Динамика твёрдого тела: случай Лагранжа
•
0 likes•9,213 views

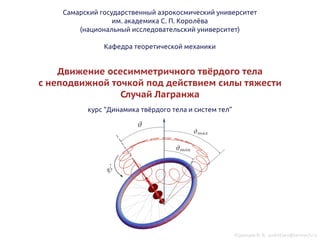
Рассматривается движение осесимметричного твёрдого тела вокруг неподвижной точки под действием силы тяжести.
![Случай Лагранжа
Свойства тела и внешние условия [1]
Осесимметричное тело вращается
вокруг неподвижной точки O,
расположенной на оси симметрии
тела z2 :
С
поперечные моменты инерции
равны Jx = Jy = Jz ;
O
Кафедра ТМ (СГАУ)
центр масс C находится на оси
симметрии и смещен от точки
опоры O на расстояние
OC = s.
Случай Лагранжа
10 ноября 2013 г.
2 / 29](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Динамика твёрдого тела: случай Лагранжа
Similar to Динамика твёрдого тела: случай Лагранжа (10)
More from Theoretical mechanics department
More from Theoretical mechanics department (20)
Динамика твёрдого тела: случай Лагранжа
- 1. Самарский государственный аэрокосмический университет им. академика С. П. Королёва (национальный исследовательский университет) Кафедра теоретической механики Движение осесимметричного твёрдого тела с неподвижной точкой под действием силы тяжести Случай Лагранжа курс “Динамика твёрдого тела и систем тел” Юдинцев В. В. yudintsev@termech.ru
- 2. Случай Лагранжа Свойства тела и внешние условия [1] Осесимметричное тело вращается вокруг неподвижной точки O, расположенной на оси симметрии тела z2 : С поперечные моменты инерции равны Jx = Jy = Jz ; O Кафедра ТМ (СГАУ) центр масс C находится на оси симметрии и смещен от точки опоры O на расстояние OC = s. Случай Лагранжа 10 ноября 2013 г. 2 / 29
- 3. Системы координат Неподвижный, полуподвижный и связанный базисы Неподвижный базис e(1) : Ox1 y1 z1 Полуподвижный базис e(2) : Ox2 y2 z2 , повернутый относительно Ox1 y1 z1 на углы ψ, ϑ С O Кафедра ТМ (СГАУ) Связанный с телом базис e(3) : Ox3 y3 z3 , повернутый относительно Ox1 y1 z1 на углы ψ, ϑ, ϕ Случай Лагранжа 10 ноября 2013 г. 3 / 29
- 4. Уравнения движения Теорема об изменении момента количества движения Абсолютная производная момента количества движения относительно неподвижного полюса O равна главному моменту внешних сил относительно полюса O [1]: С ˙ LO = MO (1) O Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 4 / 29
- 5. Уравнения движения Производная вектора кинетического момента Абсолютная производная вектора кинетического момента относительно точки опоры: ˜ d(2) LO ˙ LO = + Ω × LO dt С (2) где: O Кафедра ТМ (СГАУ) Ω – абсолютная угловая скорость базиса e(2) ; ˜ d(2) LO /dt – локальная производная LO в базисе e(2) . Случай Лагранжа 10 ноября 2013 г. 5 / 29
