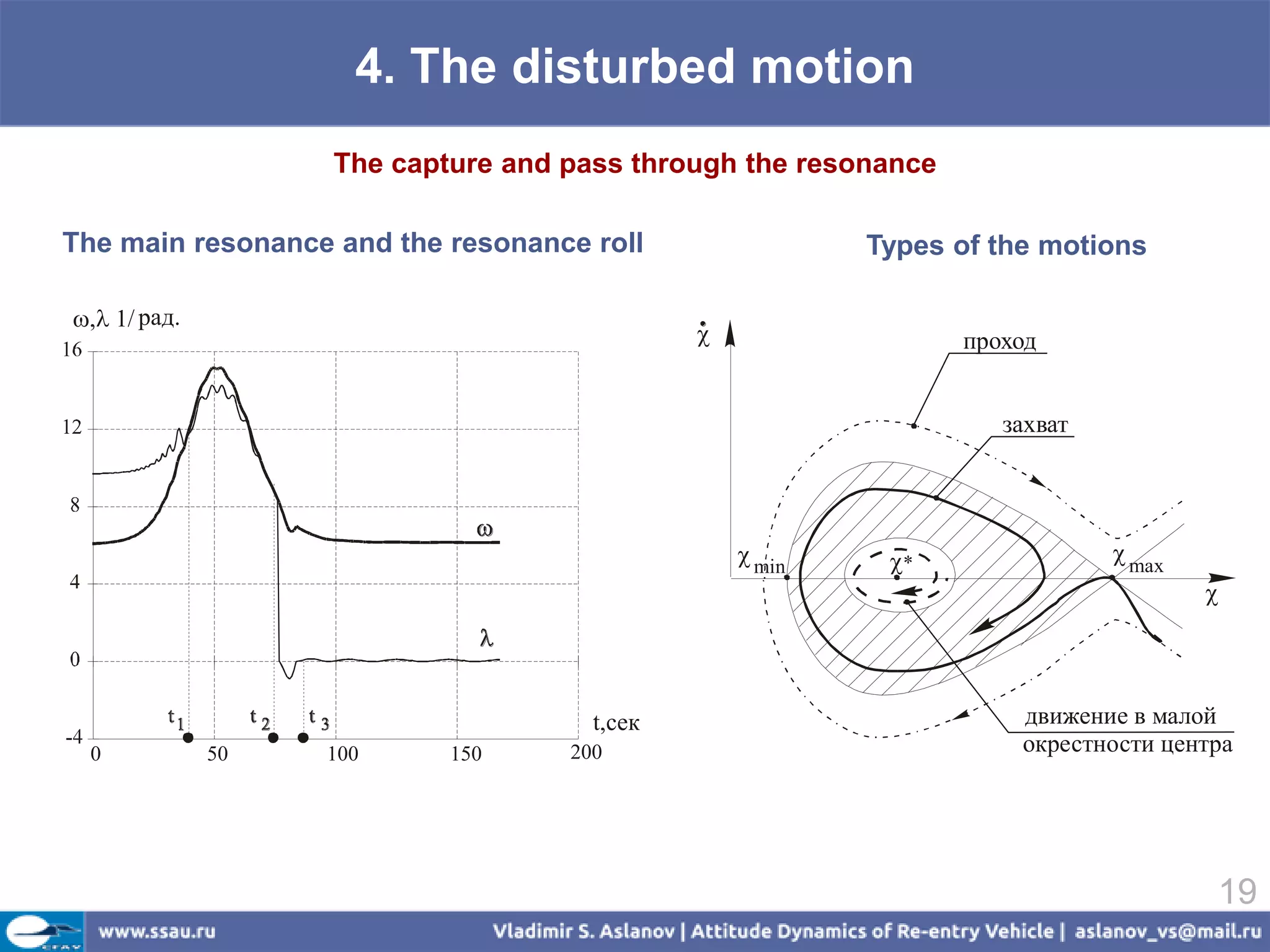
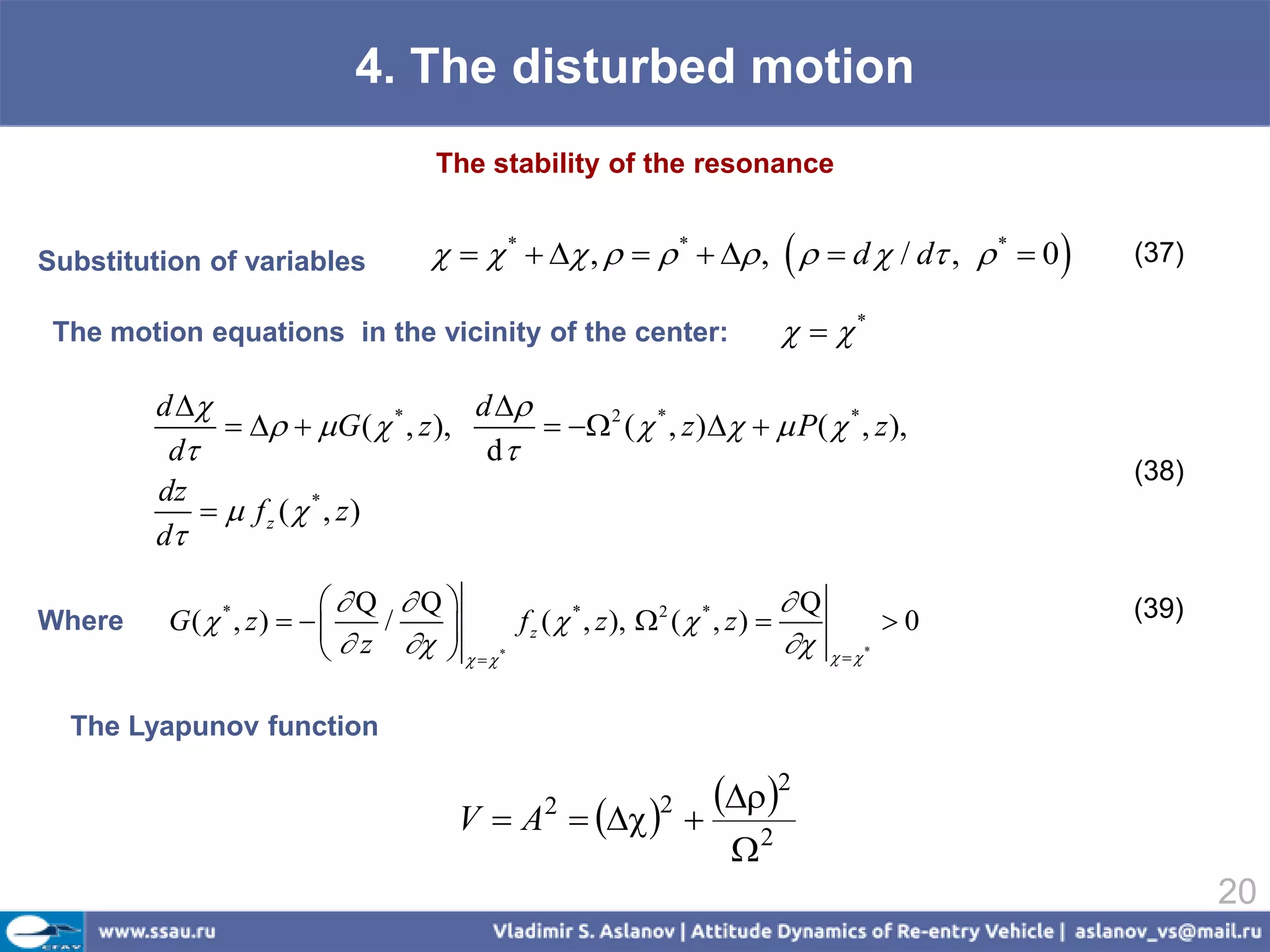
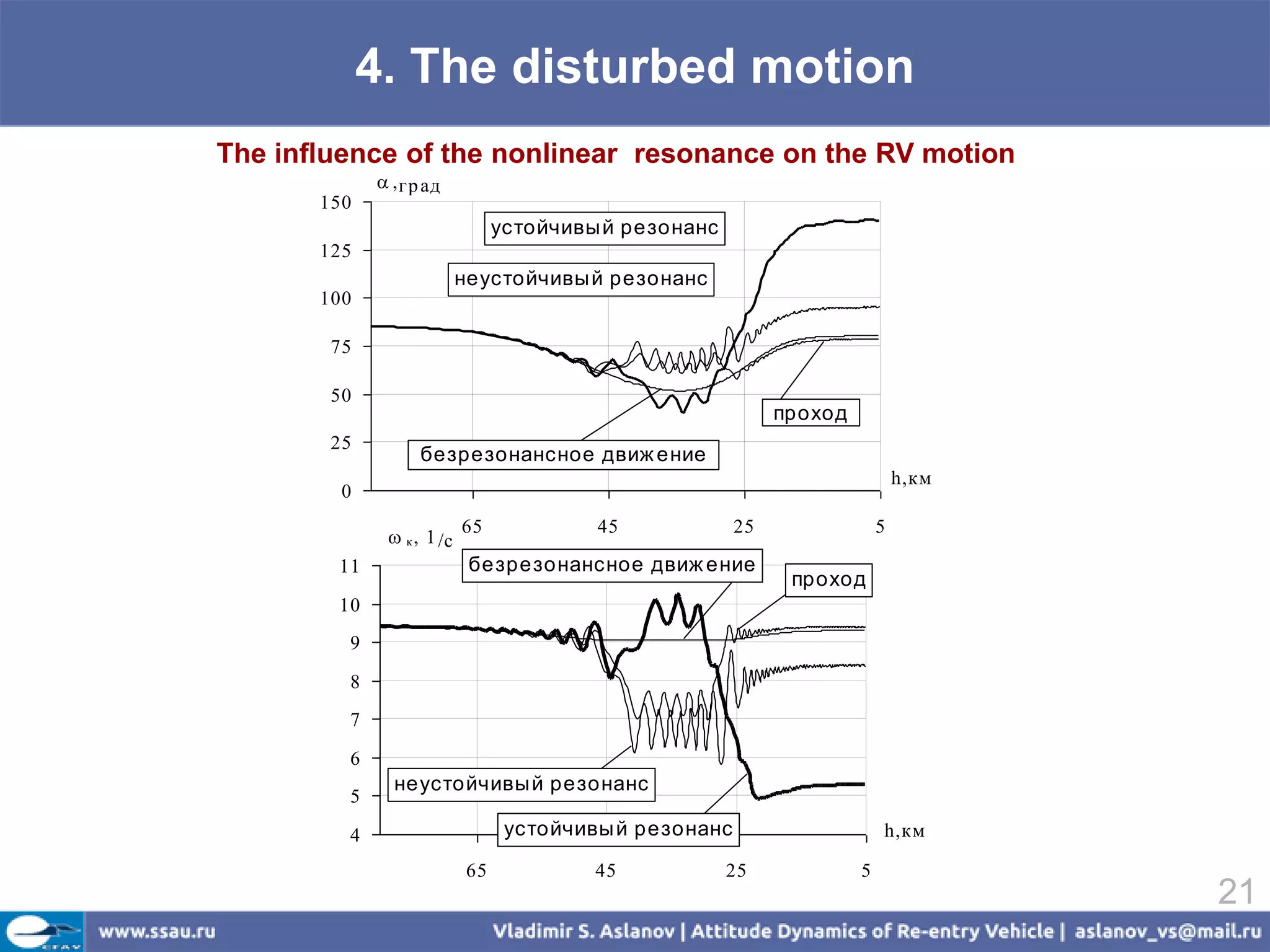
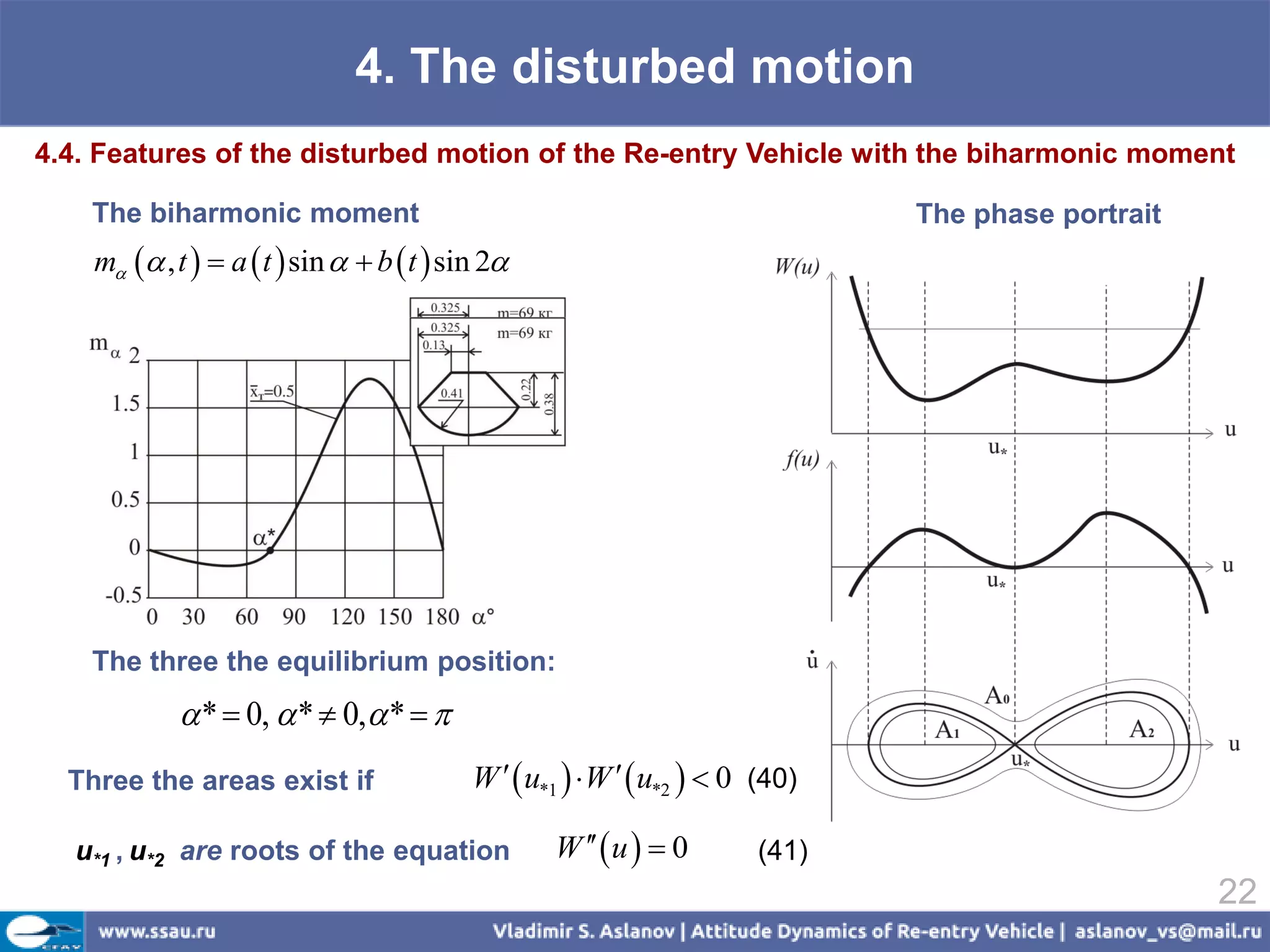
![4. The disturbed motion
A0-stable; A1,A2 - unstable A0-unstable; A1,A2 - stable
A1,A2 – stable if
E ( z ) W* or f* 0 (42)
A0 – stable if
E ( z ) W* or f* 0 (43)
