The document discusses Laplace transforms and their properties and applications in modeling dynamic systems. It covers:
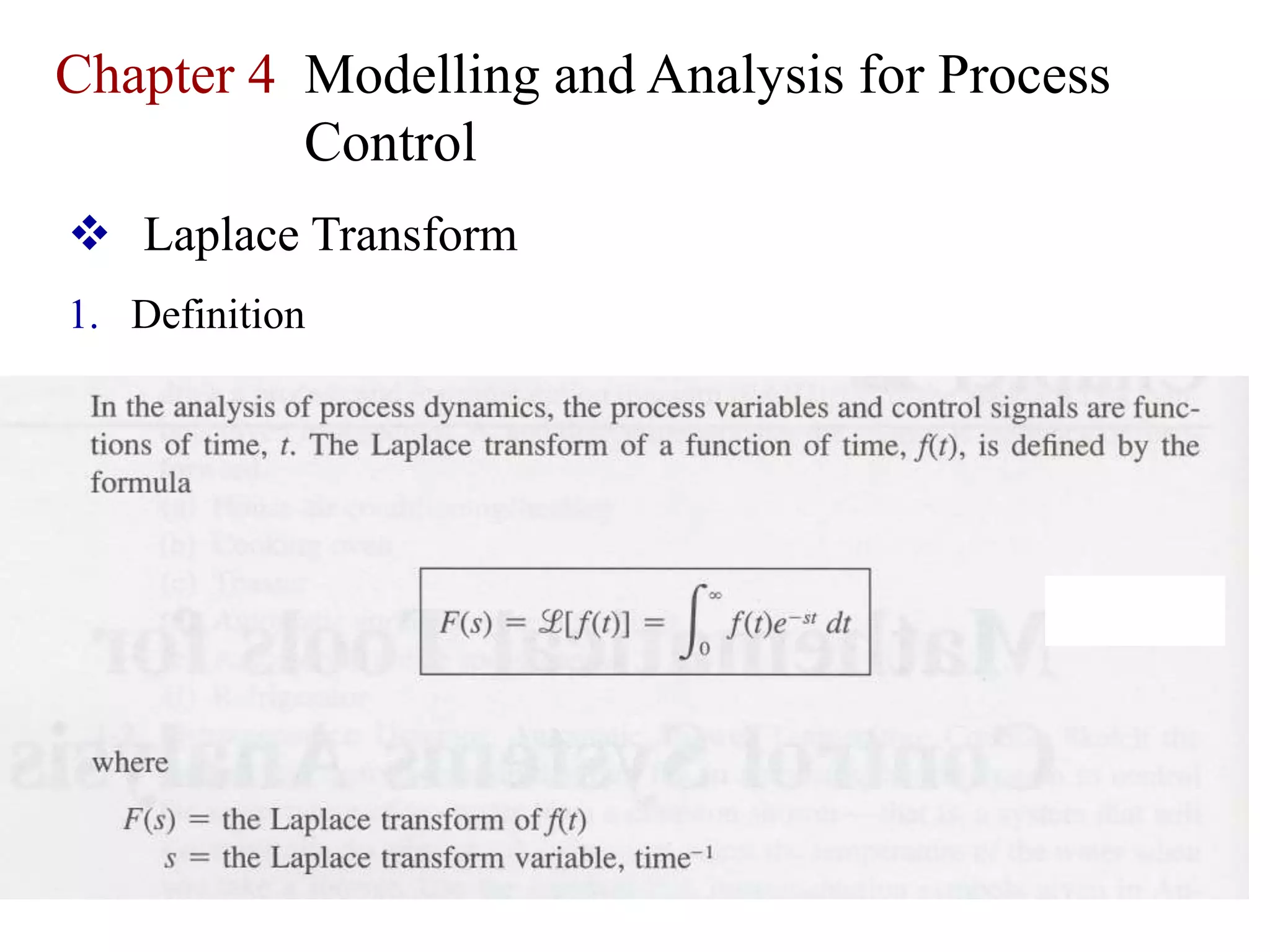
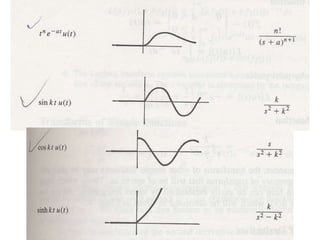
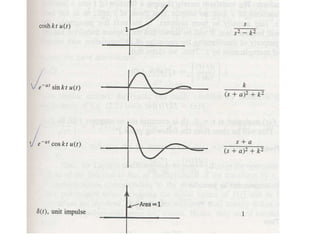
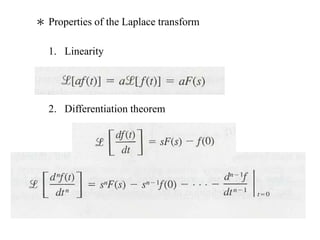
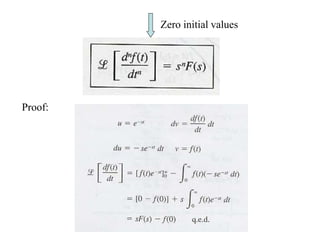
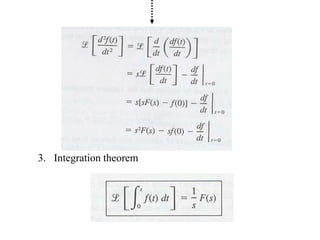
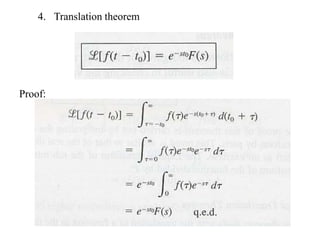
