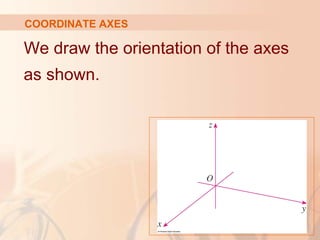
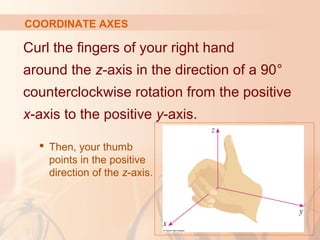
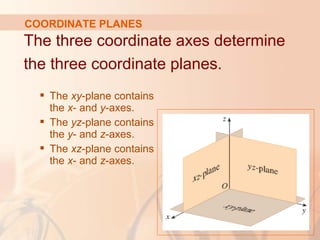
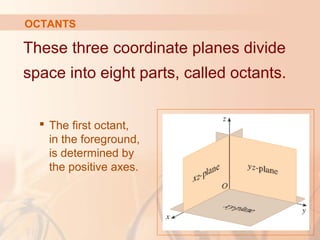
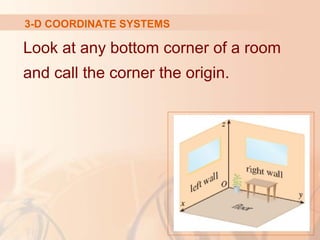
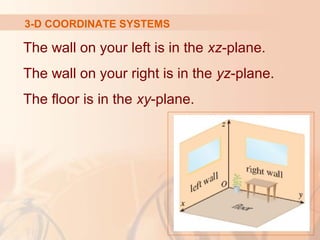
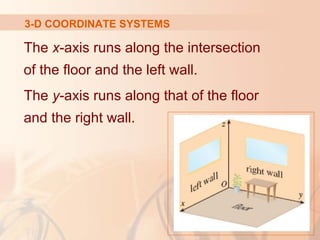
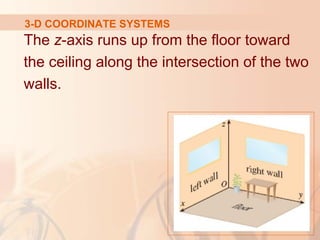
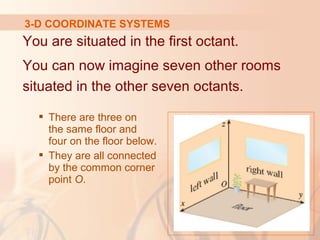
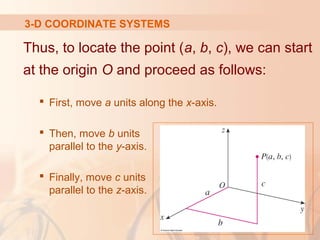
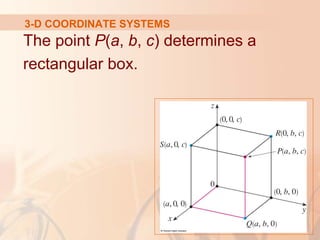
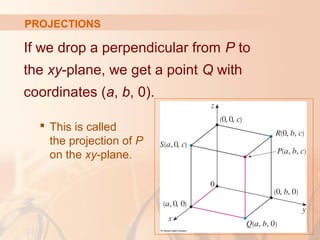
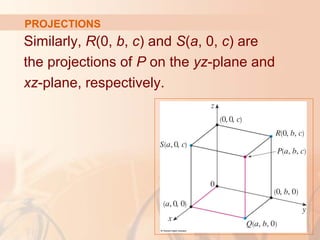
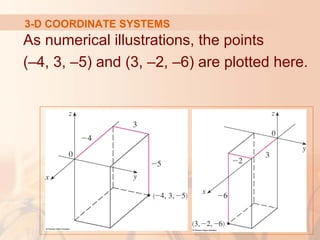
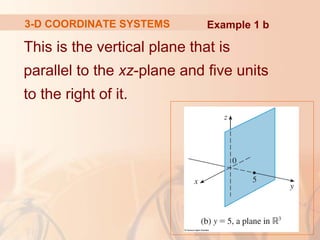
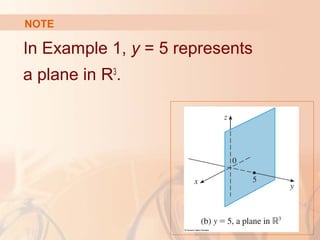
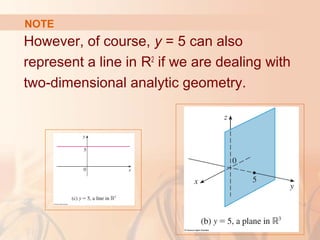
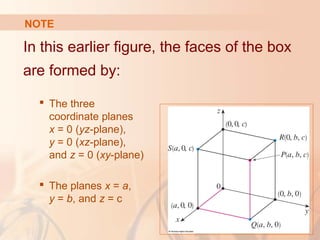
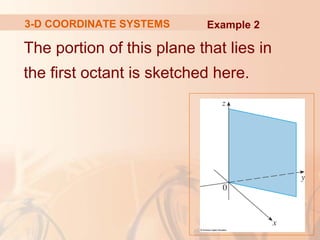
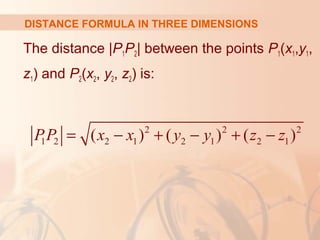
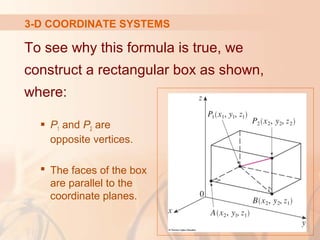
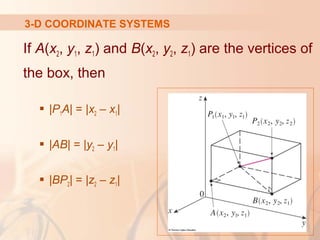
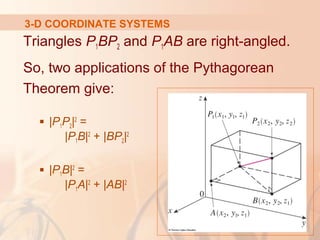
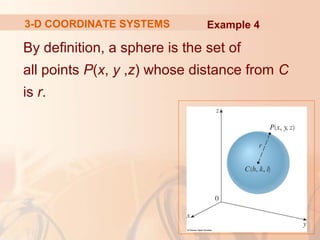
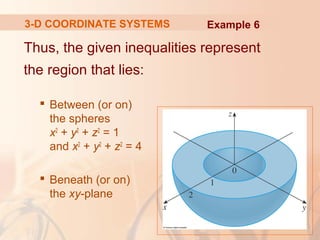
The document introduces three-dimensional coordinate systems and vectors. It discusses how three numbers (coordinates) are needed to locate a point in space, compared to two numbers in a plane. The three perpendicular axes (x, y, z) and octants for locating points are described. Equations representing planes and spheres in three-dimensional space are examined.
















































































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)