E - average value of the total energy, calculated in neighborhood separatrix
W* - value of the potential energy, calculated at the saddle point u=u*
f f (u , z ) 2(1 u 2 )[ E ( z ) W (u , z )] O( 2 ) (44)
* * * *
23](https://image.slidesharecdn.com/reentryvehicle2012avs-pdfenc-120309101415-phpapp01/75/Attitude-Dynamics-of-Re-entry-Vehicle-23-2048.jpg)
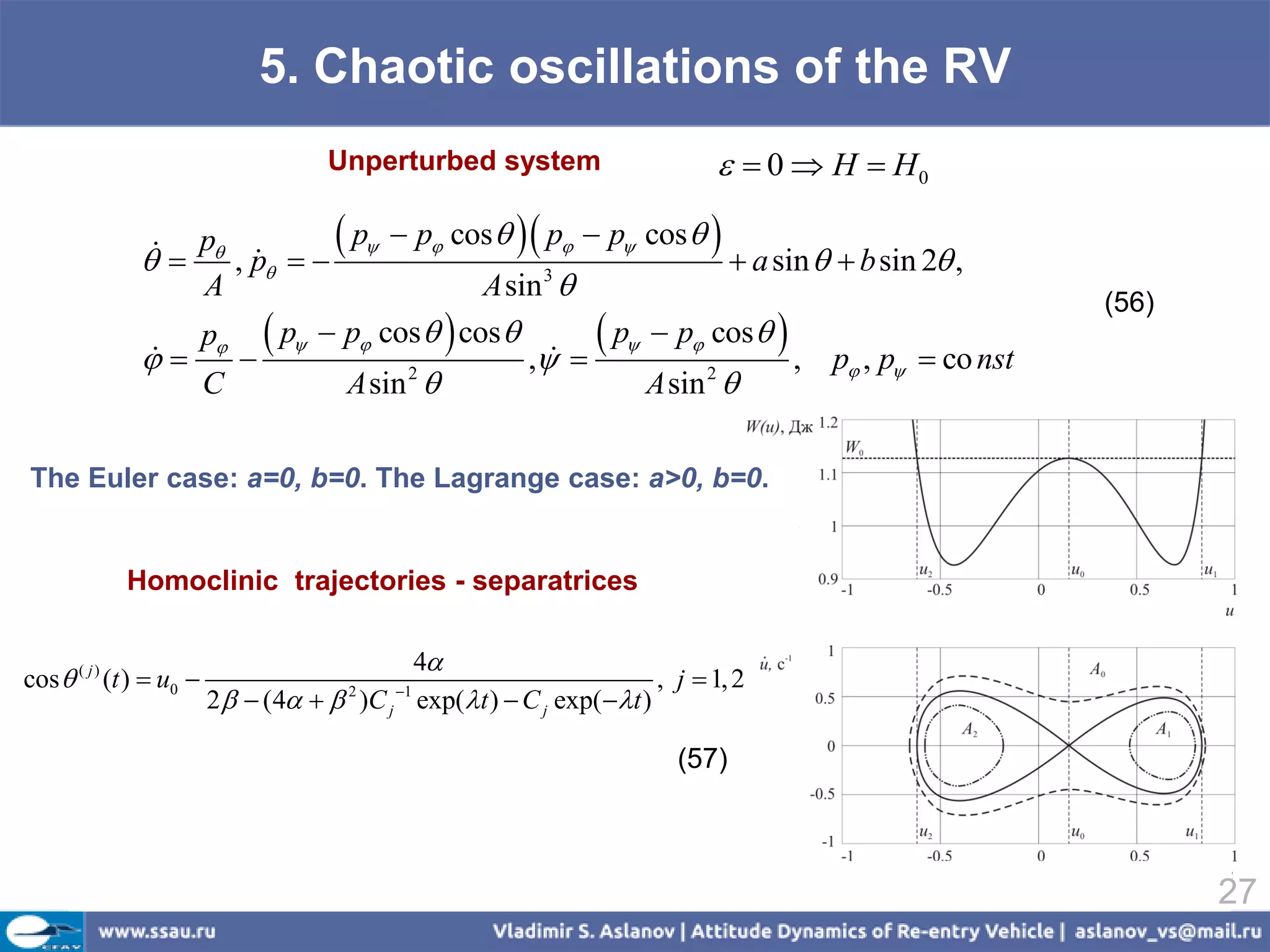