- 6. Уравнения движения Координаты векторов L0 , MO и Ω в базисе e(2) LO =Jx ω x + Jx ω y + Jz ω z = ˙ (2) + Jx ϑ e1 (2) ˙ + Jx ψ sin ϑ e2 С (2) ˙ + Jz (ϕ + ψ cos ϑ) e3 ˙ ˙ (2) Ω = + ϑ e1 (2) ˙ + ψ sin ϑ e2 (2) ˙ + ψ cos ϑ e3 O Кафедра ТМ (СГАУ) (2) MO = mgs sin ϑ e1 Случай Лагранжа 10 ноября 2013 г. 6 / 29
- 7. Уравнения движения Уравнения движения Векторная форма: ˜ d(2) LO ˙ LO = + Ω × LO = MO dt (3) Скалярная форма: ¨ ˙ ˙ ˙ ˙ Jx ϑ + [Jz (ϕ + ψ cos ϑ) − Jx ψ cos ϑ]ψ sin ϑ − mgs sin ϑ = 0 ¨ ˙˙ ˙ ˙ ˙ J ψ sin ϑ + 2Jx ψ ϑ cos ϑ − Jz ϑ(ϕ + ψ cos ϑ) =0 x ¨ ˙ ϑ sin ϑ ˙ ϕ + ψ cos ϑ − ψ ¨ =0 Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. (4) 7 / 29
- 8. Первые интегралы Lz2 = const ¨ ˙ ˙ ˙ Jx ϑ + [Jz (ϕ + ψ cos ϑ) − Jx ψ cos ϑ]ψ sin ϑ − mgs sin ϑ = 0 ˙ ¨ sin ϑ + 2Jx ψ ϑ cos ϑ − Jz ϑ(ϕ + ψ cos ϑ) ˙˙ ˙ ˙ ˙ Jx ψ =0 ¨ cos ϑ − ψ ϑ sin ϑ ˙˙ ϕ+ψ ¨ =0 d (ϕ+ψ cos ϑ)=ωz ˙ ˙ ˙ dt Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 8 / 29
- 9. Первые интегралы Lz2 = const ˙ ϕ + ψ cos ϑ = ωz = const ˙ (5) Проекция вектора кинетического момента на направление оси симметрии тела постоянна: С Lz2 = const (6) Иитеграл (5) следует также из уравнения: O Jz ωz − (Jx − Jx )ωy ωx = Mz2 = 0 ˙ Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 9 / 29
- 10. Первые интегралы Уравнения движения ˙ После подстановки ϕ + ψ cos ϑ = ωz в уравнения: ˙ ¨ ˙ ˙ ˙ Jx ϑ + [Jz (ϕ + ψ cos ϑ) − Jx ψ cos ϑ]ψ sin ϑ − mgs sin ϑ = 0, ˙ ¨ ˙˙ ˙ ˙ ˙ Jx ψ sin ϑ + 2Jx ψ ϑ cos ϑ − Jz ϑ(ϕ + ψ cos ϑ) = 0, получим уравнения движения: ¨ ˙ ˙ Jx ϑ + (Jz ωz − Jx ψ cos ϑ)ψ sin ϑ − mgs sin ϑ = 0, ¨ ˙˙ ˙ Jx ψ sin ϑ + 2Jx ψ ϑ cos ϑ − Jz ωz ϑ = 0. Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 10 / 29
- 11. Первые интегралы Lz1 = const После умножения второго уравнения системы ¨ ˙ ˙ Jx ϑ + (Jz ωz − Jx ψ cos ϑ)ψ sin ϑ − mgs sin ϑ = 0 ¨ ˙˙ ˙ Jx ψ sin ϑ + 2Jx ψ ϑ cos ϑ − Jz ωz ϑ = 0 (7) · sin ϑ (8) на sin ϑ, получим: d ˙ Jx ψ sin2 ϑ + Jz ωz cos ϑ = 0 dt Проекция вектора кинетического момента на направление вертикали z1 постоянна: ˙ Jx ψ sin2 ϑ + Jz ωz cos ϑ = L = const , т. к. линии действия сил, действующих на тело, или параллельны оси z1 или пересекают эту ось. Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 11 / 29
- 12. Первые интегралы Интеграл энергии Уравнения движения ¨ ˙ ˙ Jx ϑ + (Jz ωz − Jx ψ cos ϑ)ψ sin ϑ − mgs sin ϑ = 0 ¨ ˙˙ ˙ Jx ψ sin ϑ + 2Jx ψ ϑ cos ϑ − Jz ωz ϑ = 0 ˙ ·ϑ ˙ · ψ sin ϑ (9) (10) ˙ Умножим уравнение (9) на ϑ и сложим результат с уравнением (10), ˙ sin ϑ: умноженным на ψ ˙ ˙ d Jx (ψ 2 sin2 ϑ + ϑ2 ) + mgs cos ϑ = 0 dt 2 Интеграл энергии 2 ˙ ˙ Jx (ψ 2 sin2 ϑ + ϑ2 ) Jz ωz + mgs cos ϑ = const = E − 2 2 или 2 2 2 Jx (ωx + ωy ) + Jz ωz + 2mgs cos ϑ = 2E. Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 12 / 29
