Downloaded 102 times




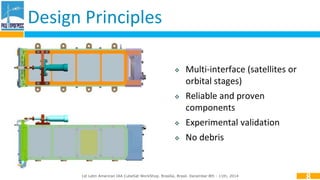
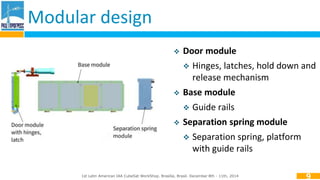
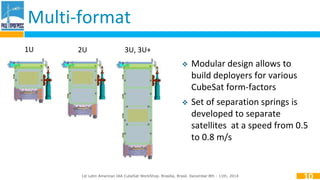
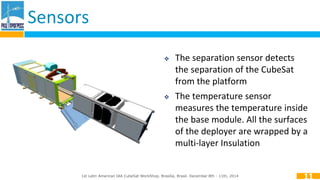
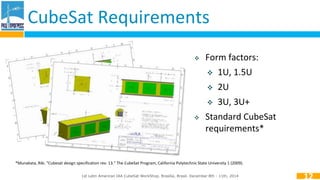
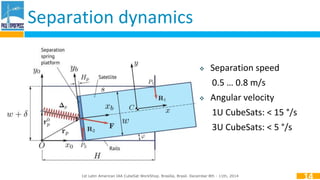
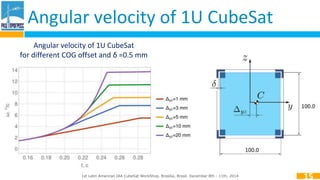




The document provides an overview of the 1U-3U+ CubeSat deployer developed by JSC Space Rocket Center Progress, detailing its mechanical design, operational history, and features. It discusses the historical context of the organization, the modular design accommodating various CubeSat sizes, and the dynamics involved in satellite separation. Additionally, it highlights the reliability and sensors integrated into the deployer system, as well as contact information for further inquiries.