![Rigid body debris
[1] V.S. Aslanov, V. V. Yudintsev, Dynamics of Large Debris Connected to Space Tug by a Tether, J.
Guid. Control. Dyn. 36, 2013. P. 1654–1660.
[2] V. Aslanov, V. Yudintsev, Dynamics of large space debris removal using tethered space tug, Acta
Astronaut. Volume 91, 2013, P. 149-156.
Debris with flexible appendages
[3] V. S. Aslanov, V. V. Yudintsev, Behaviour of Tethered Debris With Flexible Appendages Acta
Astronaut. 104, Issue 1, 2014. P. 91-98.
[4] V. S. Aslanov and V. V. Yudintsev Dynamics, Analytical Solutions and Choice of Parameters for
Towed Space Debris with Flexible Appendages. Adv. Sp. Res. Volume 55, Issue 2, 2015. P. 660-667.
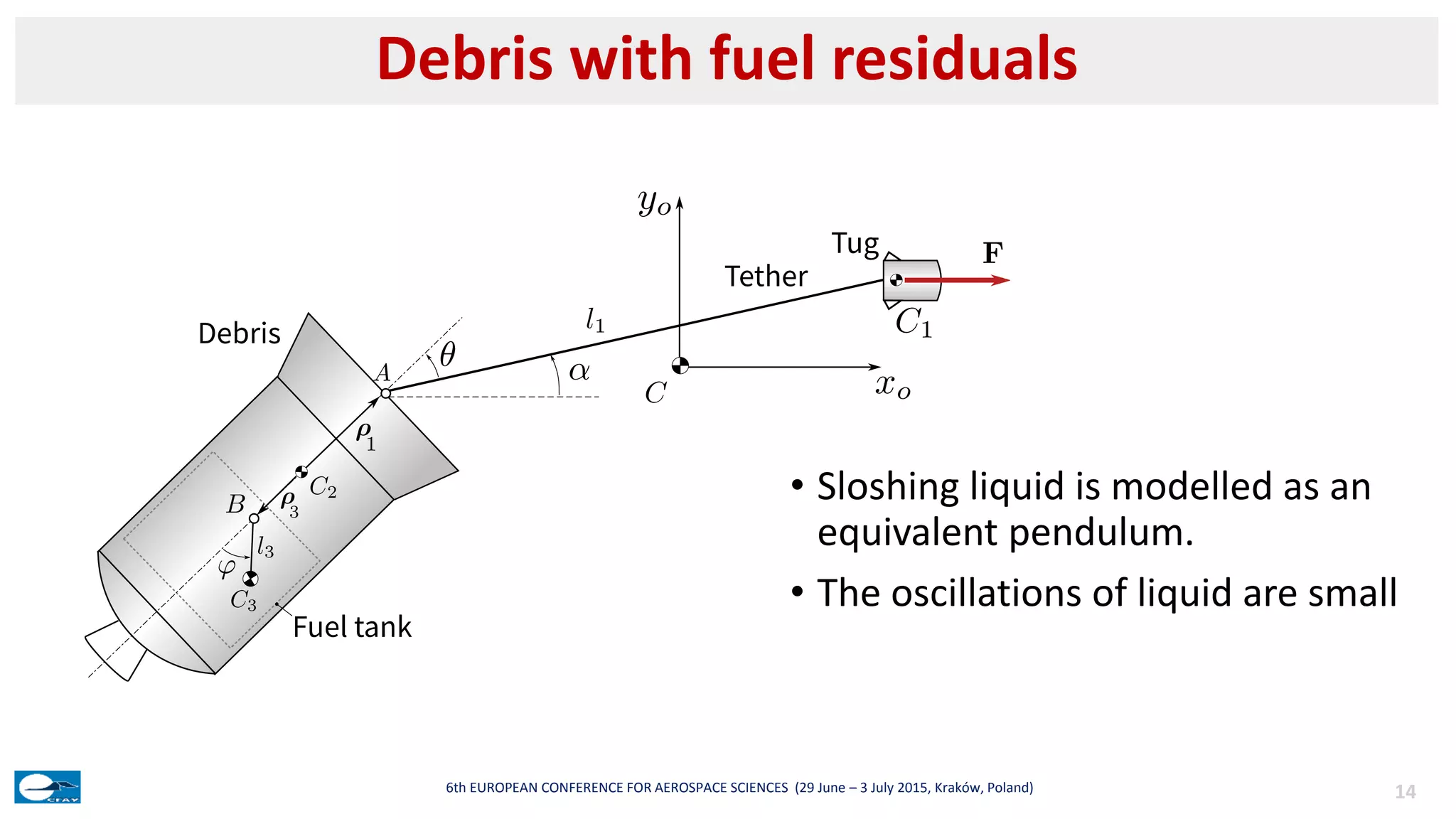
Debris with fuel residuals
[5] V. S. Aslanov and V. V. Yudintsev The motion of tethered tug-debris system with fuel residuals.