- 13. Решения уравнений Частные случаи Плоское движение маятника Если проекция угловой скорости на ось z2 равна нулю ωz = 0, то: изменяется только координата ϑ ϕ = 0, ˙ ˙ ψ = 0; уравнения движения принимают вид: ¨ Jx ϑ − 2mgs sin ϑ = 0 интеграл энергии: ˙ Jx ϑ2 + 2mgs cos ϑ = 2E = const Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 13 / 29
- 14. Решения уравнений Частные случаи Регулярная прецессия Регулярная прецессия – движение с постоянной величиной угла нутации ϑ = const. Из уравнений движения и интеграла С ˙ ϕ + ψ cos ϑ = ωz = const ˙ следует, что ˙ ψ = const, ϕ = const. ˙ O Кафедра ТМ (СГАУ) Ось симметрии тела описывает конус с вертикальной осью z1 Случай Лагранжа 10 ноября 2013 г. 14 / 29
- 15. Решения уравнений Частные случаи Регулярная прецессия ¨ При ϑ = 0 уравнение ¨ ˙ ˙ Jx ϑ + (Jz ωz − Jx ψ cos ϑ)ψ sin ϑ − mgs sin ϑ = 0 ˙ принимает вид квадратного уравнения относительно ψ (sin ϑ = 0): ˙ ˙ ψ 2 Jx cos ϑ − ψJz ωz + mgs = 0, с решениями Jz ωz ˙ 1,2 = 2Jx cos ϑ0 ψ mgs , J z ωz Кафедра ТМ (СГАУ) 1± 1− 4Jx mgs cos ϑ0 2 2 Jz ωz , если cos ϑ0 = 0 если cos ϑ0 = 0 Случай Лагранжа 10 ноября 2013 г. 15 / 29
- 16. Решения уравнений Частные случаи Регулярная прецессия: cos ϑ0 = 0 cos ϑ0 = 0 mgs ˙ ψ= Jz ωz Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 16 / 29
- 17. Решения уравнений Частные случаи Регулярная прецессия: cos ϑ0 < 0 cos ϑ0 < 0 ˙ ψ1,2 = J z ωz 2Jx cos ϑ0 1± 1− 4Jx mgs cos ϑ0 2 2 Jz ωz ˙ ˙ Корни ψ1 , ψ2 положительные для любых значений ϑ = ϑ0 Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 17 / 29
- 18. Решения уравнений Частные случаи Регулярная прецессия: cos ϑ0 > 0 cos ϑ0 > 0 ˙ ψ1,2 = J z ωz 2Jx cos ϑ0 1± 1− 4Jx mgs cos ϑ0 2 2 Jz ωz Регулярная прецессия возможно только для достаточно больших значений ωz , при которых подкоренное выражение положительно: 1− Кафедра ТМ (СГАУ) 4Jx mgs cos ϑ0 >0 2 2 Jz ωz Случай Лагранжа 10 ноября 2013 г. 18 / 29
- 19. Решения уравнений Общее решение Общее решение 1 Из второго интеграла: ˙ Jx ψ sin2 ϑ + Jz ωz cos ϑ = L ˙ выразим ψ L − Jz ωz cos ϑ ˙ ψ= . Jx sin2 ϑ 2 ˙ Подставив ψ в интеграл энергии, получим дифференциальное уравнение для ϑ: (L − Jz ωz cos ϑ)2 2 ˙ Jx ϑ2 = 2E − Jz ωz − 2mgs cos ϑ − Jx sin2 ϑ Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. (11) 19 / 29
- 20. Решения уравнений Общее решение Общее решение 3 Замена переменных: ˙ u = cos ϑ, u = −ϑ sin ϑ. ˙ 4 (12) Уравнение движения для ϑ: (L − Jz ωz cos ϑ)2 2 ˙ . Jx ϑ2 = 2E − Jz ωz − 2mgs cos ϑ − Jx sin2 ϑ 5 Уравнение движения для u: u2 = ˙ 2 (2E − Jz ωz − 2mgsu)(1 − u2 ) (L − Jy ωz u)2 − 2 Jx Jx (13) полином 3 степени от u Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 20 / 29
