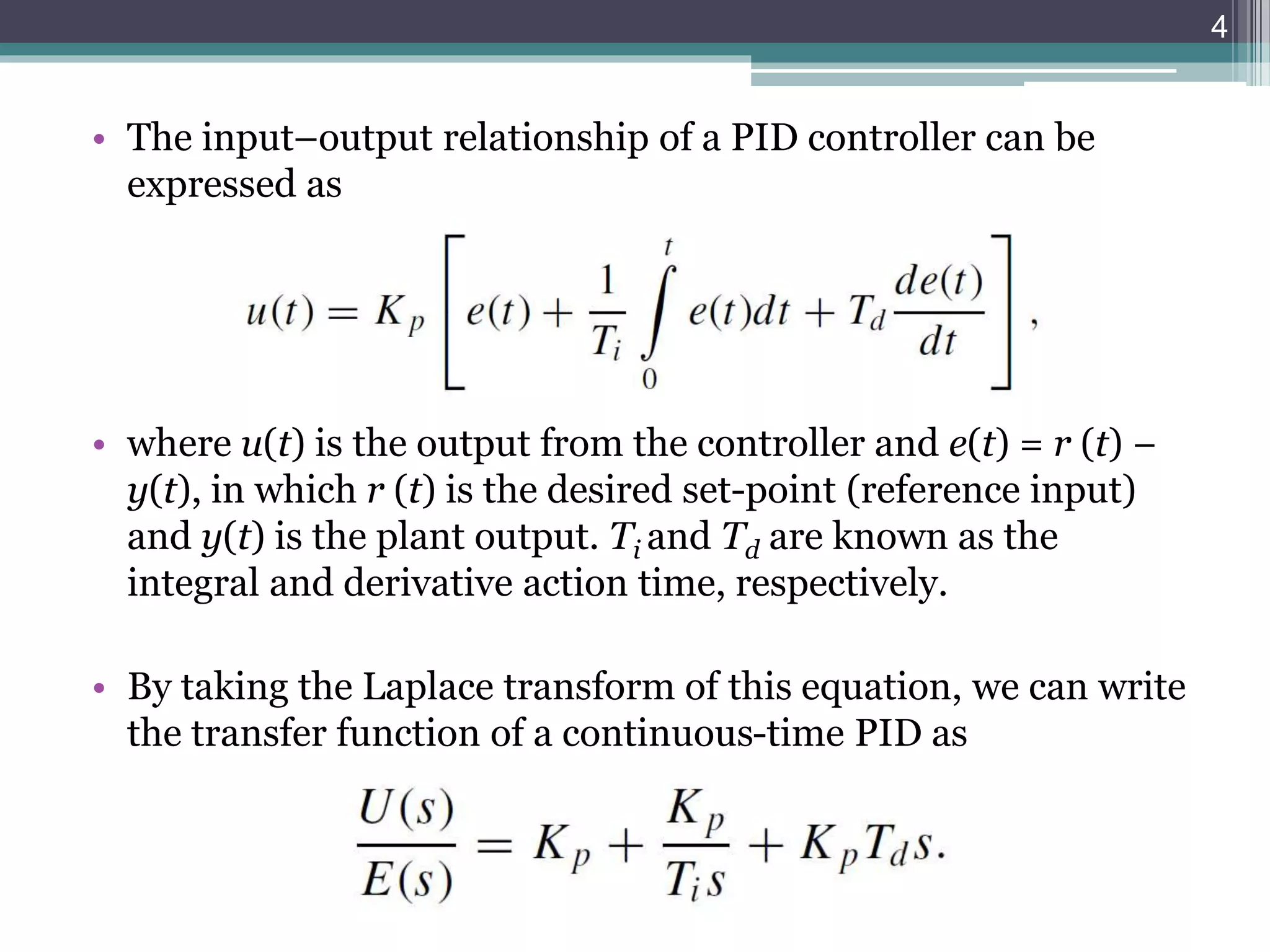
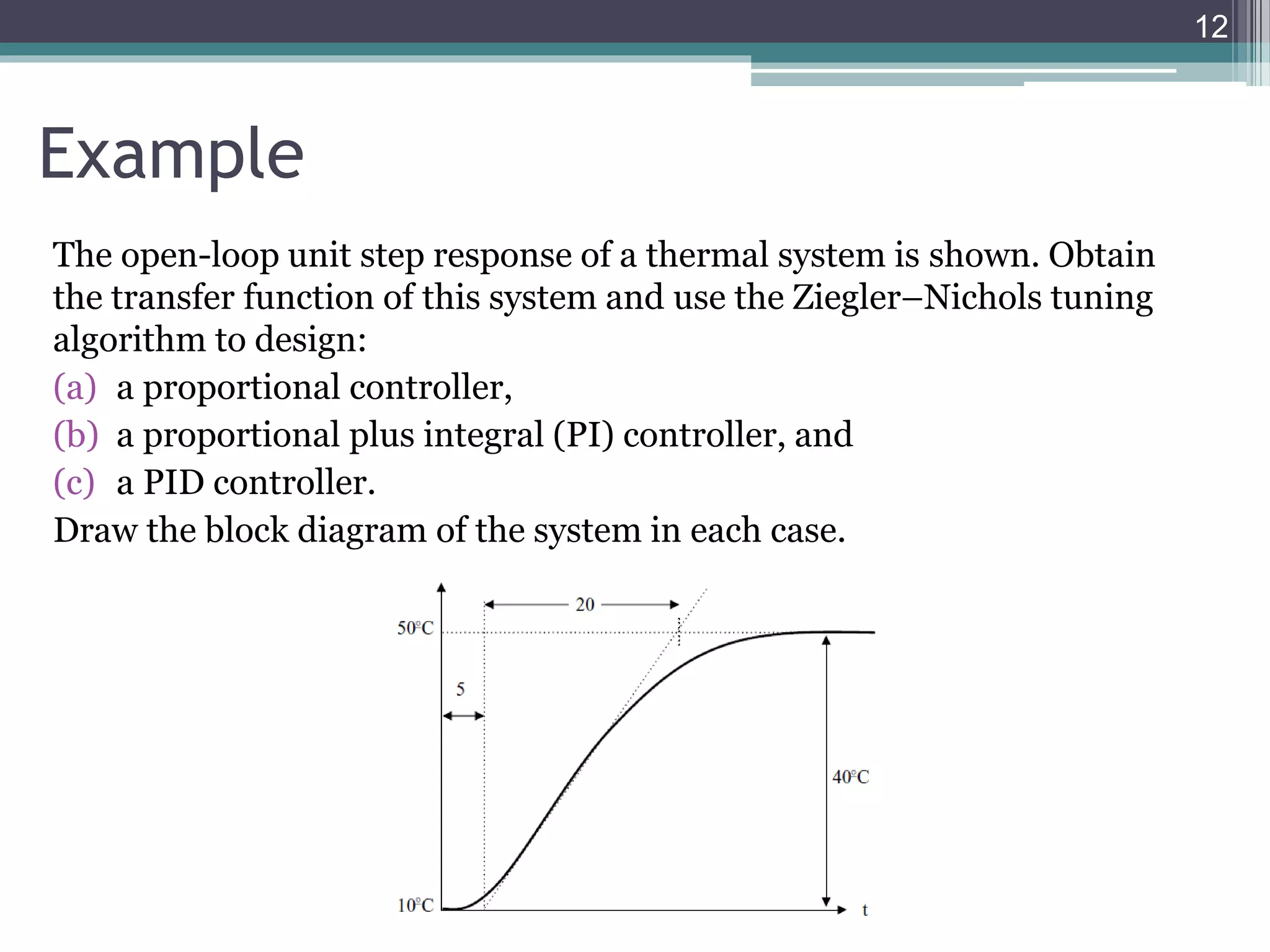
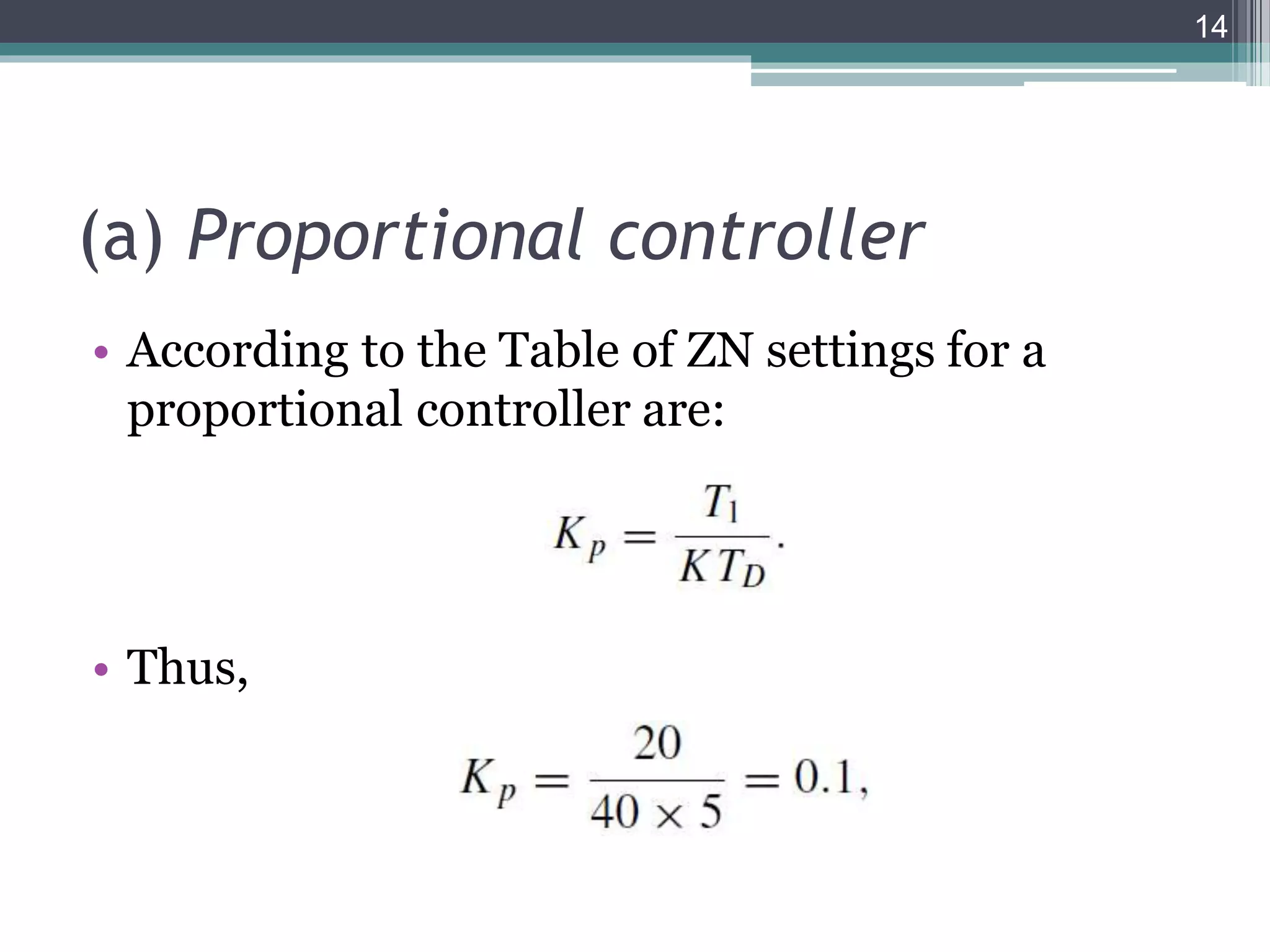
This document discusses PID (proportional-integral-derivative) controllers. It explains that PID controllers use three terms: proportional to the error, integral of the error, and derivative of the error. The document provides equations for continuous and discrete PID controllers. It also describes Ziegler-Nichols tuning, which is a common method for adjusting the PID parameters (Kp, Ti, Td) based on open-loop step response testing