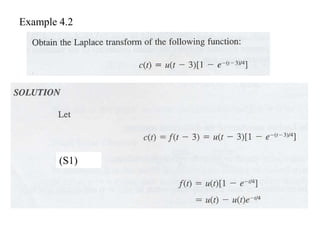
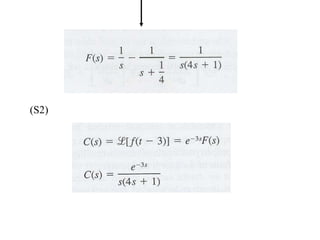
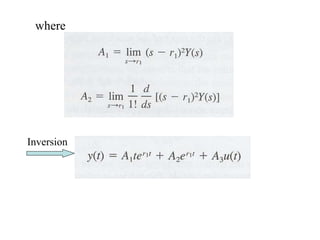
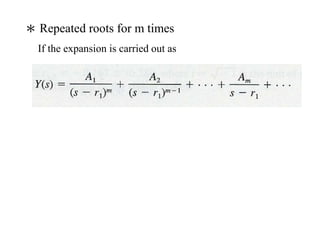
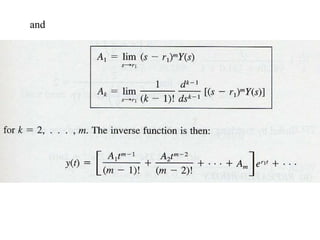
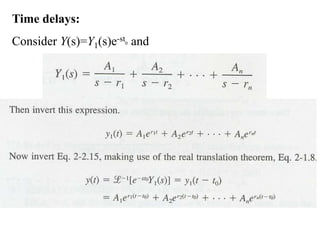
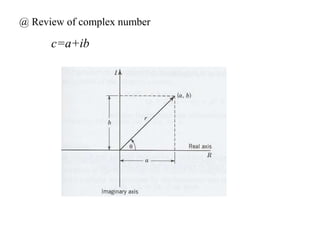
1) Definition of the Laplace transform and properties including linearity, differentiation, integration, and translations.