Adv. Sp. Res. (Accepted for publication).
Re-entry
[6] V. Aslanov, A. Ledkov, Dynamics of towed large space debris taking into account atmospheric
disturbance, Acta Mech. Volume 225, Issue 9, 2014. P. 1-13.
Publications
186th EUROPEAN CONFERENCE FOR AEROSPACE SCIENCES (29 June – 3 July 2015, Kraków, Poland)](https://image.slidesharecdn.com/aslanovyudintseveucass-2015v1-150630082042-lva1-app6891/75/On-problems-of-active-space-debris-removal-using-tethered-towing-18-2048.jpg)


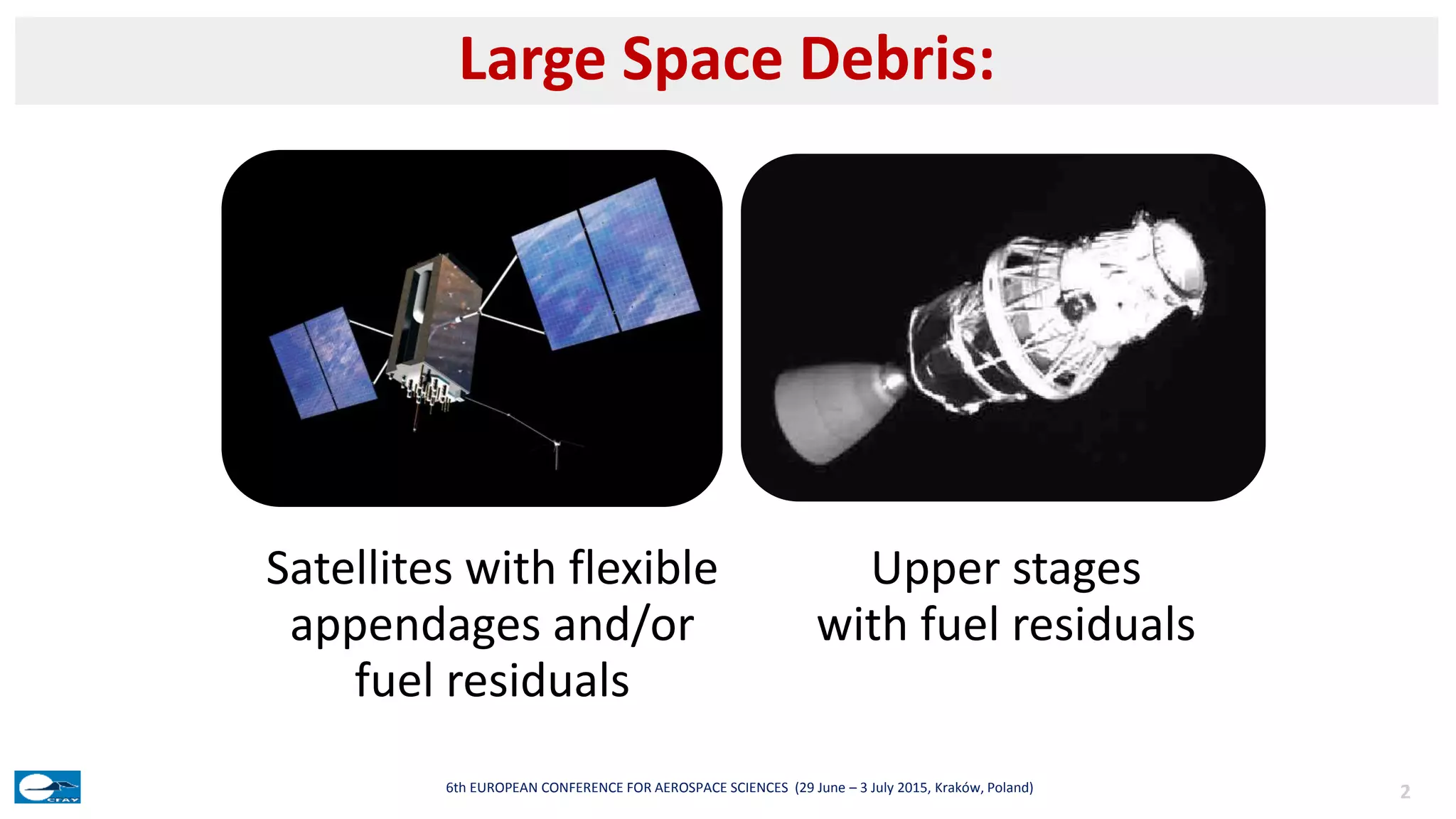
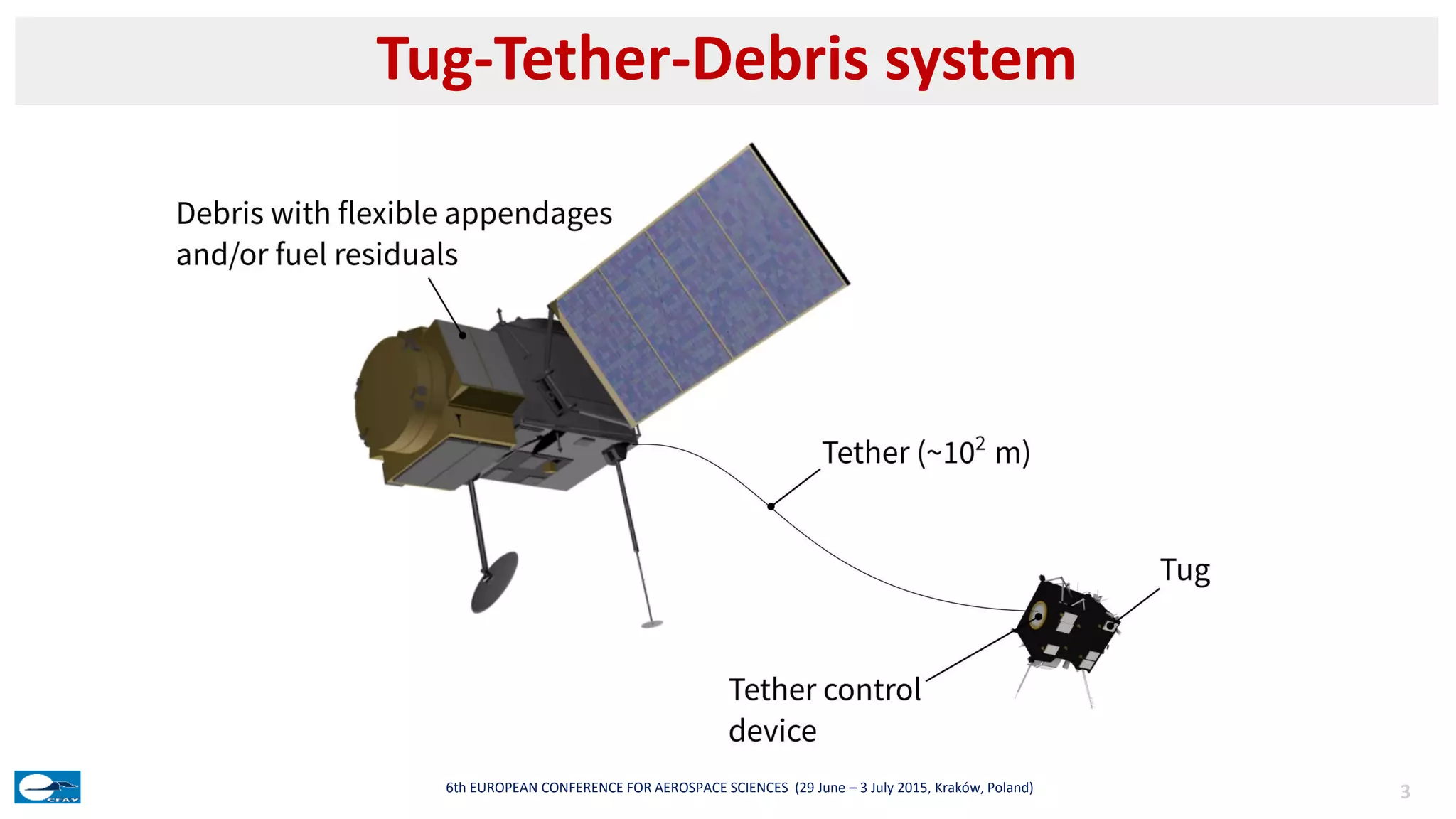