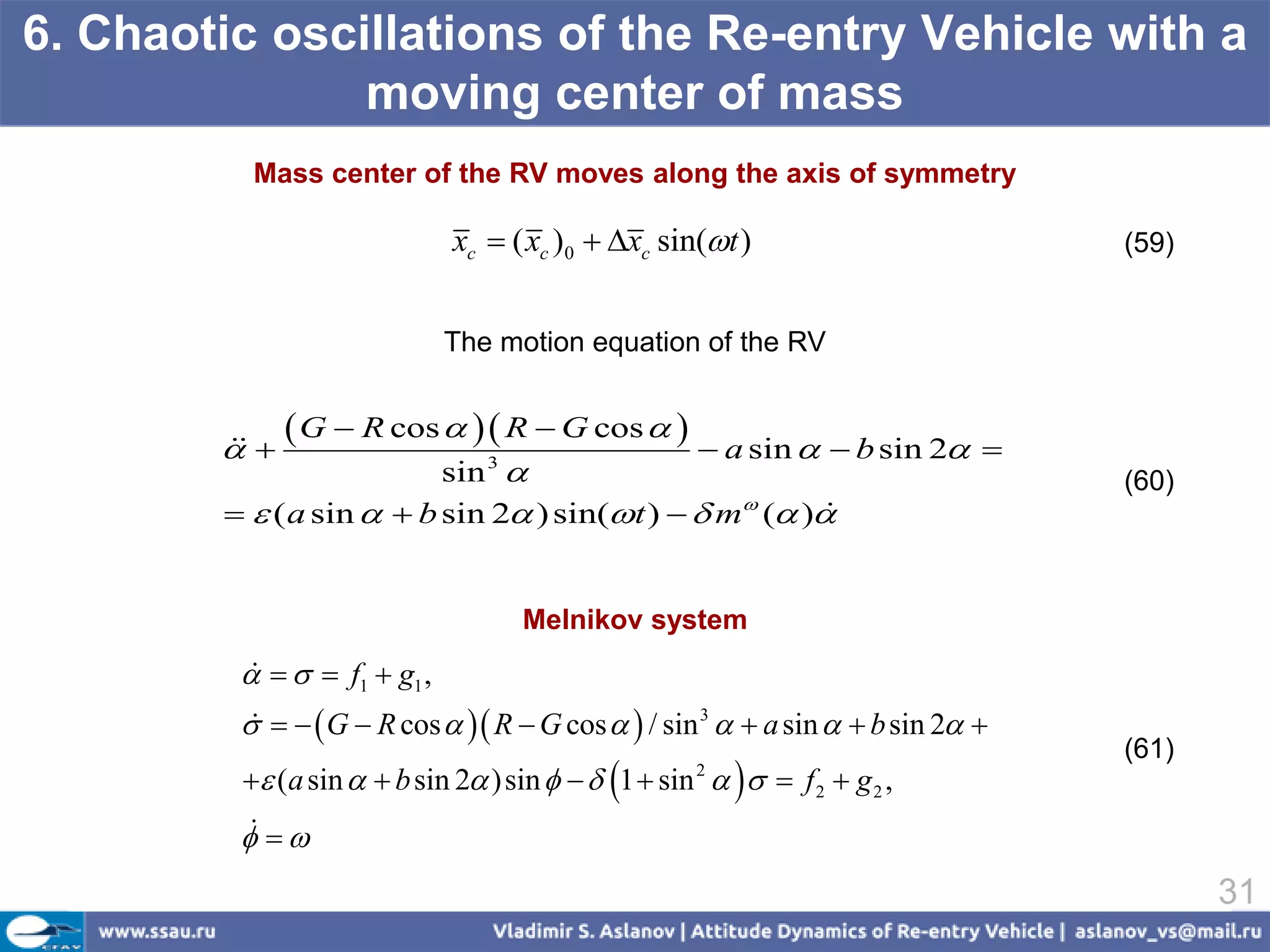
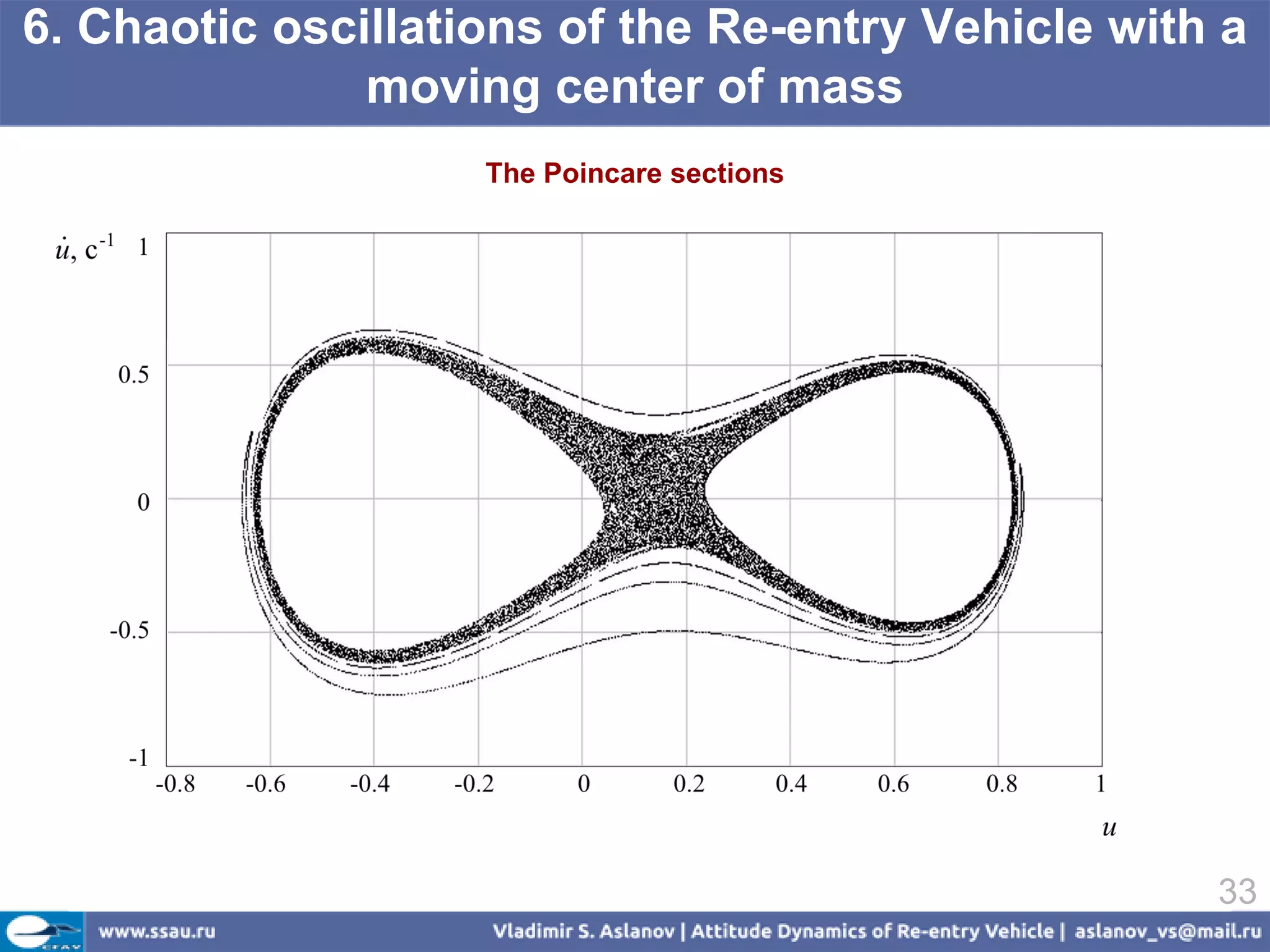
![6. Chaotic oscillations of the Re-entry Vehicle with a
moving center of mass
The homoclinic trajectories
4
cos ( j ) (t ) u0 , j 1, 2 (62)
2 (4 )C j exp(t ) C j exp( t )
2 1
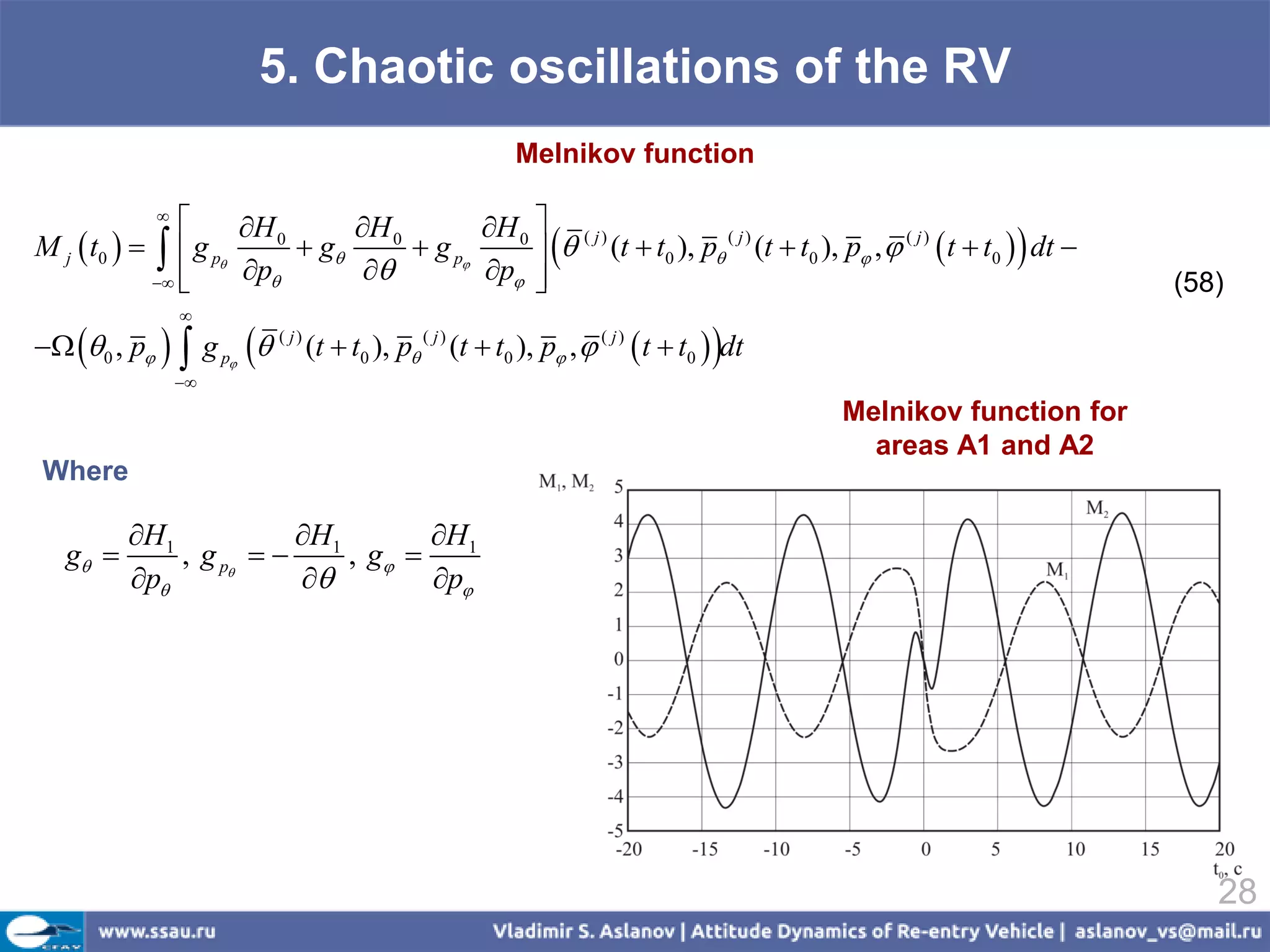
Melnikov function
