


)(ˆvar( ti
Reliability Forecasting for Phase 2FailureMode](https://image.slidesharecdn.com/amultiphasedecisiononreliabilitygrowthwithlatentfailuremodes-140424035758-phpapp01/75/A-multi-phase-decision-on-reliability-growth-with-latent-failure-modes-33-2048.jpg)
)(ˆvar( ti
Reliability Forecasting for Phase 2](https://image.slidesharecdn.com/amultiphasedecisiononreliabilitygrowthwithlatentfailuremodes-140424035758-phpapp01/75/A-multi-phase-decision-on-reliability-growth-with-latent-failure-modes-36-2048.jpg)
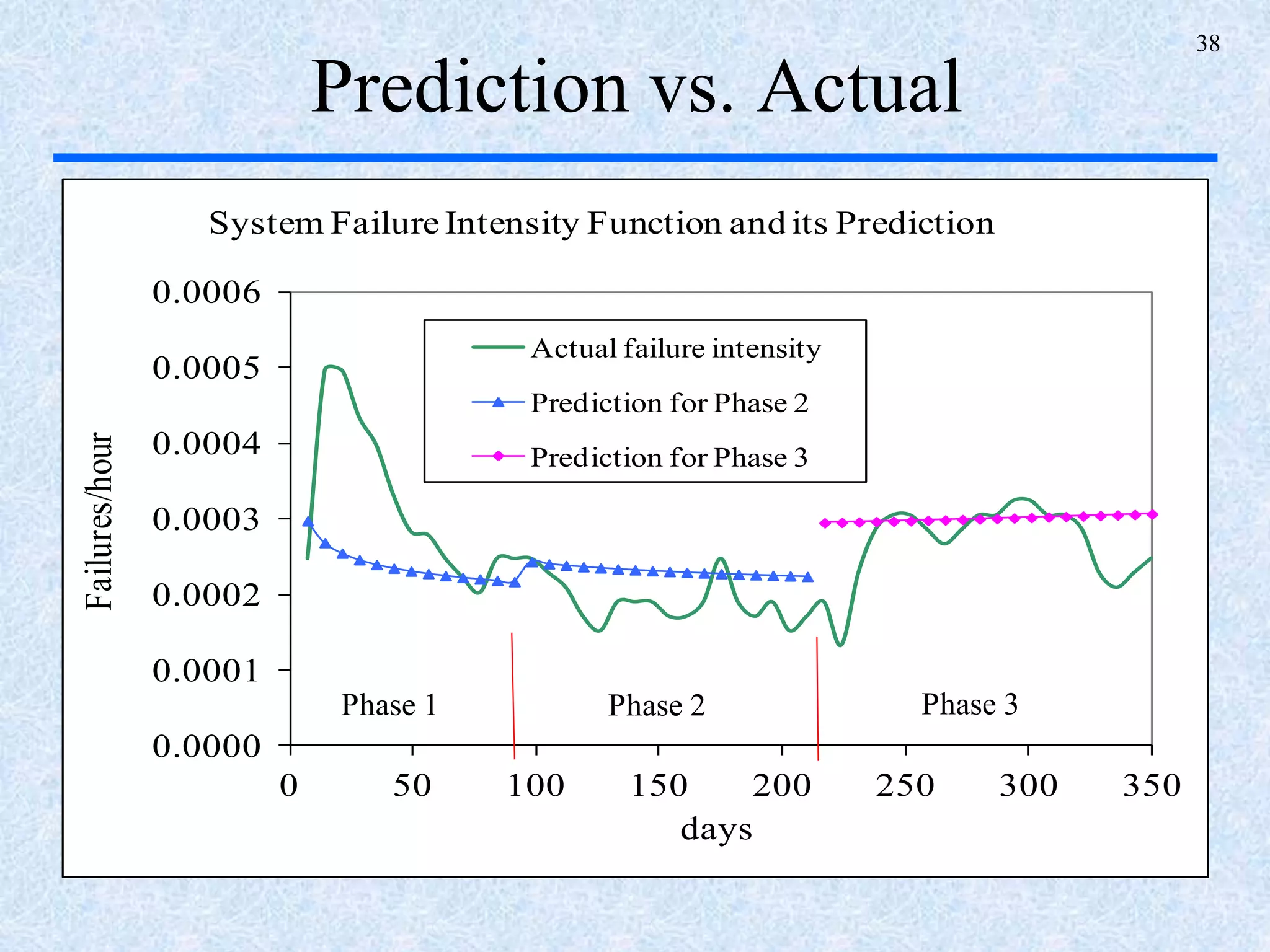