of the plant. Ziegler-Nichols tuning values are given for proportional, PI, and PID controllers to minimize error. An example problem demonstrates identifying plant parameters from step response data and applying Ziegler-Nichols tuning to design proportional, PI, and PID controllers.



![• Using these approximations, we can write:
𝑢 𝑛𝑇 = 𝐾𝑝[𝑒 𝑛𝑇 +
1
𝑇𝑖
𝑘=1
𝑛
𝑇𝑒 𝑘𝑇 + 𝑇𝑑
𝑒 𝑛𝑇 −𝑒(𝑛𝑇−𝑇)
𝑇
],
𝑢 𝑛𝑇 − 𝑇 = 𝐾𝑝[𝑒 𝑛𝑇 − 𝑇 +
1
𝑇𝑖
𝑘=1
𝑛−1
𝑇𝑒 𝑘𝑇 + 𝑇𝑑
𝑒 𝑛𝑇−𝑇 −𝑒(𝑛𝑇−2𝑇)
𝑇
].
• Subtracting these two equations, we obtain:
𝑢𝑛 = 𝑢𝑛−1 + 𝐾𝑝 𝑒𝑛 − 𝑒𝑛−1 +
𝐾𝑝𝑇
𝑇𝑖
𝑒𝑛 +
𝐾𝑝𝑇𝑑
𝑇
[𝑒𝑛 − 2𝑒𝑛−1 + 𝑒𝑛−2]
where 𝑢𝑛: = 𝑢(𝑛𝑇) and 𝑢𝑛−1: = 𝑢 𝑛𝑇 − 𝑇 .
• The PID is now in a suitable form which can be implemented on a digital
computer. Here the current control action uses the previous control value
as a reference.
7](https://image.slidesharecdn.com/1578385-221105091910-1dfc2958/75/1578385-ppt-7-2048.jpg)























![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)
![Digital Signal Processing[ECEG-3171]-Ch1_L07](https://cdn.slidesharecdn.com/ss_thumbnails/dspl7ch3-180427094425-thumbnail.jpg?width=640&height=640&fit=bounds)