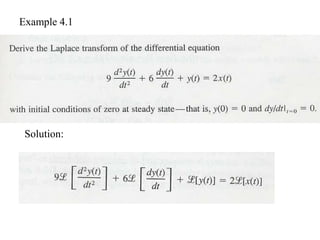
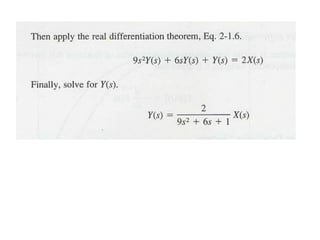
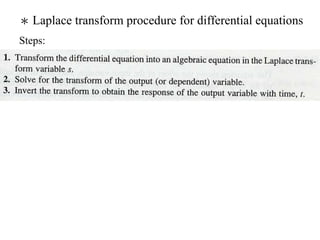
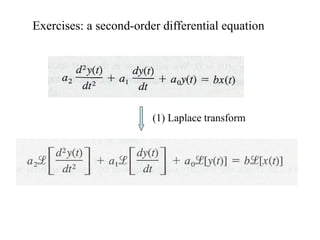
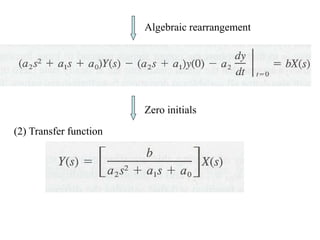
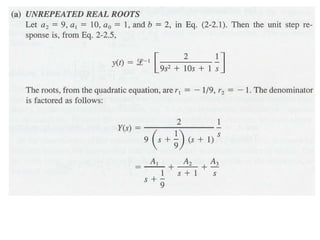
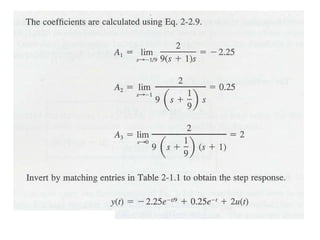
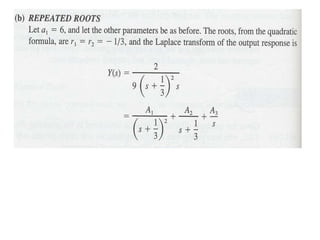
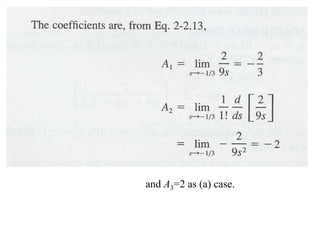
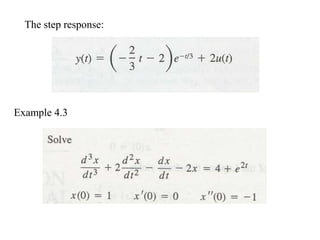
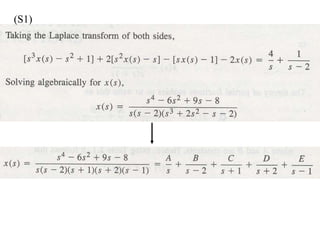
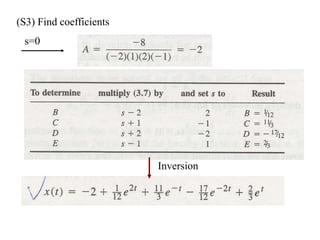
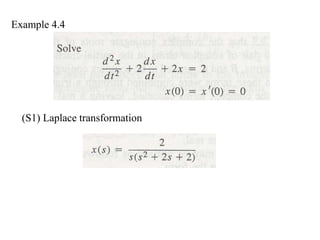
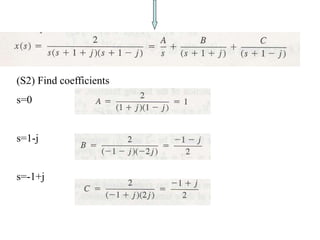
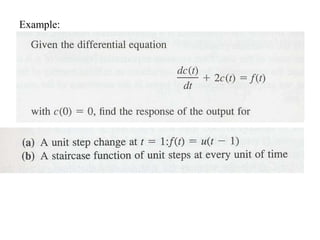
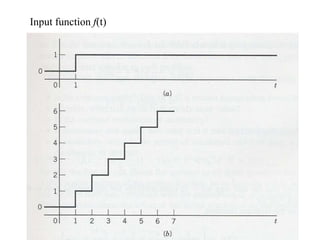
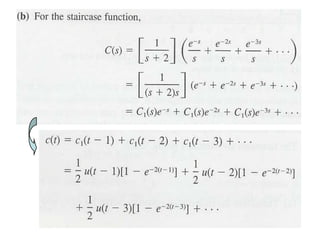