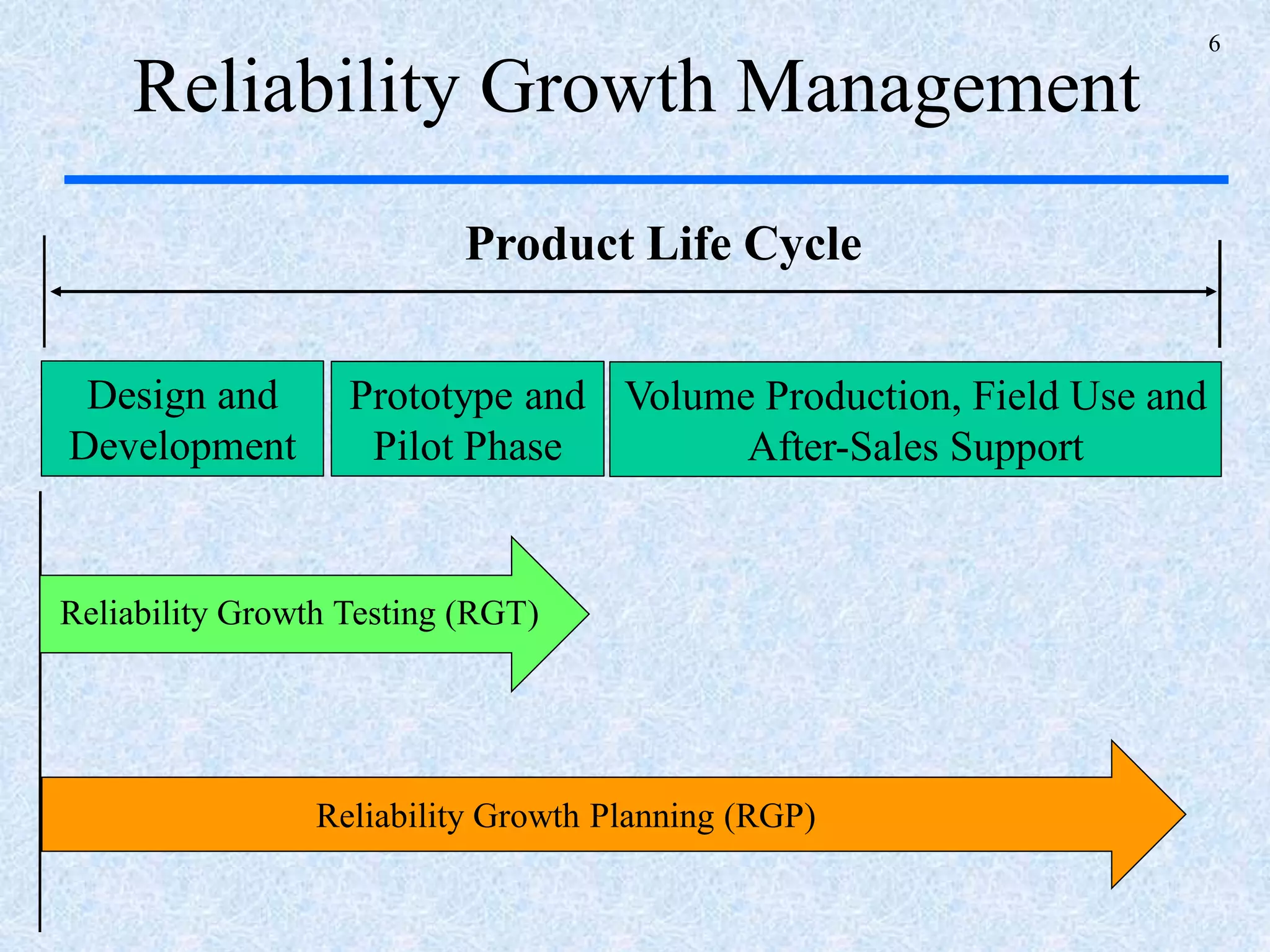
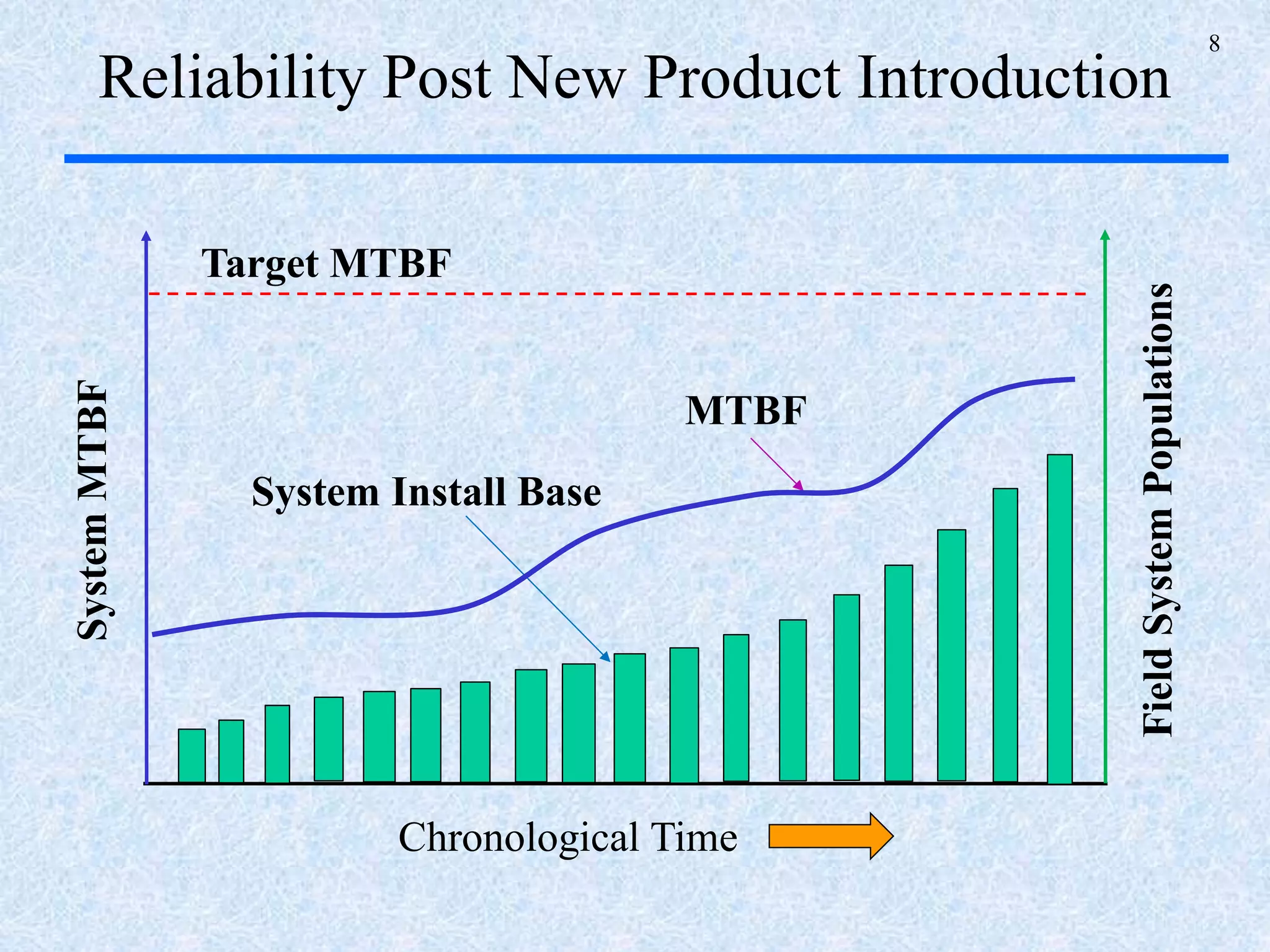
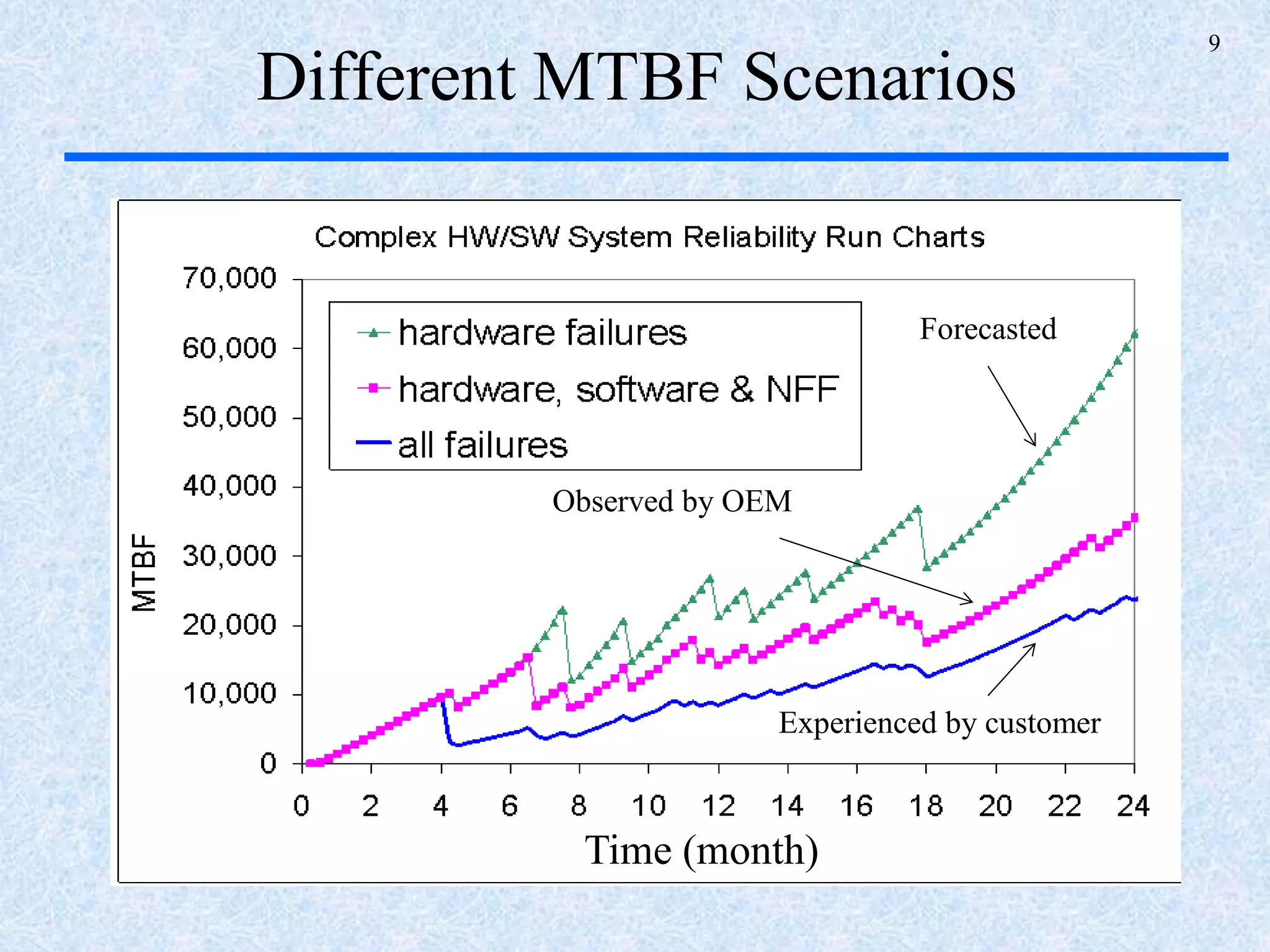
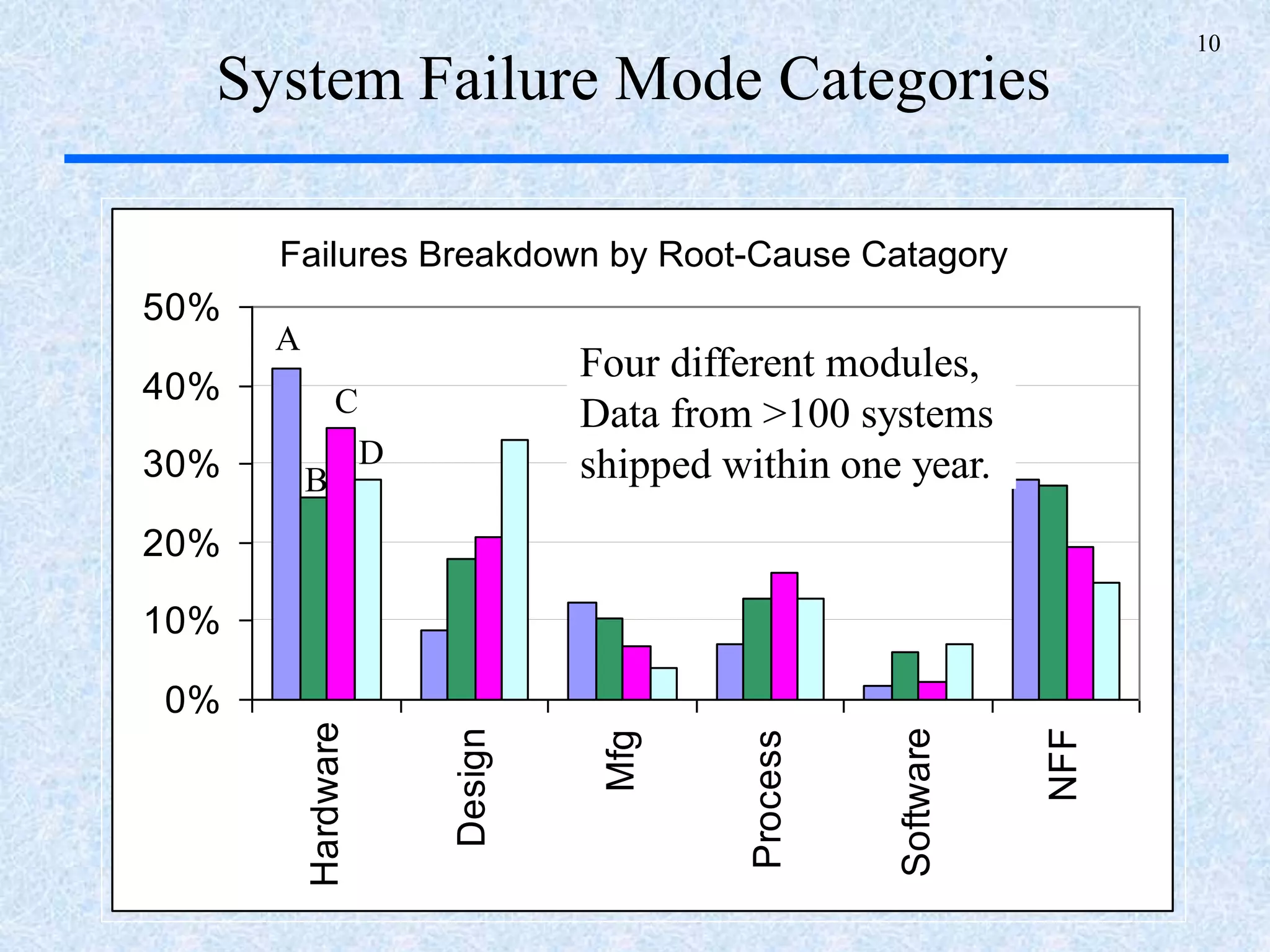
