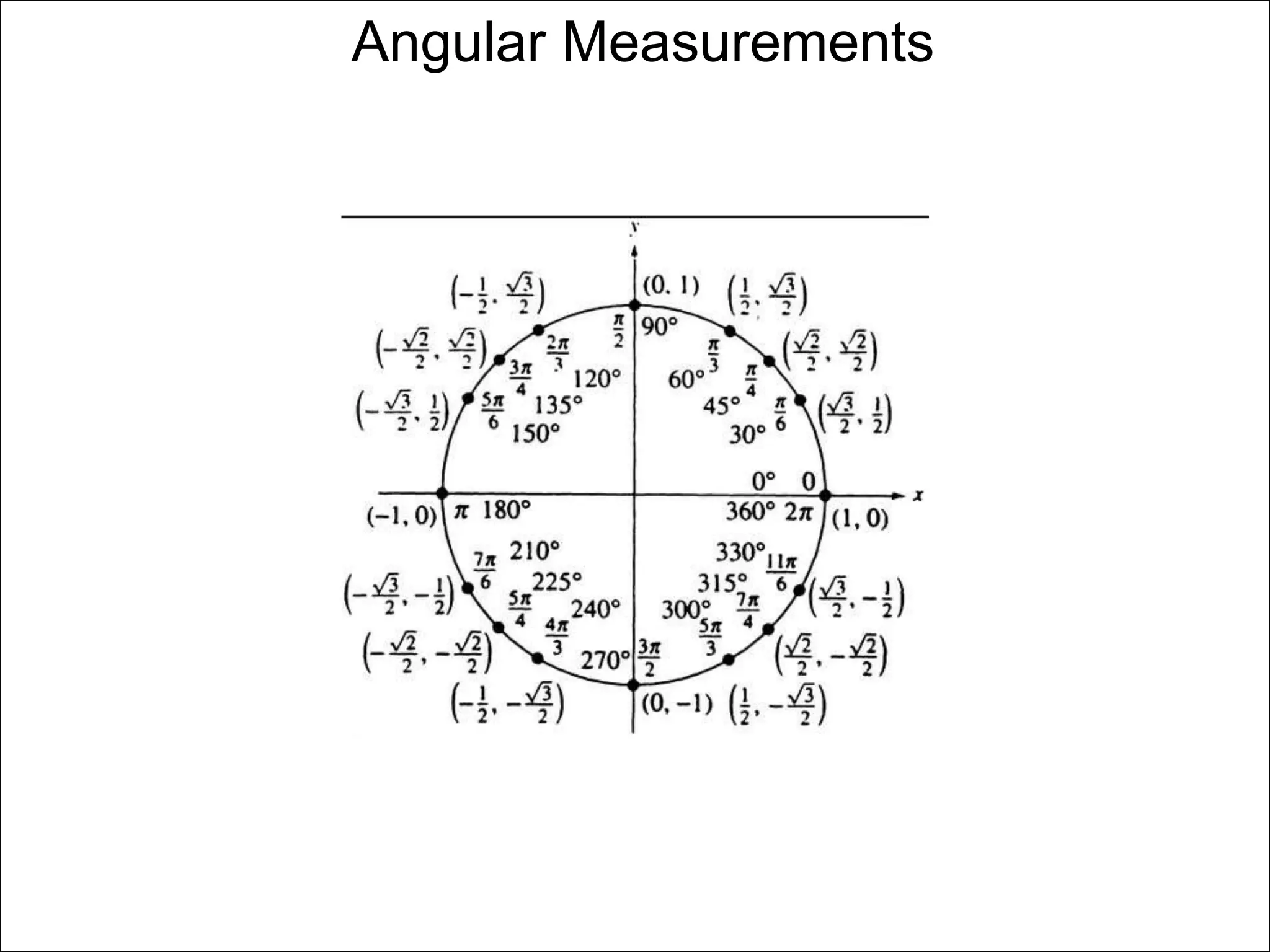