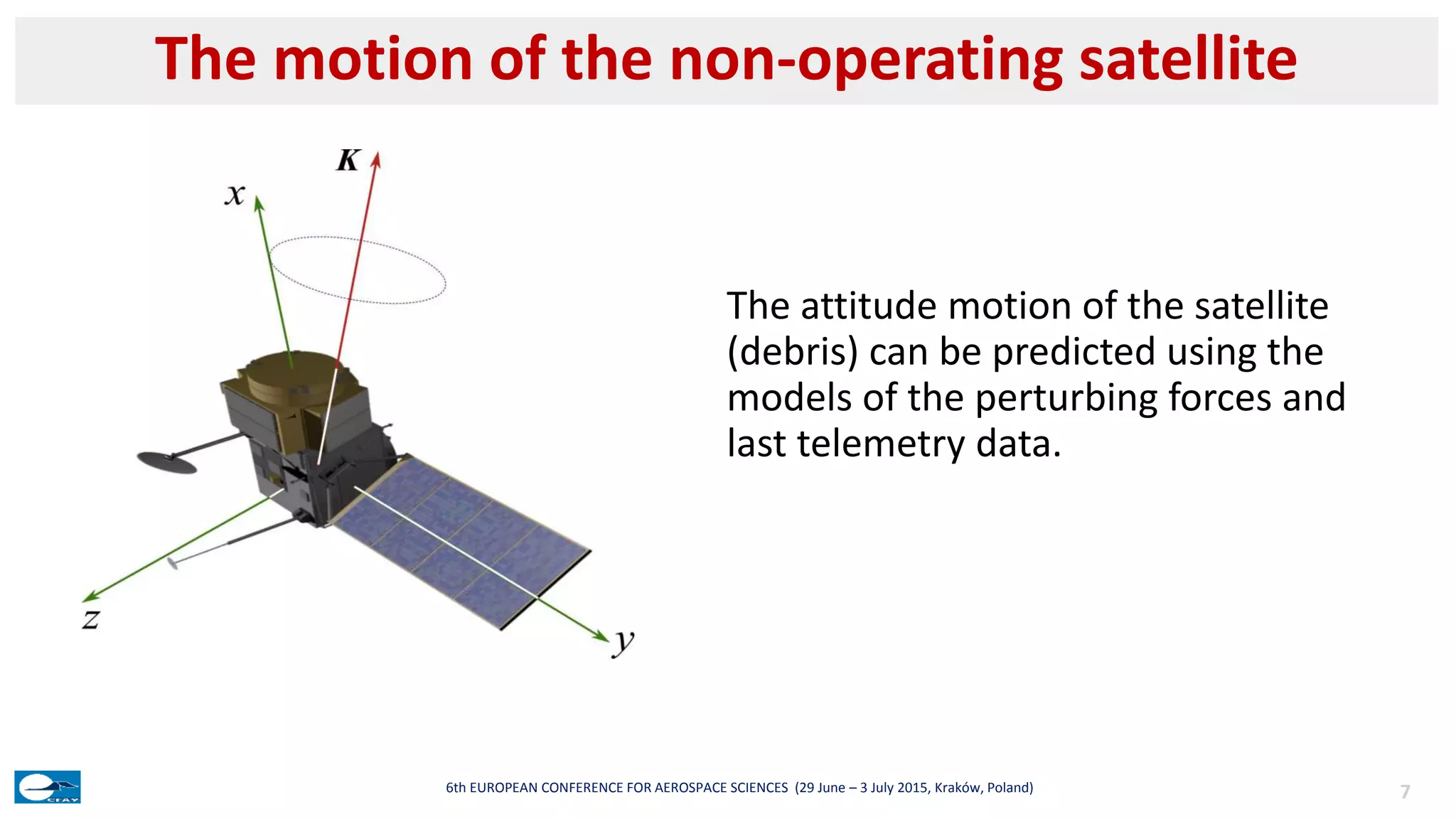
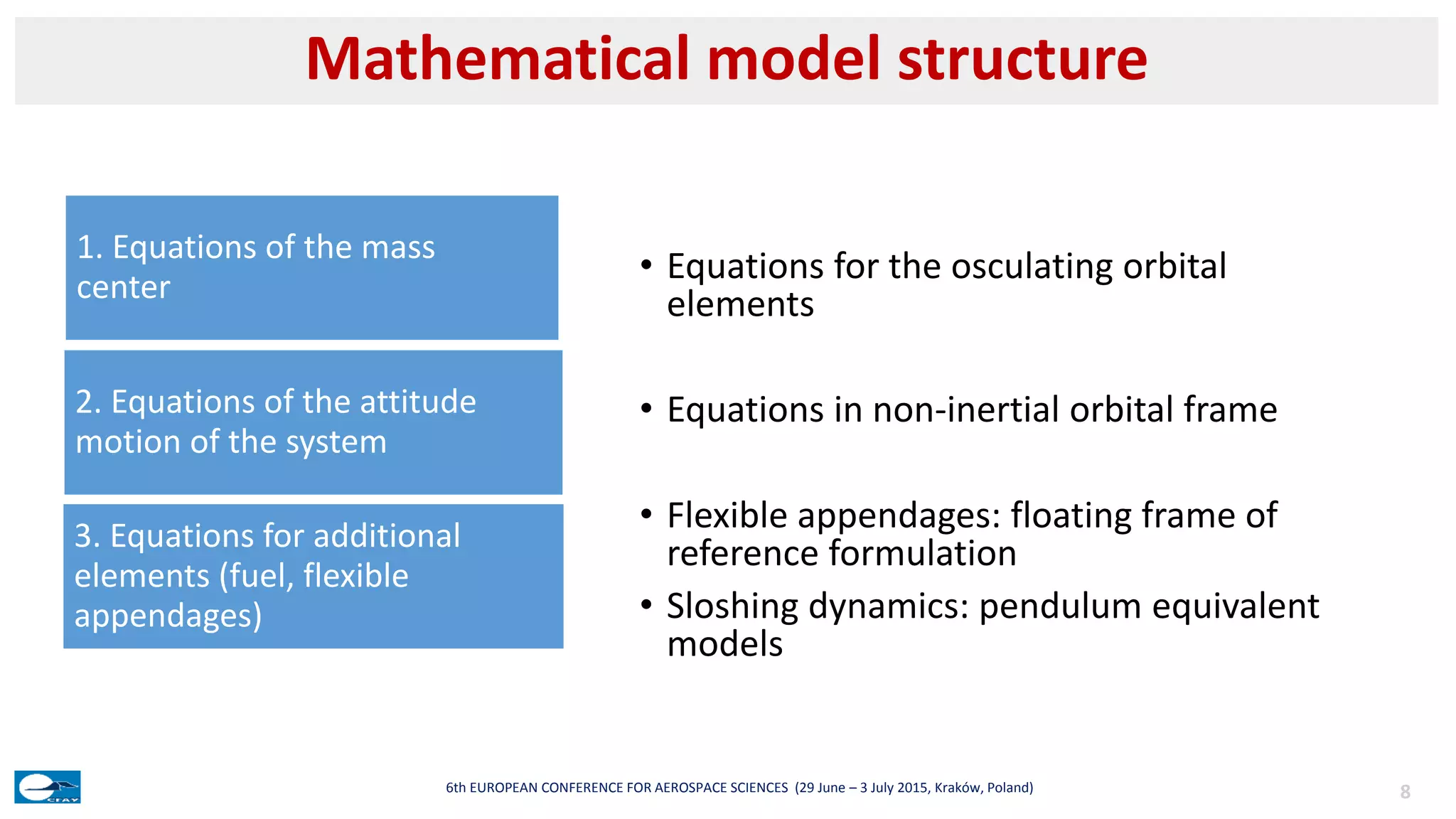
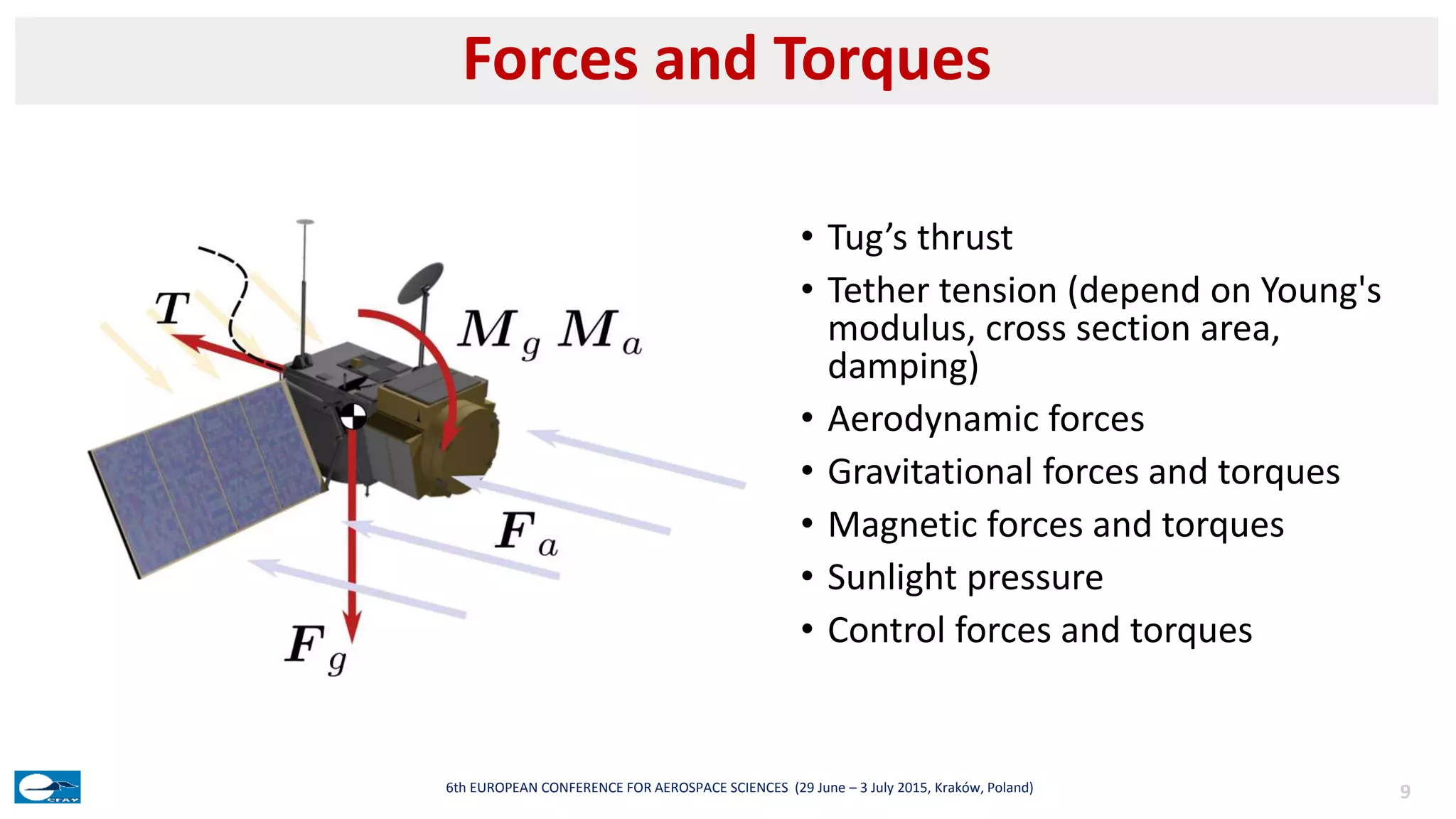
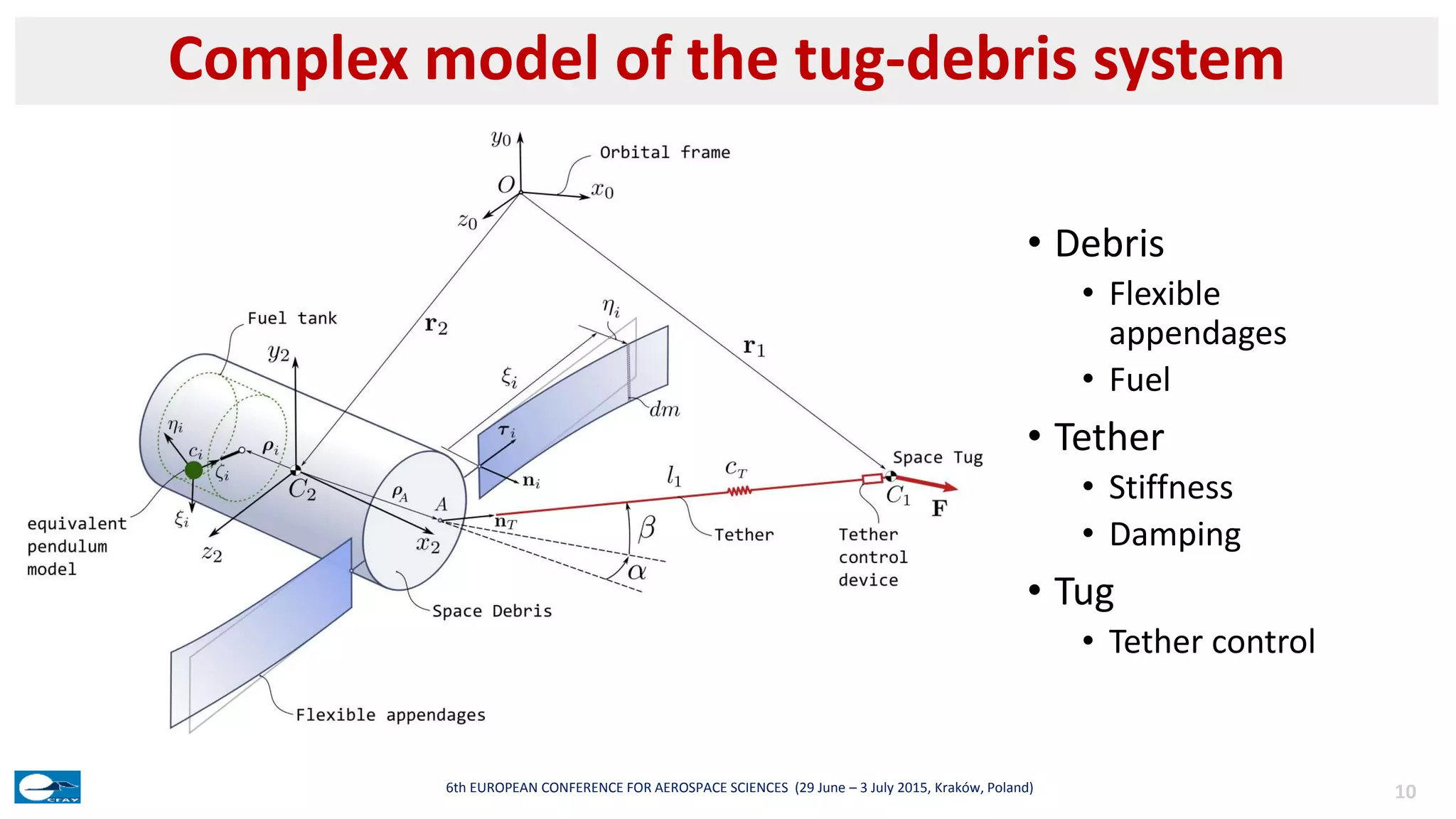
