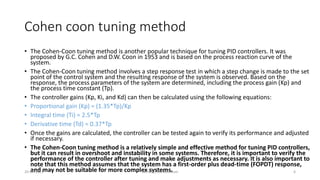
The document discusses various types of controllers used in industrial control applications. It describes PI, PD, and PID controllers, which use proportional, integral, and derivative terms to adjust the control signal. Ziegler-Nichols and Cohen-Coon tuning methods are presented for optimizing controller parameters. Both analog and digital implementations of PID controllers are discussed.