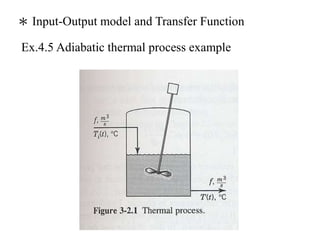
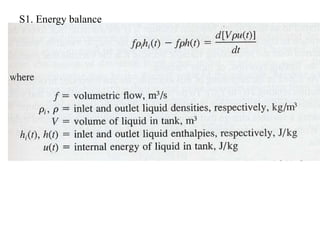
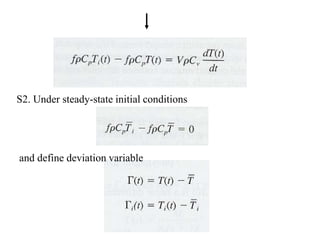
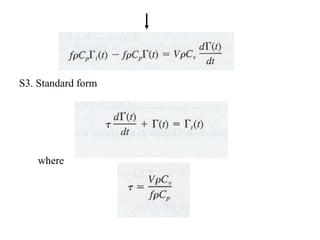
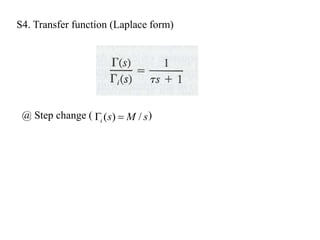
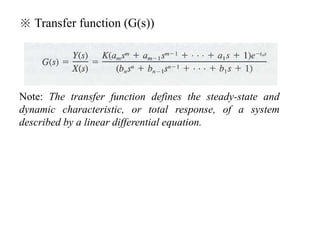
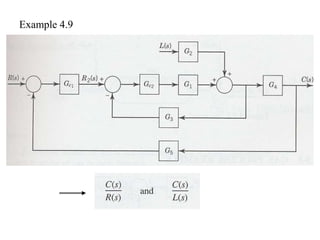
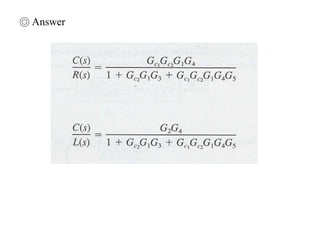
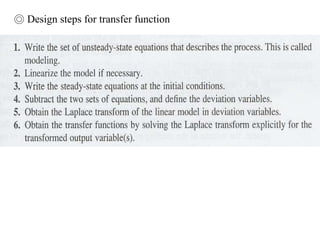
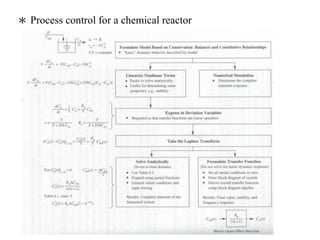
2) Using Laplace transforms to derive transfer functions from differential equations describing dynamic systems.
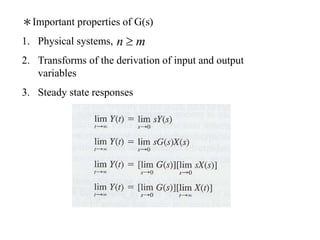
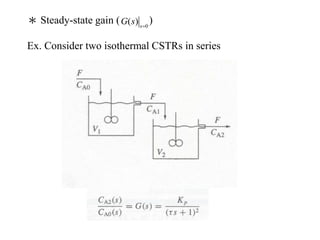
3) The meaning and uses of transfer functions to characterize steady-state gains and dynamic responses of systems.