M (t0 , 0 ) { f1[qi ) (t )] g2[qi ) (t ), t t0 0 ]}dt M (i ) M (i )
(i )
( (
(63)
где M i ) (a sin i ) b sin 2 i ) ) sin(t t0 0 )dt ,
(i ) ( ( (
(64)
M (1 sin )( ) dt
(i ) 2 (i )
(i ) 2
The absence condition of the chaos
M(i ) M (i ) (65)
32](https://image.slidesharecdn.com/reentryvehicle2012avs-pdfenc-120309101415-phpapp01/75/Attitude-Dynamics-of-Re-entry-Vehicle-32-2048.jpg)
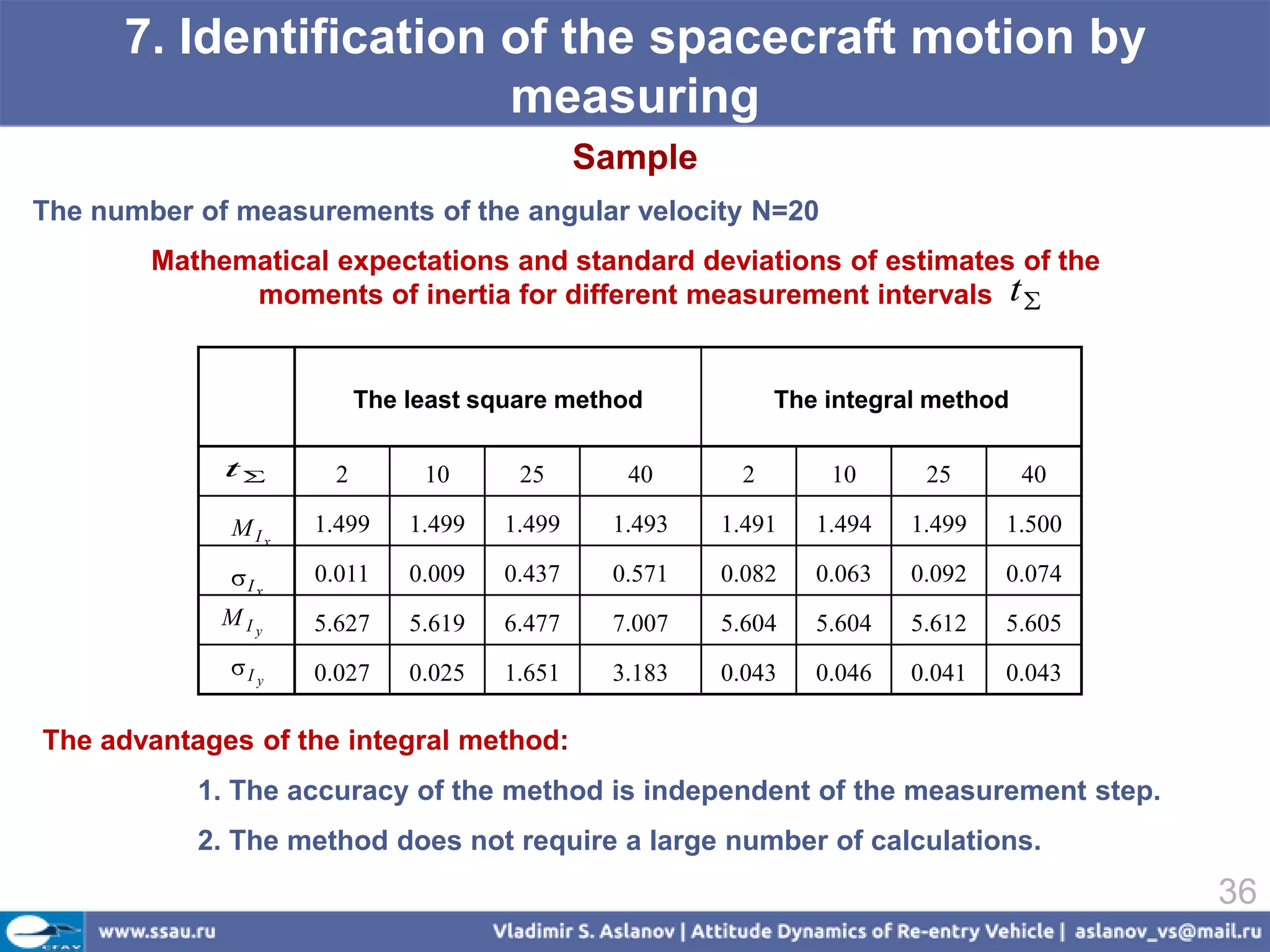
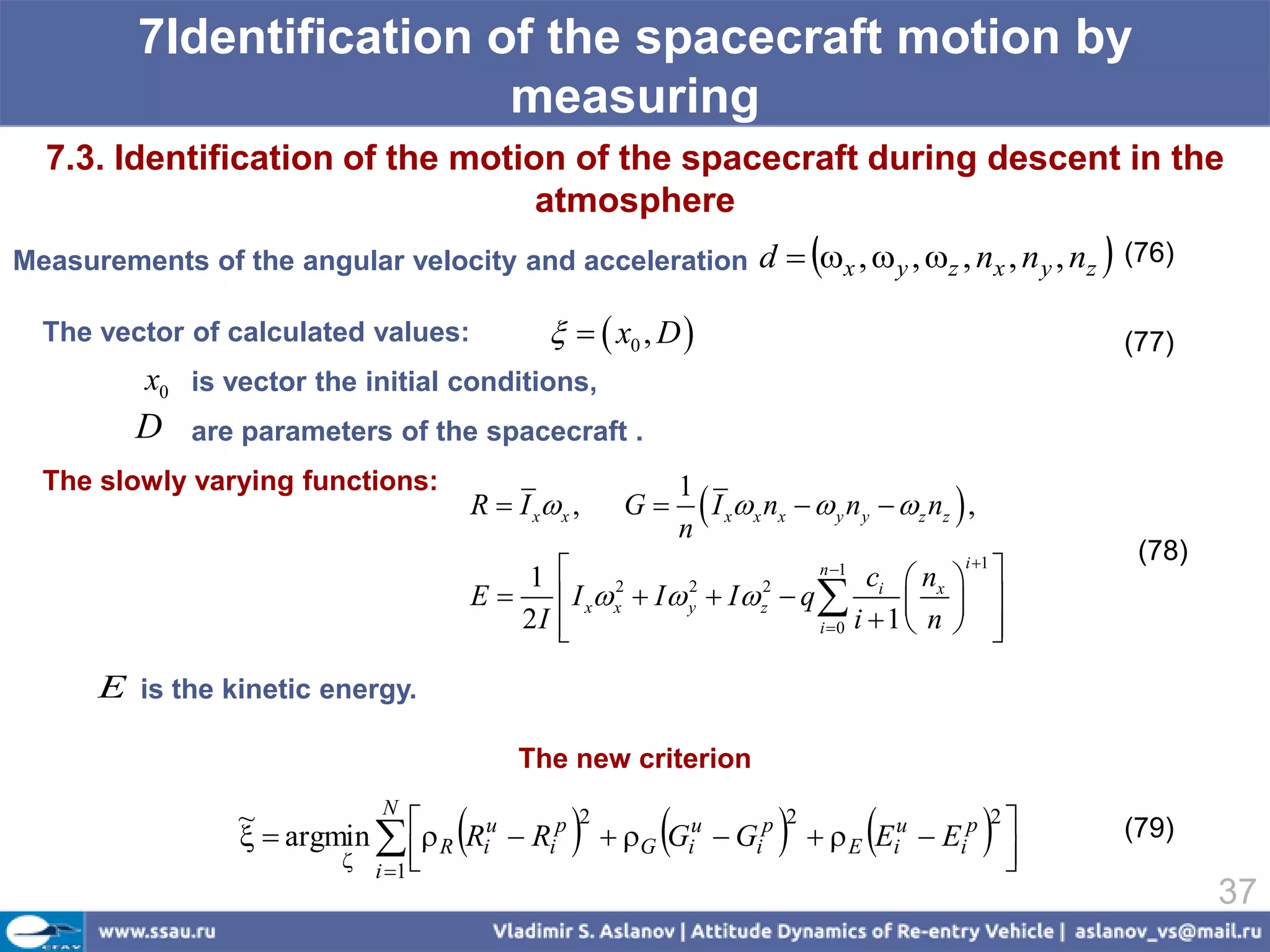
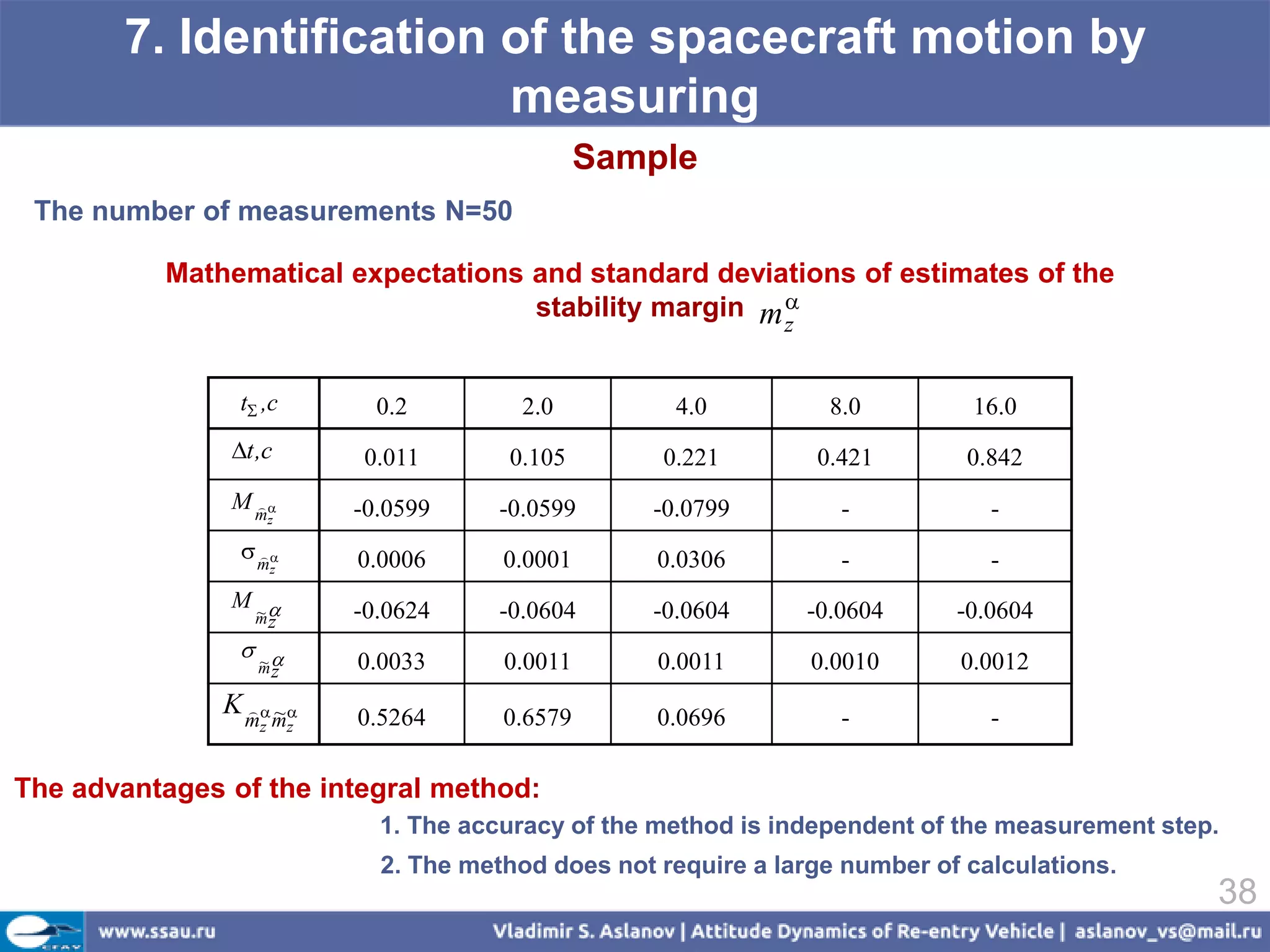

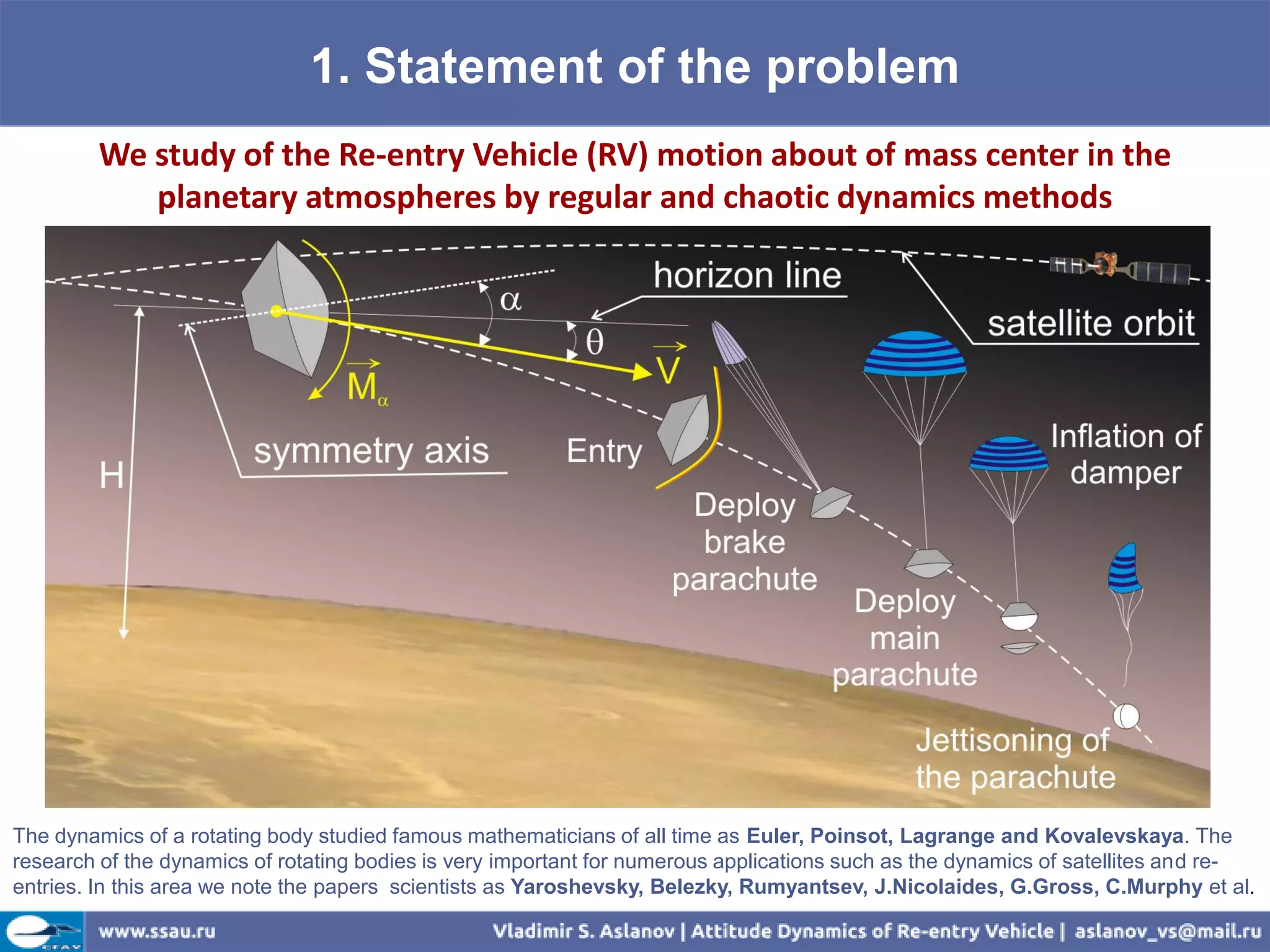
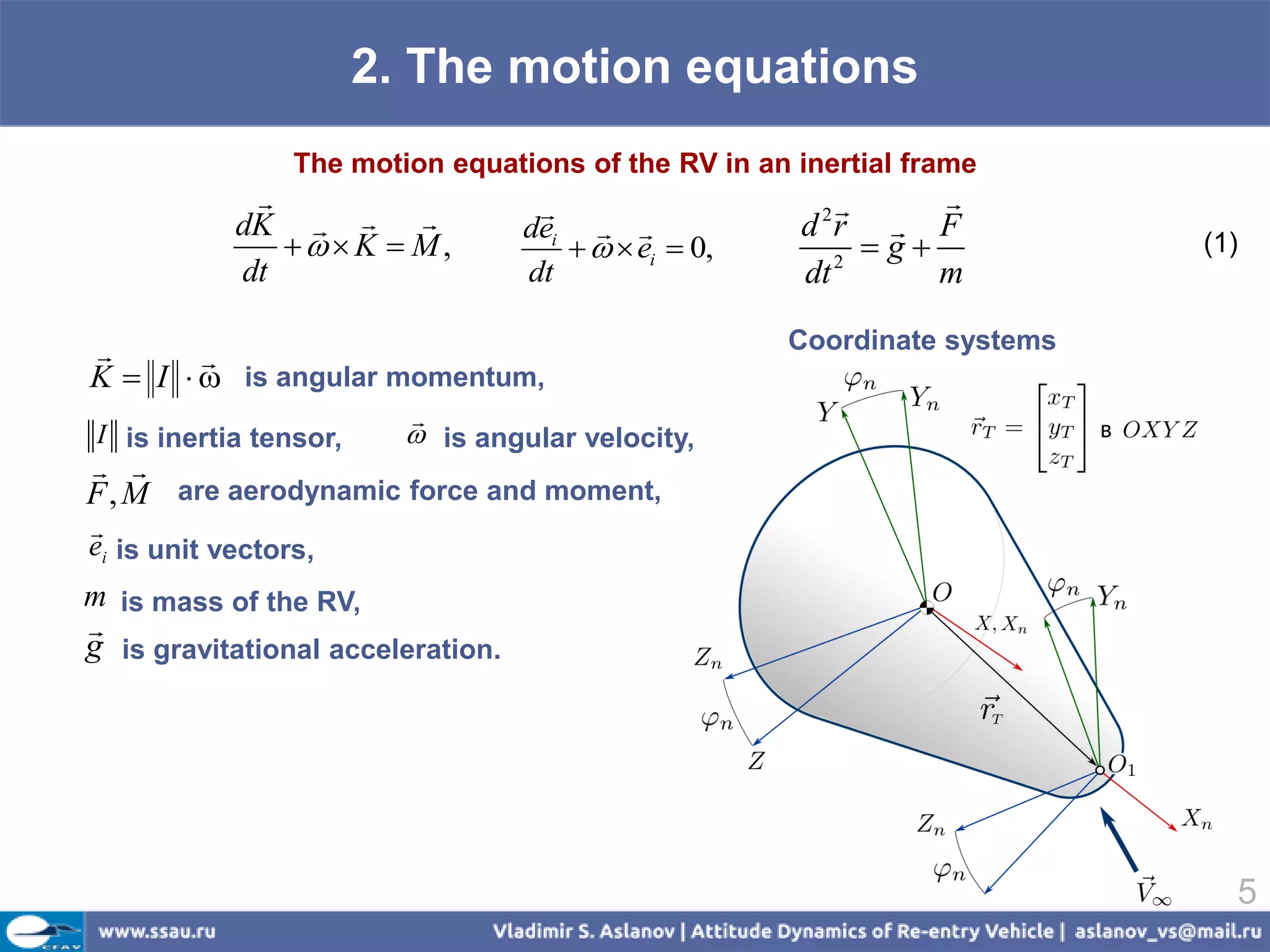
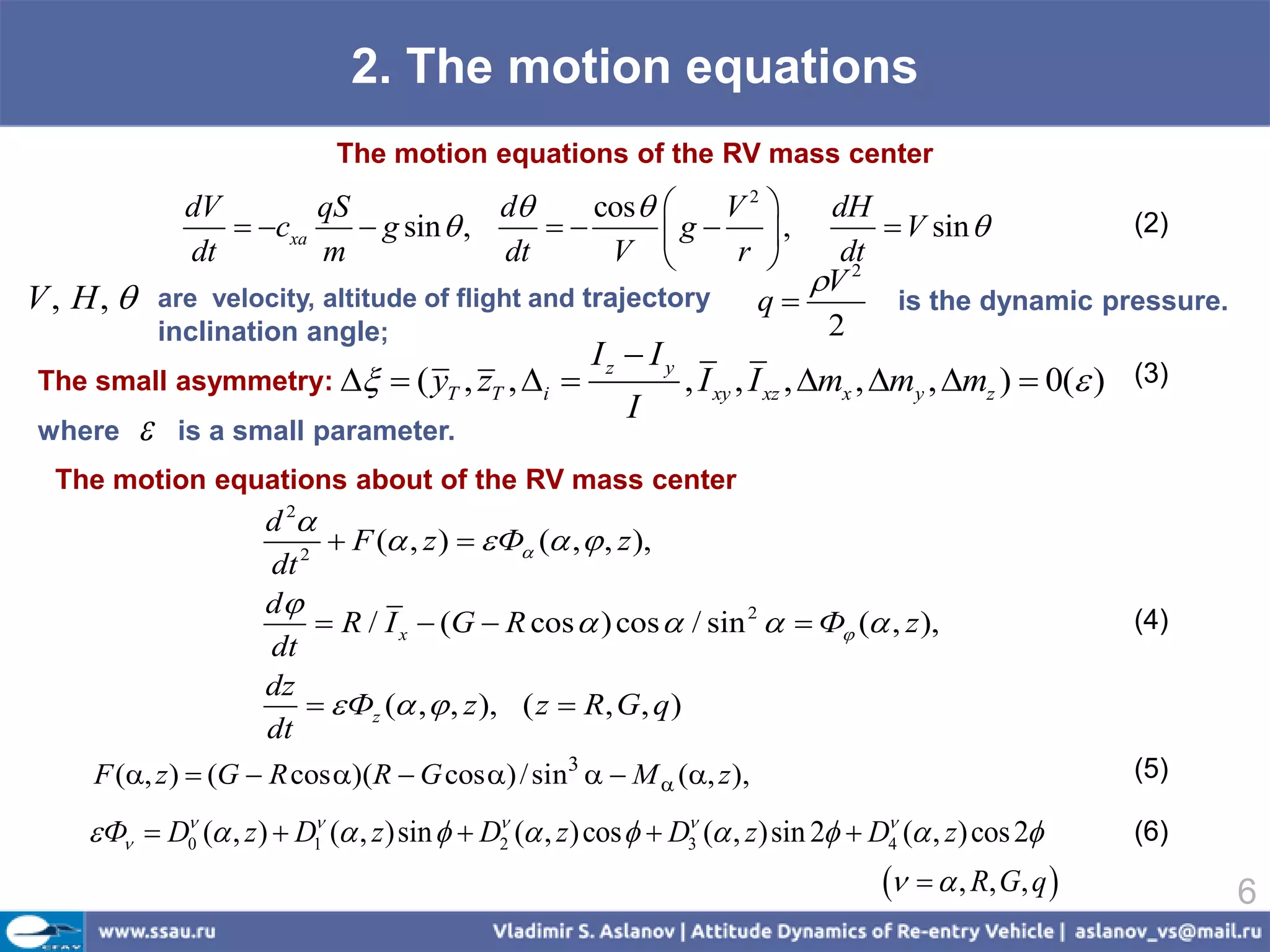
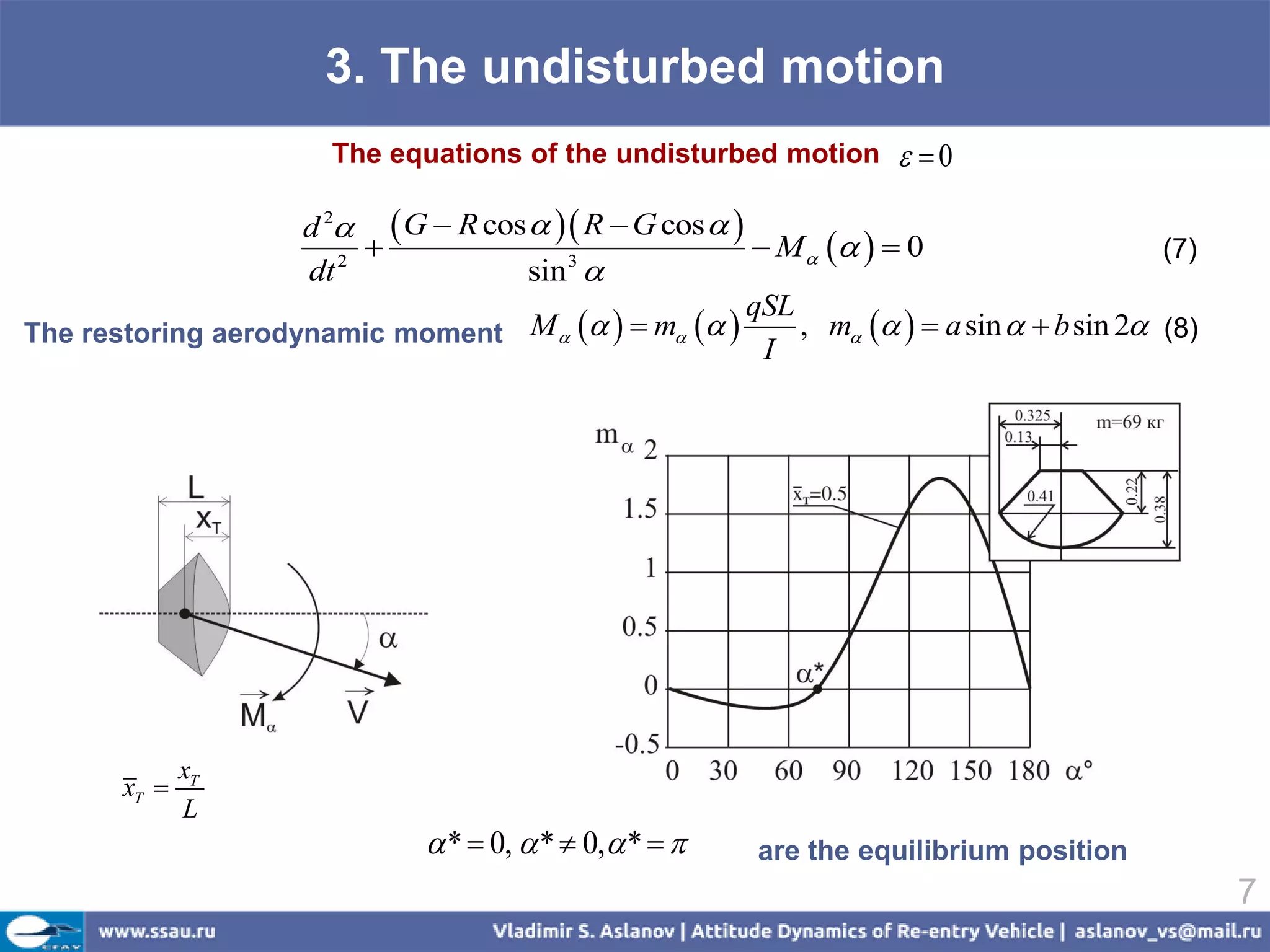
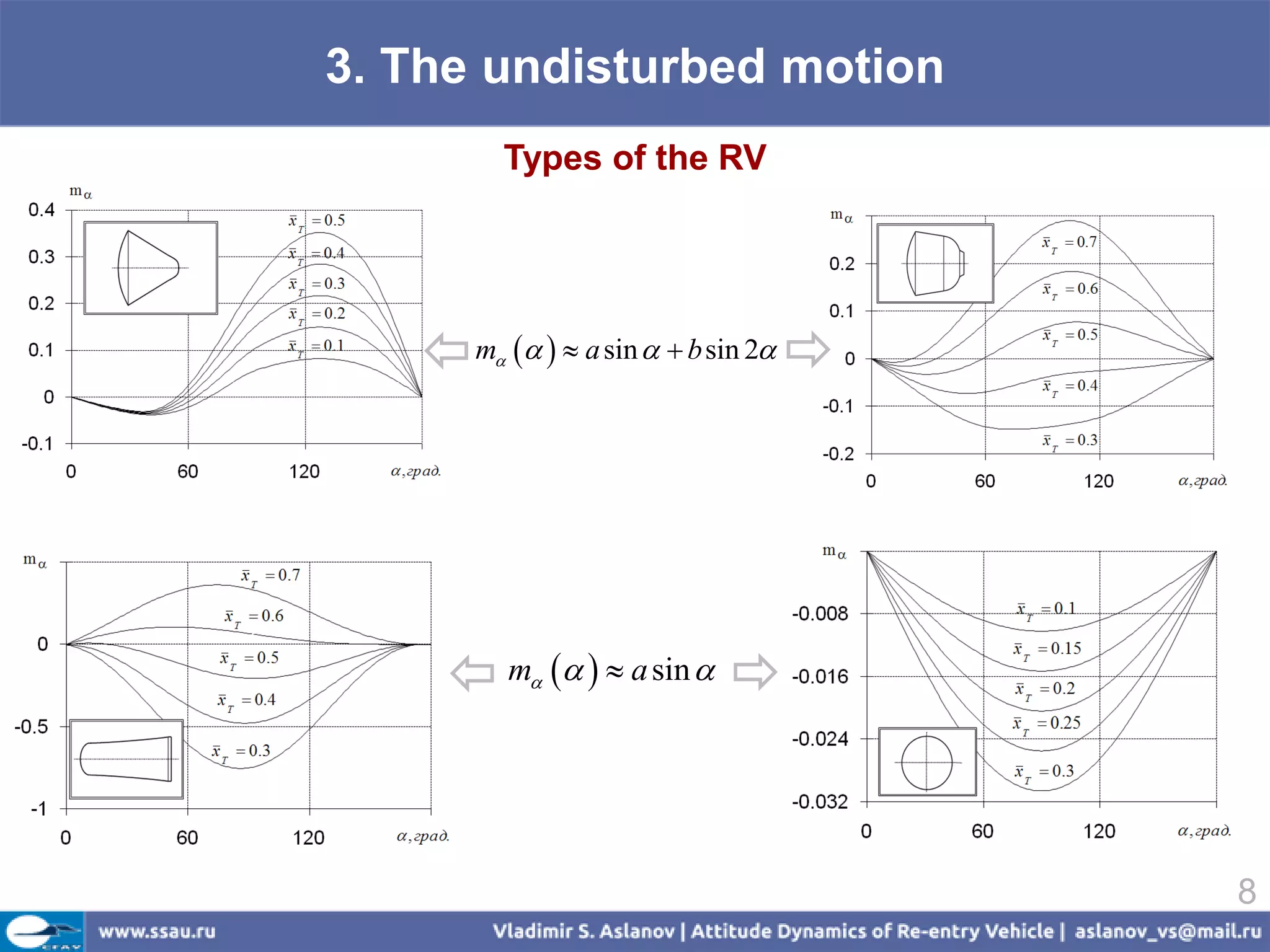
The document discusses the attitude dynamics of a re-entry vehicle (RV) in planetary atmospheres. It presents the following: 1) Equations of motion for the RV's angular momentum, unit vectors describing its orientation, and acceleration due to aerodynamic and gravitational forces. 2) Equations of motion for the RV's mass center in terms of its velocity, altitude, trajectory inclination angle, and dynamic pressure. 3) Solutions to the undisturbed equations of motion, including an energy integral and general solutions involving elliptic functions for different forms of the restoring aerodynamic moment.

























![Perancangan pesawat angkat & angkut [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/perancanganpesawatangkatangkutautosaved-150823062211-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)












![1032 pearson[2]](https://cdn.slidesharecdn.com/ss_thumbnails/myacm86as7elq7uytmbp-signature-3e49a9720aafd161ec5213fc5cb0fac76e0a38578f2089fb876ad1cc6de4bad4-poli-140825181335-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)