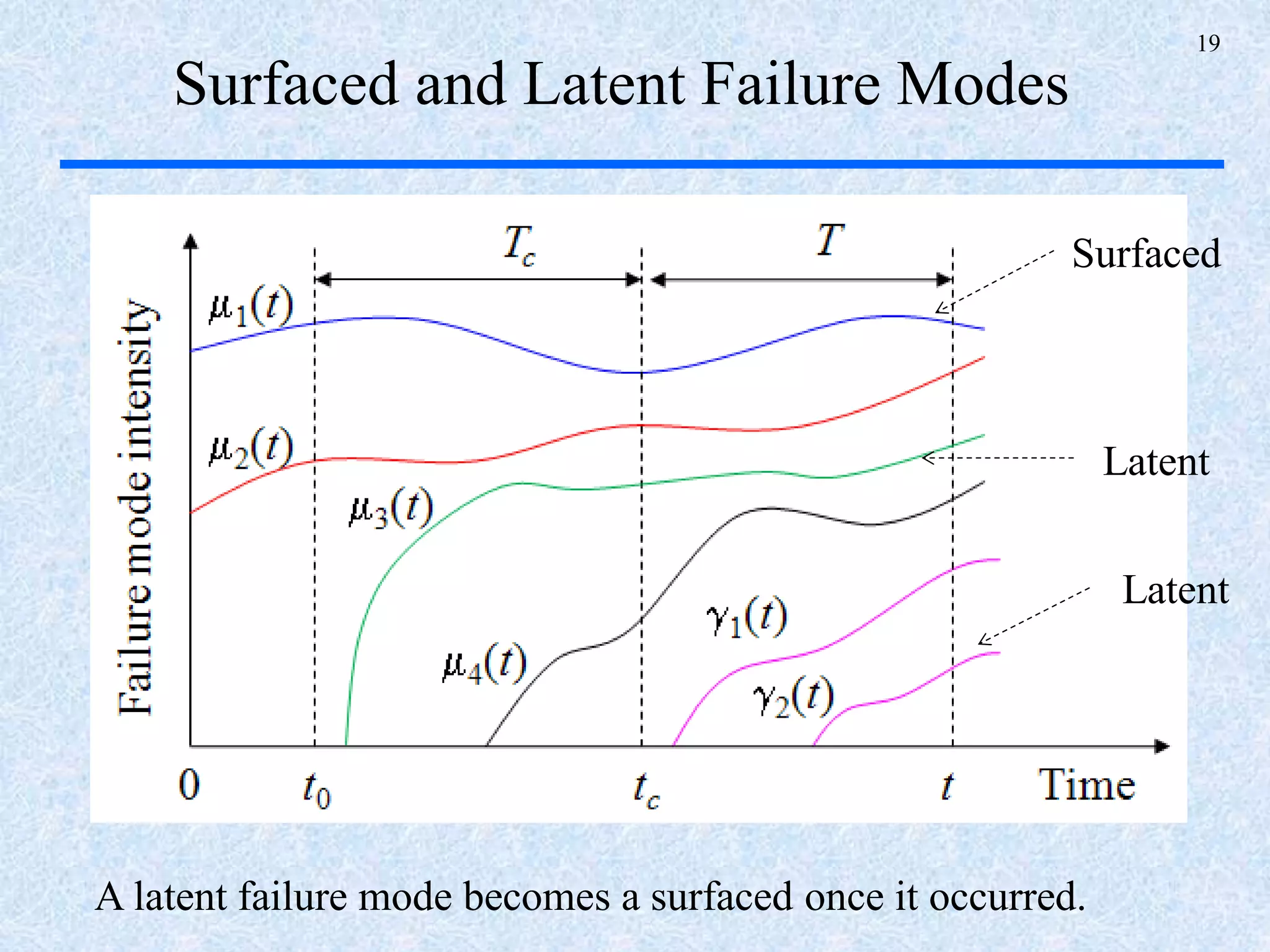
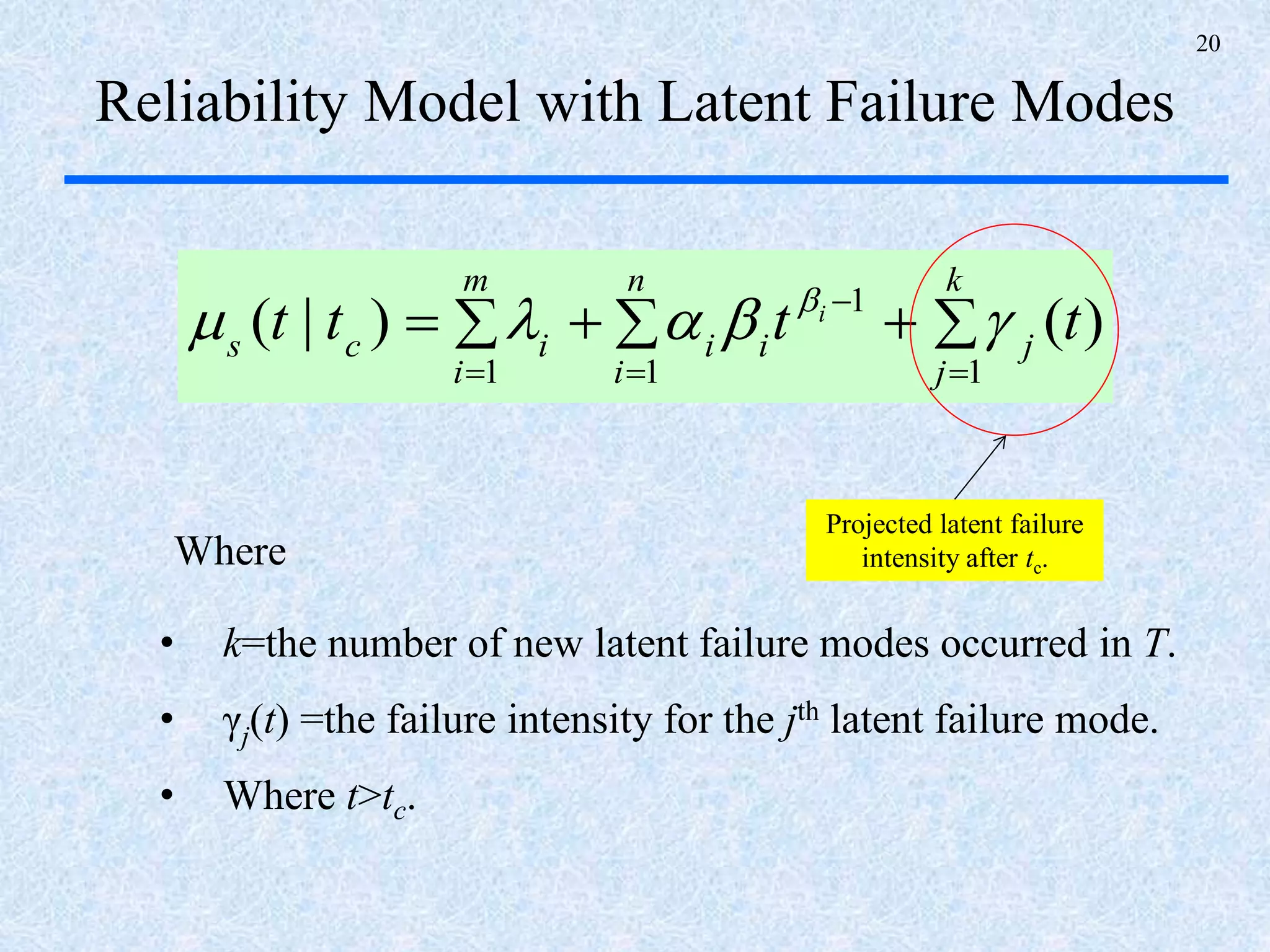
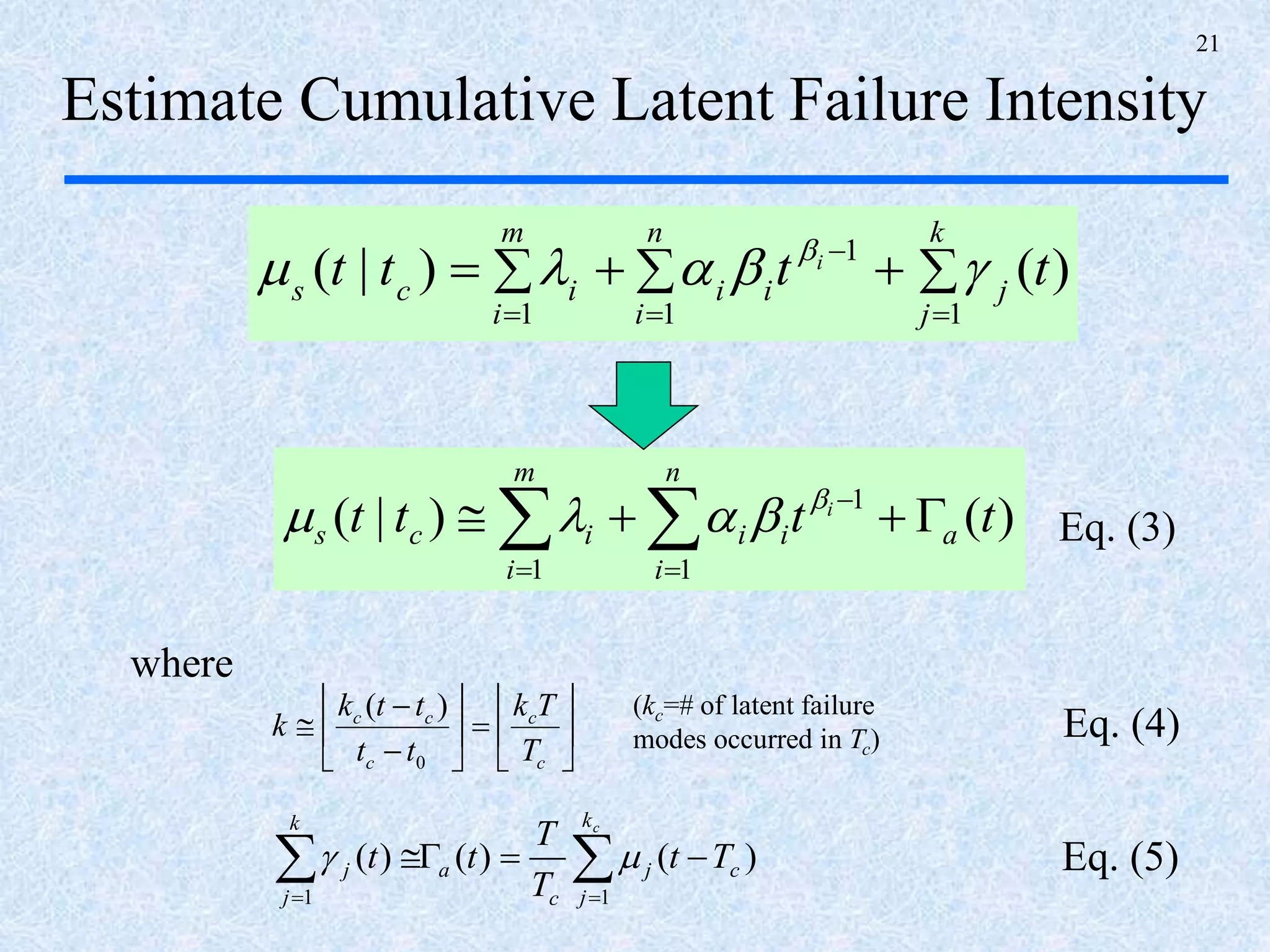
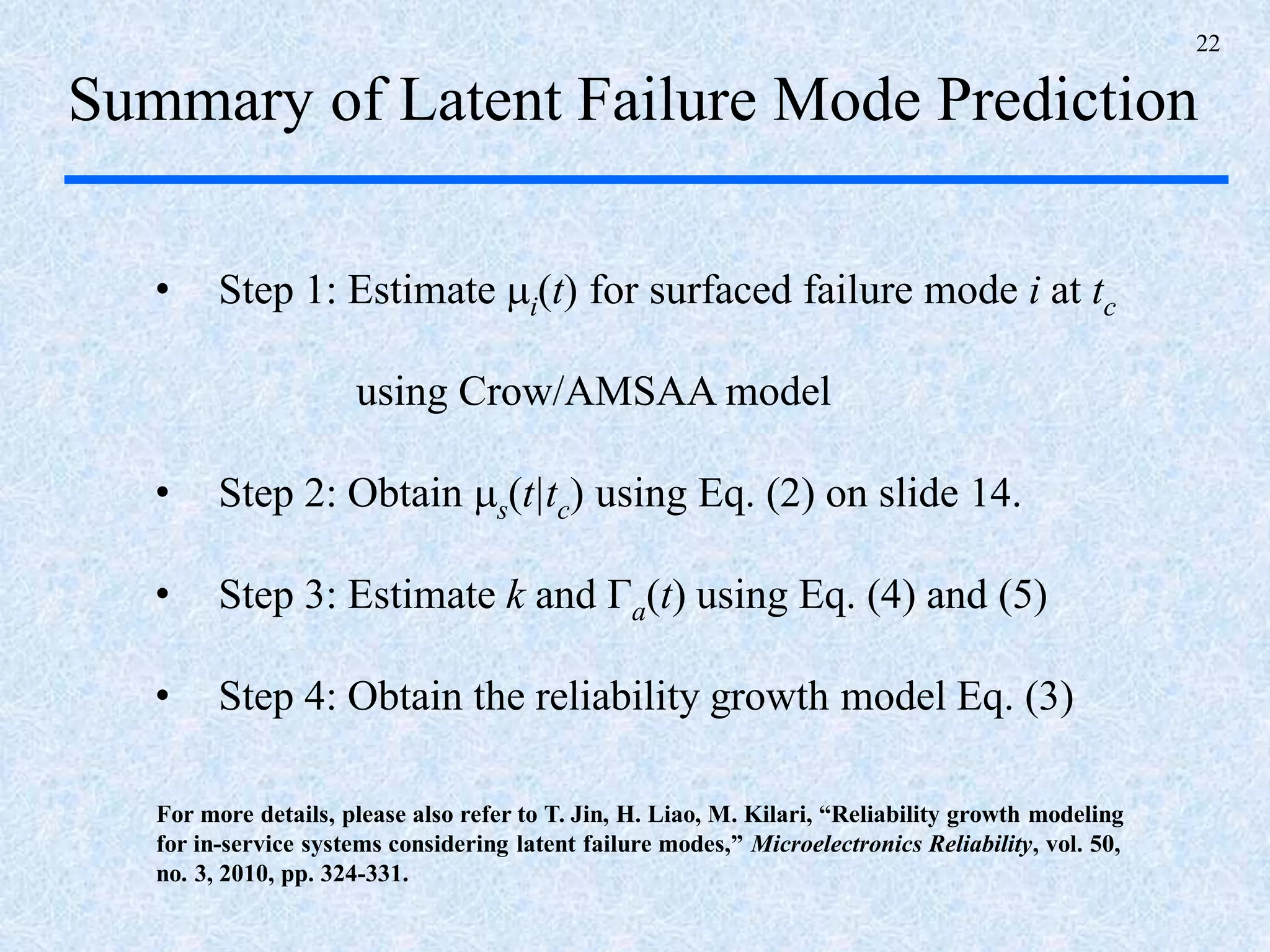
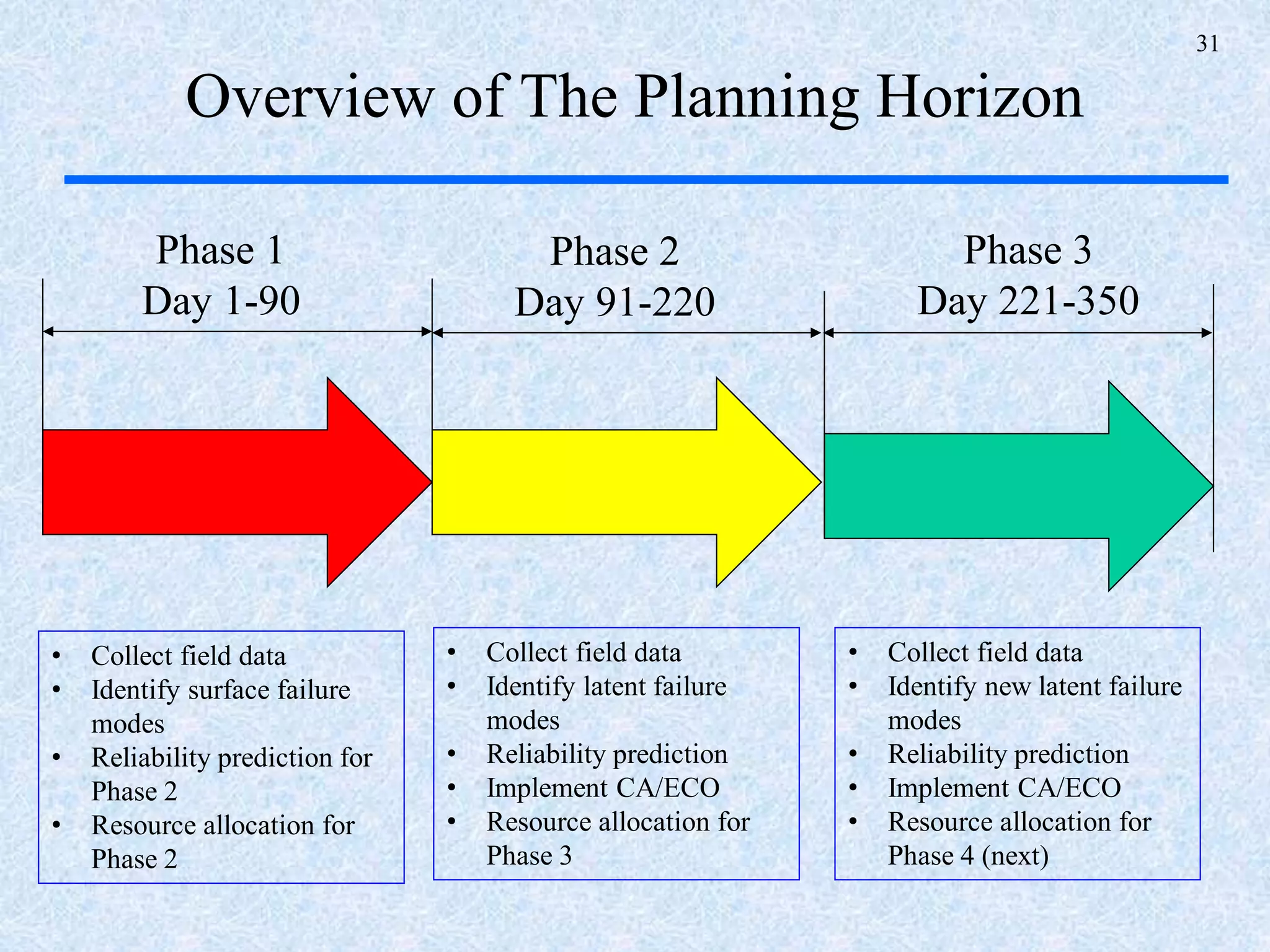
The document discusses a multi-phase approach to reliability growth planning in manufacturing, especially considering latent failure modes and their impact on electronic equipment. It outlines the need for reliability growth planning to reduce downtimes and costs while managing complex capital goods and details prediction methods for both surfaced and latent failure modes. Additionally, it presents a numerical example illustrating the allocation of resources and corrective actions to enhance reliability throughout various phases of product lifecycle.