An inertial navigation system (INS) uses gyroscopes and accelerometers to determine the position, orientation, and velocity of a moving object without needing any external references. It provides accurate positioning, velocity, attitude, and heading information by measuring linear acceleration and angular motion. The basic components are a stable platform, accelerometers to measure specific acceleration components, integrators to calculate velocity and position from acceleration measurements, and a computer to process the signals and output navigation solutions like latitude and longitude.
Introduction
• High accuracy
•Self-contained
• Autonomous – does not depend on other systems
• Passive – does not radiate
• Unjammable
• Does not require reference to the ground or outside world.
3.
Introduction
The INS canprovide:
– Accurate position in whatever coordinates are required – e.g. latitude/ longitude, etc.
– Ground speed and track angle.
– Euler angles: heading, pitch and roll to very high accuracy.
– Aircraft velocity vector
• The self-contained characteristics of an inertial navigation system plus the ability
to provide a very accurate attitude and heading reference led to the installation of
IN systems in long range civil transport aircraft
Introduction
• The basicprinciples of any IN system are to derive the components of the
aircraft’s acceleration along locally level axes, generally the North and East axes,
using an orthogonal set of accelerometers and gyros to measure the aircraft’s
motion.
• Integration with respect to time of these acceleration components then gives the
aircraft’s North and East velocity components, knowing the initial conditions.
• The aircraft’s position in terms of its latitude and longitude coordinates can then
be derived
6.
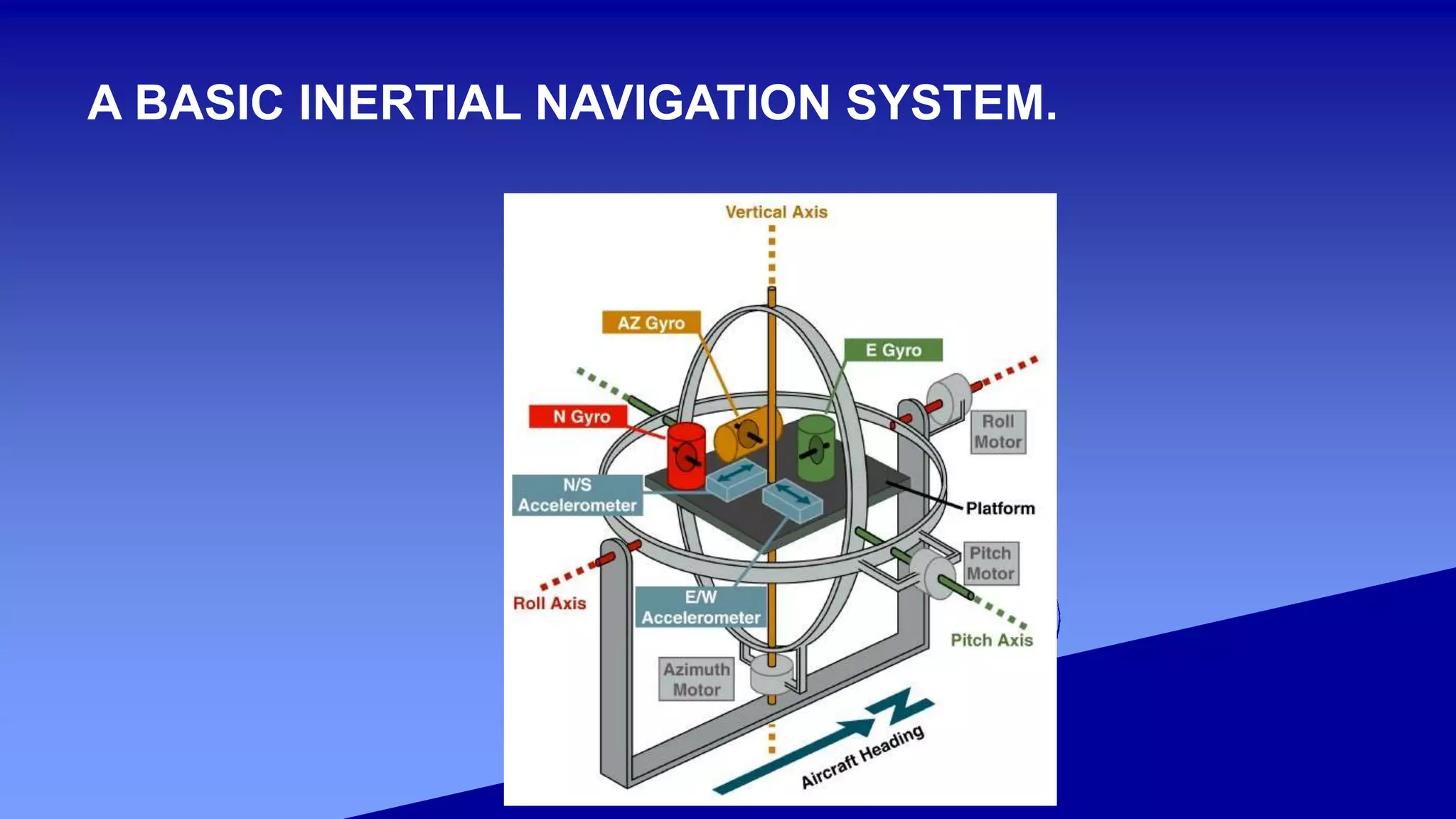
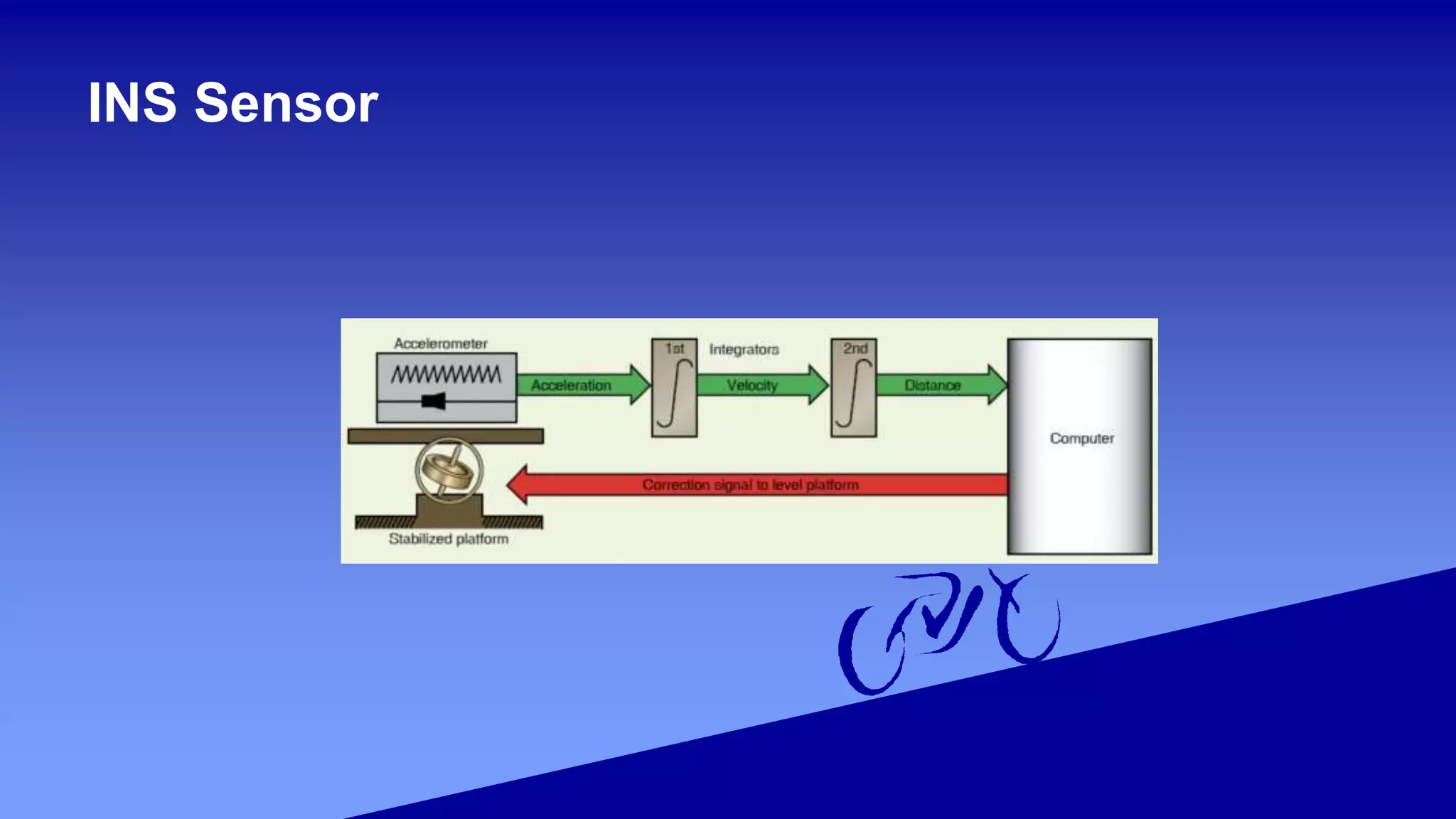
Basic Components
• Astable platform oriented to maintain the accelerometers horizontal to
the Earth and to provide azimuth orientation.