- 21. Решения уравнений Общее решение Корни полинома правой части уравнения (13) u2 = ˙ 2 (2E − Jz ωz − 2mgsu)(1 − u2 ) (L − Jz ωz u)2 − 2 Jx Jx при u = ±1 правая часть принимает отрицательные значения, при u → ∞, правая часть бесконечно возрастает. Существует 1 вещественный корень u3 > 1 На интервале [−1; 1] существует или два вещественных корня или или один двойной вещественный u2 , u3 . Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 21 / 29
- 22. Решения уравнений Общее решение Общее решение 6 Располагая корни полинома u1 ≤ u2 < u3 приведем уравнение u2 = ˙ 2 (2E − Jz ωz − 2mgsu)(1 − u2 ) (L − Jy ωz u)2 − 2 Jx Jx к виду u2 = ˙ Кафедра ТМ (СГАУ) 2mgs (u − u1 )(u − u2 )(u − u3 ) Jx Случай Лагранжа 10 ноября 2013 г. (14) 22 / 29
- 23. Решения уравнений Общее решение Общее решение u2 = ˙ 7 2mgs (u − u1 )(u − u2 )(u − u3 ) Jx Выполняя замену переменных u = u1 + (u2 − u1 )v 2 , (15) получим уравнение v2 = ˙ mgs (u3 − u1 )(1 − v 2 )(1 − k 2 v 2 ) 2Jx где 0 ≤ k2 = Кафедра ТМ (СГАУ) (16) u2 − u1 ≤1 u3 − u1 Случай Лагранжа 10 ноября 2013 г. 23 / 29
- 24. Решения уравнений Общее решение Общее решение Получено дифференциальное уравнение с разделяющимися переменными: v2 = ˙ mgs (u3 − u1 )(1 − v 2 )(1 − k 2 v 2 ) 2Jx (17) Решение уравнения записывается при помощи эллиптического интеграла 1-го рода v = v0 dv (1 − v 2 )(1 − k 2 v 2 ) = (t − t0 ) (u3 − u1 )mgs =τ ⇒ 2Jx (18) v = sn τ Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 24 / 29
- 25. Решения уравнений Общее решение Решение для угла ϑ Решение для угла ϑ имеет вид: cos ϑ = cos ϑ1 + (cos ϑ2 − cos ϑ1 )sn2 τ (19) Постоянные ϑ1 , ϑ2 определяют минимальное и максимальное значение ϑ и вычисляются следующим образом: (20) cos ϑ1 = u1 , cos ϑ2 = u2 Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 25 / 29
- 26. Решения уравнений Общее решение Решения для углов ψ и ϕ L − Jz ωz cos ϑ ˙ ψ= Jx (1 − cos2 ϑ) ˙ ϕ = ωz − ψ cos ϑ ˙ Кафедра ТМ (СГАУ) (21) (22) Случай Лагранжа 10 ноября 2013 г. 26 / 29
- 27. Решения уравнений Общее решение Пример 1 30 28 , o 26 24 22 20 0 1 2 3 4 5 t, c 100 Ψ, o c 50 0 50 Jx = Jy = 1, Jz = 3, m = 1, g = 10, ˙ s = 0.5, ωz = 3, ϑ0 = π/6, ψ = 2. 100 0 1 2 3 4 5 t, c Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 27 / 29
- 28. Решения уравнений Общее решение Пример 2 30.0 , o 29.5 29.0 28.5 0 1 2 3 4 3 4 5 t, c 45 Ψ, o c 40 Jx = Jy = 1, Jz = 3, m = 1, g = 10, ˙ s = 0.5, ωz = 3, ϑ0 = π/6, ψ = 0.8. 35 30 25 0 1 2 5 t, c Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 28 / 29
- 29. Решения уравнений Общее решение Список использованных источников Й. Виттенбург. Динамика систем твердых тел. Мир, M., 1980. Кафедра ТМ (СГАУ) Случай Лагранжа 10 ноября 2013 г. 29 / 29