The document discusses PID controllers, including:
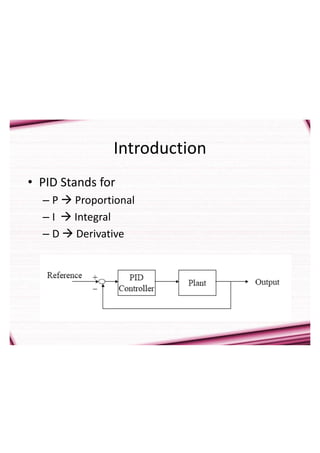
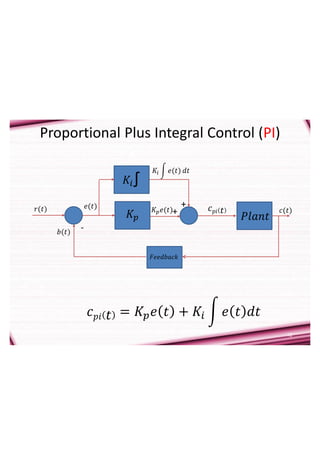
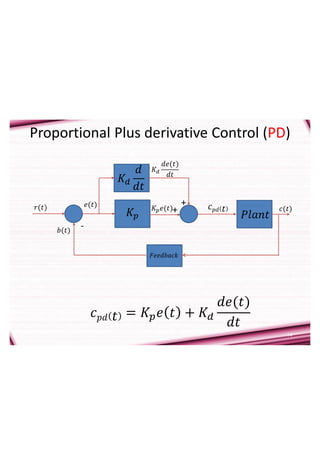
1) PID controllers use proportional, integral and derivative modes to control systems. The proportional mode determines how much correction is made, the integral mode determines how long a correction is applied, and the derivative mode determines how fast a correction is made.
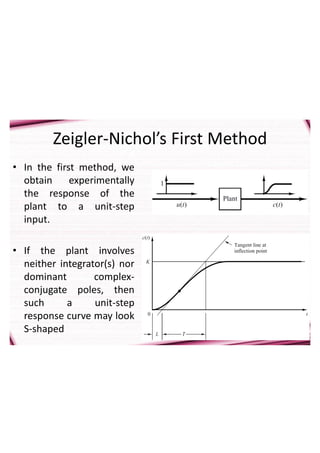
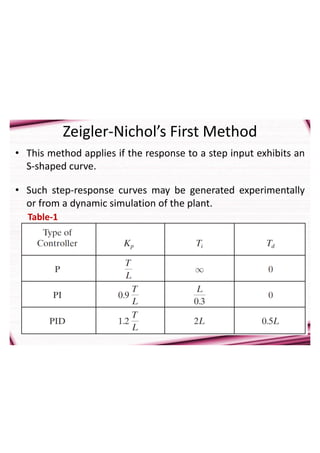
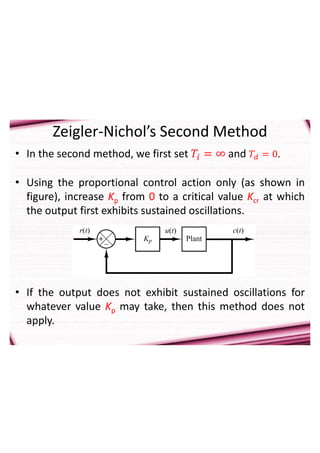
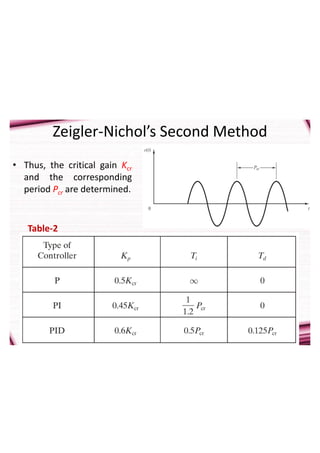
2) Ziegler-Nichols tuning rules provide methods to experimentally determine PID parameters (Kp, Ti, Td) when mathematical models are unknown, including open-loop and closed-loop methods using a plant's step response.
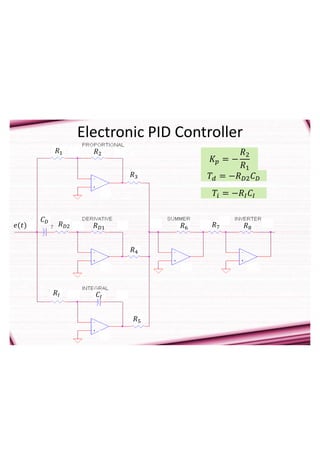
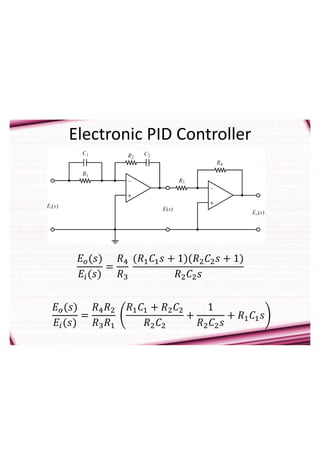
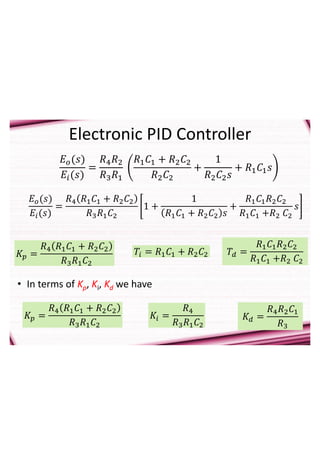
3) An electronic PID controller can be implemented as a circuit using resistors and capacitors to realize the proportional, integral and derivative terms.