• The accelerometers arranged on the stable platform to supply specific
components of acceleration.
• The integrators to receive the output from the accelerometers and to
calculate velocity by integrating acceleration once and integrating again
to calculate the distance.
• A computer to receive the signals from the integrators and to change to
distance travelled into latitude and longitude.
Inertial Sensors
• Inertialsensors are associated with the detection of motion in a
universal (non-Earth) referenced set.
• Inertial sensors comprise:
– position gyroscopes;
– rate gyroscopes;
– accelerometers.
9.
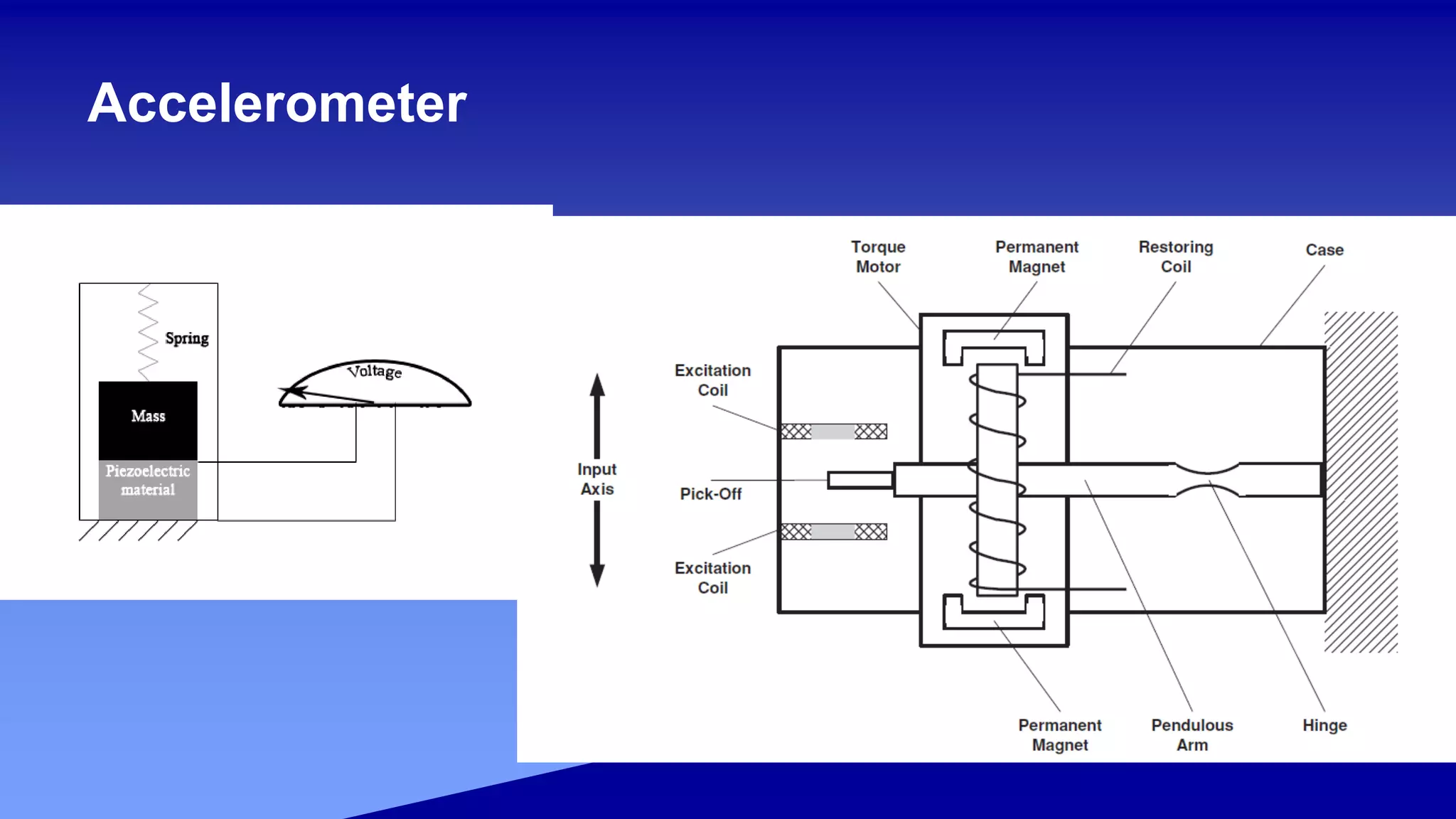
Accelerometer
• The basicprinciples upon which the accelerometers operate are related
to Newton's laws regarding motion.
