Downloaded 30 times



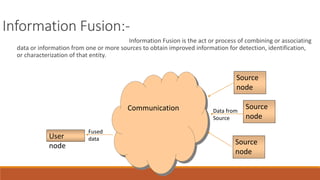
















This document discusses information fusion in distributed systems. It defines information fusion as combining data or information from multiple sources to improve detection, identification, or characterization. It describes two types of fusion - data fusion, which combines raw sensor data, and information fusion, which combines already processed data. It also discusses different classifications of fusion techniques, including the level of abstraction (low, medium, high), relationships between data sources (complementary, redundant, cooperative), and Dasarathy's classification. Finally, it outlines common information fusion architectures like centralized, decentralized, and hierarchical, and applications of information fusion.