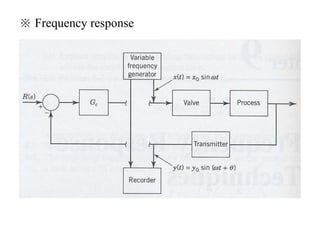
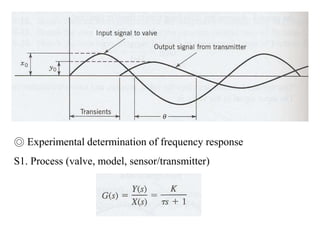
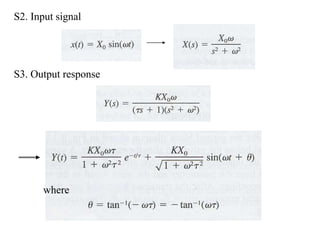
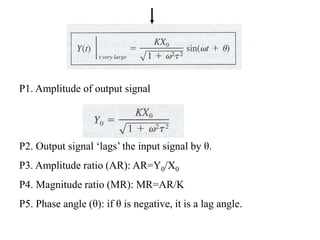
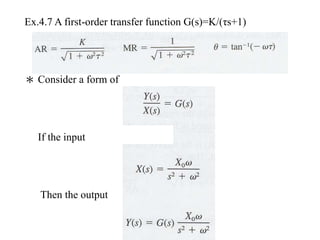
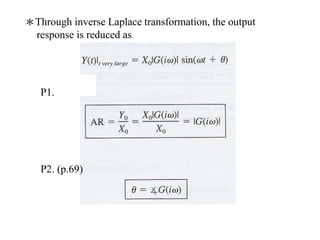
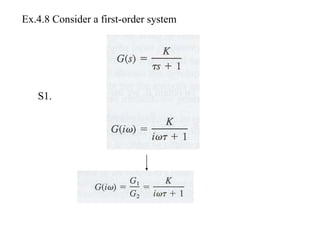
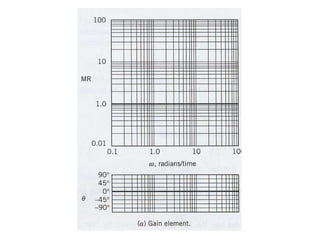
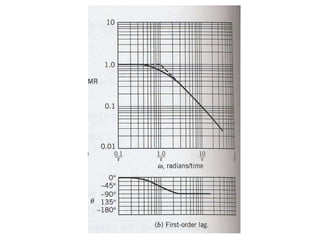
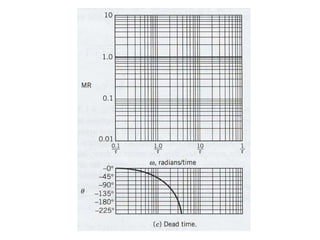
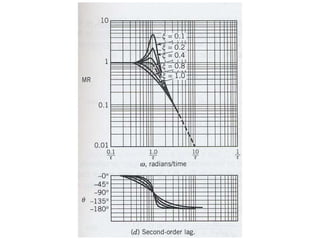
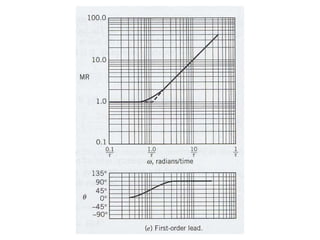
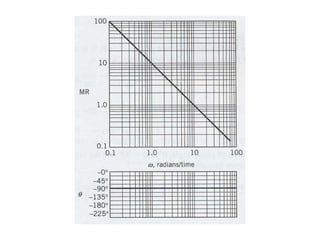
4) Determining amplitude ratios and phase angles from transfer functions to analyze frequency responses.
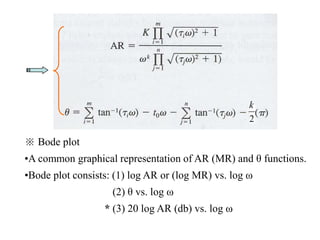
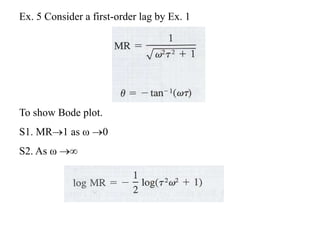
5) Creating Bode plots to graphically represent frequency responses on logarithmic scales.



































![CHAPTER LAPLACE TRANSFORM [Được lưu tự động].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapterlaplacetransformclutng-230102000908-d6e0e181-thumbnail.jpg?width=640&height=640&fit=bounds)