![Уравнения движения
Решения уравнений движения твёрдого тела
Динамические уравнения движения тела вокруг центра масс:
Jx ωx − (Jy − Jz )ωy ωz = Mx ,
˙
Jy ωy − (Jz − Jx )ωz ωx = My ,
˙
Jz ωz − (Jx − Jy )ωx ωy = Mz .
˙
(1)
Для уравнений (1) найдены аналитические решения только для
нескольких частных случаев [1]:
Случай Эйлера;
Случай Лагранжа;
Случай Ковалевской;
Случай Горячева-Чаплыгина;
Случай Гесса.
Кафедра ТМ (СГАУ)
Случай Эйлера
24 ноября 2013 г.
1 / 51](https://image.slidesharecdn.com/eulercase-131013083203-phpapp02/85/slide-2-320.jpg)



![Полодии
Полодии [2]
Линии пересечения эллипсоида
энергии и эллипсоида инерции
определяют полодии –
геометрическое место вектора
угловой скорости.
Кафедра ТМ (СГАУ)
Случай Эйлера
24 ноября 2013 г.
5 / 51](https://image.slidesharecdn.com/eulercase-131013083203-phpapp02/85/slide-6-320.jpg)






![Геометрическая интерпретация Пуансо
Геометрическая интерпретация
Движение твёрдого тела вокруг неподвижной точки можно
представить как качение эллипсоида энергии тела по неизменяемой
плоскости, при этом геометрический центр эллипсоида энергии
закреплен на расстоянии 2T /L выше этой плоскости [2].
Кафедра ТМ (СГАУ)
Случай Эйлера
24 ноября 2013 г.
12 / 51](https://image.slidesharecdn.com/eulercase-131013083203-phpapp02/85/slide-13-320.jpg)

































![Регулярная прецессия
Определение углов Эйлера [3]
Сравнивая выражения для проекций вектора кинетического момента L
на оси главного центрального базиса:
Lx = L sin ϑ0 sin ϕ,
Lx = Jx ωx ,
Ly = L sin ϑ0 cos ϕ, и
Ly = Jx ωy ,
(79)
Lz = L cos ϑ0 .
Lz = Jz ωz .
L cos ϑ0 = Jz ωz
→
cos ϑ0 = cos θ0 =
Jz ωz0
L
(80)
Угол нутации при движении осесимметричного твёрдого тела по
инерции остаётся постоянным.
Кафедра ТМ (СГАУ)
Случай Эйлера
24 ноября 2013 г.
47 / 51](https://image.slidesharecdn.com/eulercase-131013083203-phpapp02/85/slide-48-320.jpg)





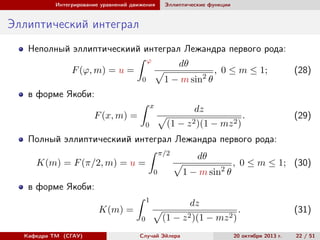
Документ посвящен движению твердого тела с неподвижной точкой по инерции, рассматривая динамические уравнения и их аналитические решения в частных случаях, включая случай Эйлера. Включены обсуждения первых интегралов движения, полодий и устойчивости вращений вокруг главных осей инерции. Освещаются математические интерпретации и уравнения, связанные с эллиптическими функциями и свойствами инерции твердого тела.