• Linear accelerometers measure object’s linear acceleration and
therefore detect direction of object’s movement.
• Most accelerometers are able to measure acceleration along one axis.
• In an inertial navigation system, two or three accelerometers are used.
• One will measure the aircraft’s accelerations in the North-South
directions.
• Second one will measure the aircraft’s accelerations in the East-West
directions.
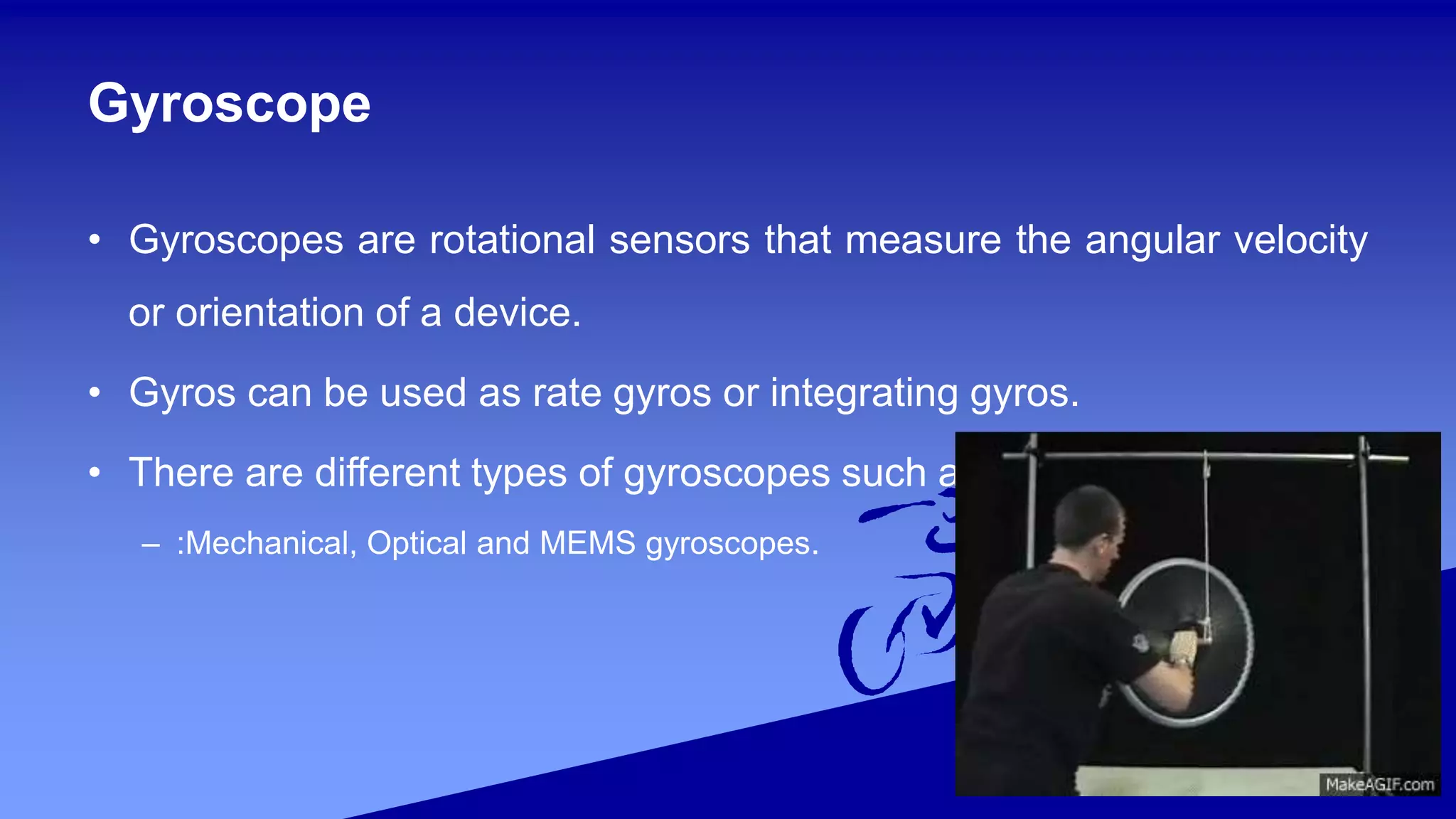
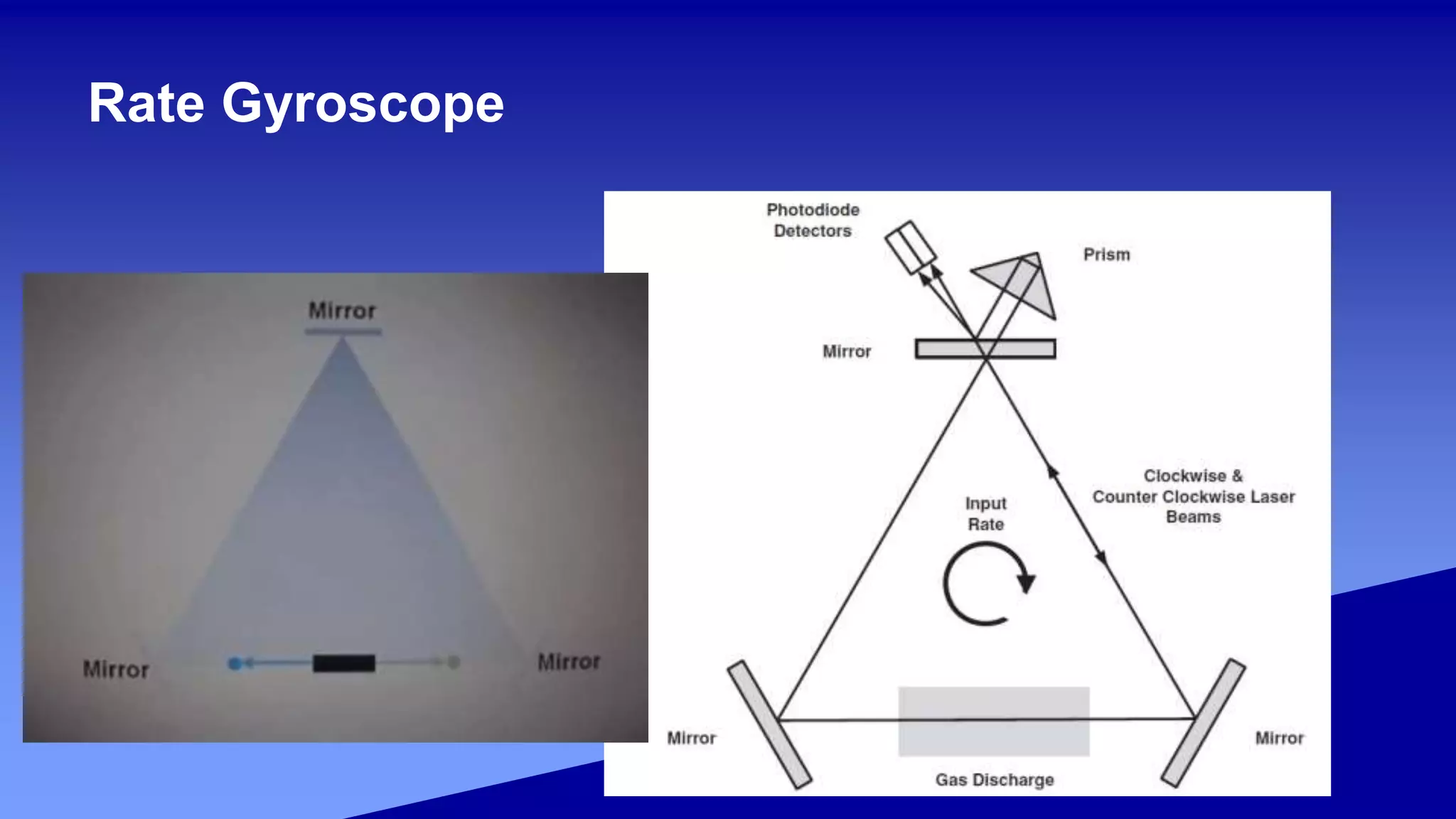
Gyroscope
• Gyroscopes arerotational sensors that measure the angular velocity
or orientation of a device.
• Gyros can be used as rate gyros or integrating gyros.
• There are different types of gyroscopes such as
– :Mechanical, Optical and MEMS gyroscopes.

















































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)
