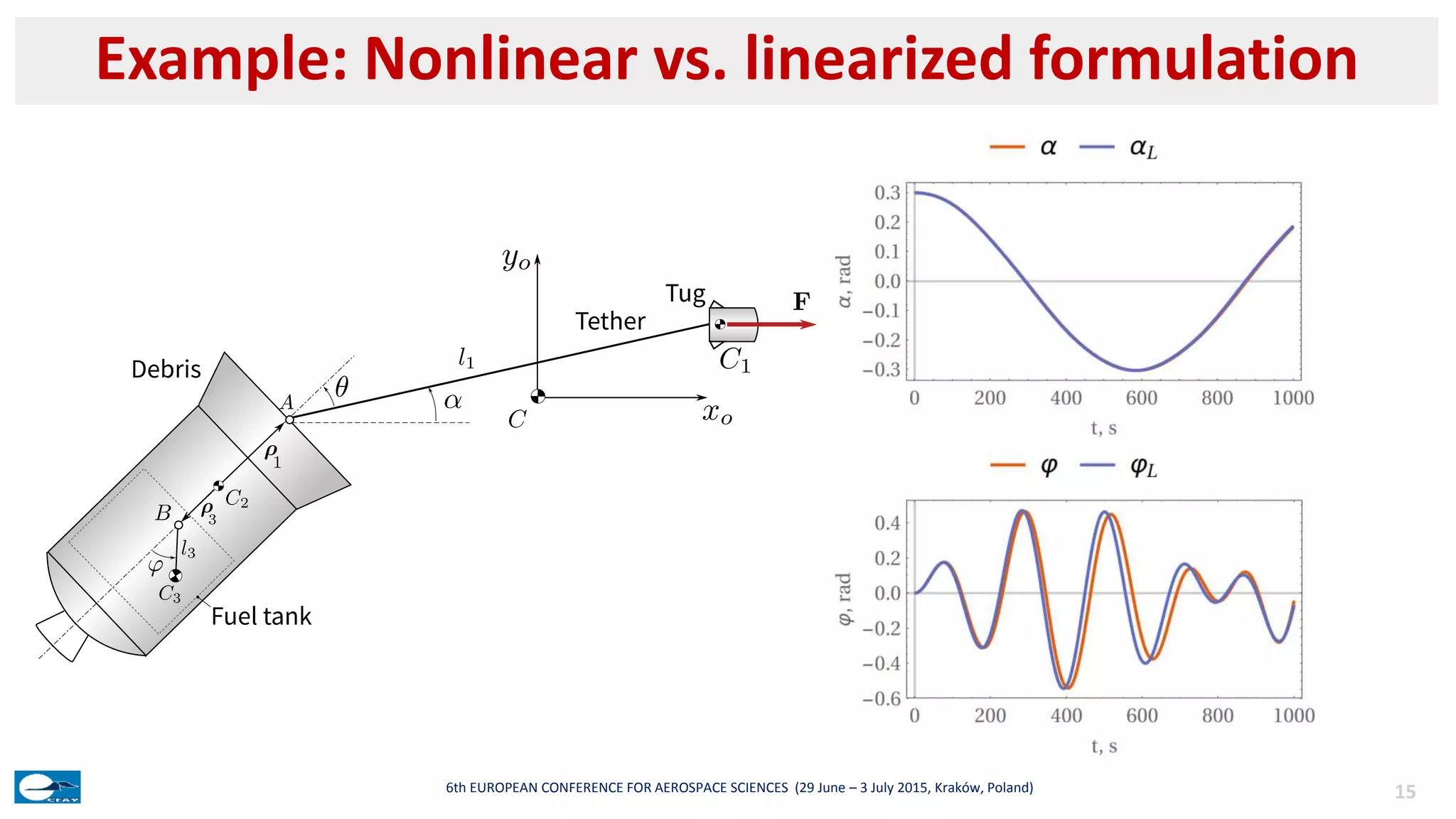
The document discusses active debris removal in space using tethered towing. The authors have developed a mathematical model of the attitude motion of a debris-tether-tug system. The model accounts for factors such as flexible appendages on the debris, fuel residuals, tether properties, and environmental forces. The authors aim to further study the capture dynamics of debris and stabilization after capture, and create a comprehensive model covering all stages from initial capture to atmospheric reentry.