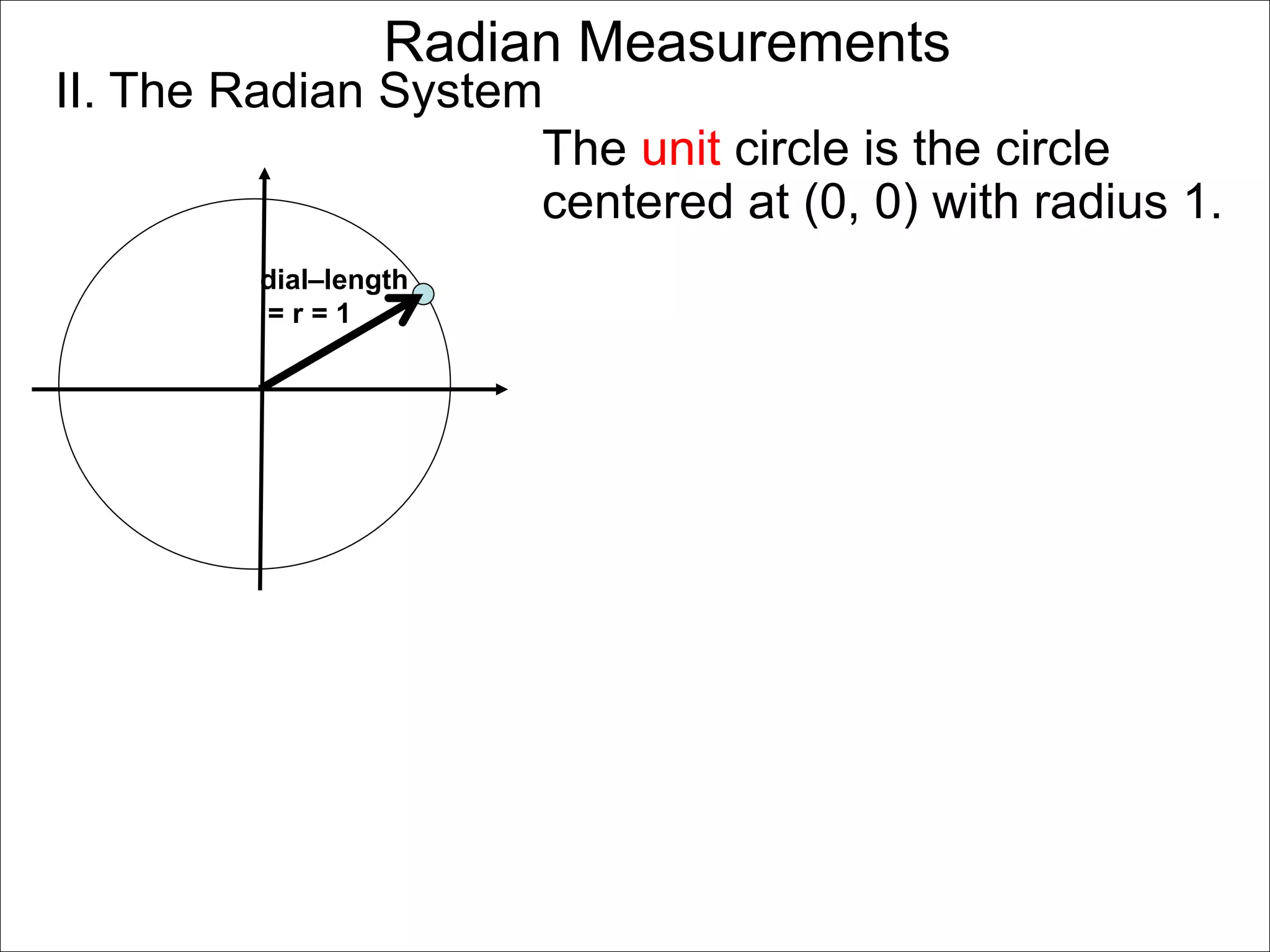
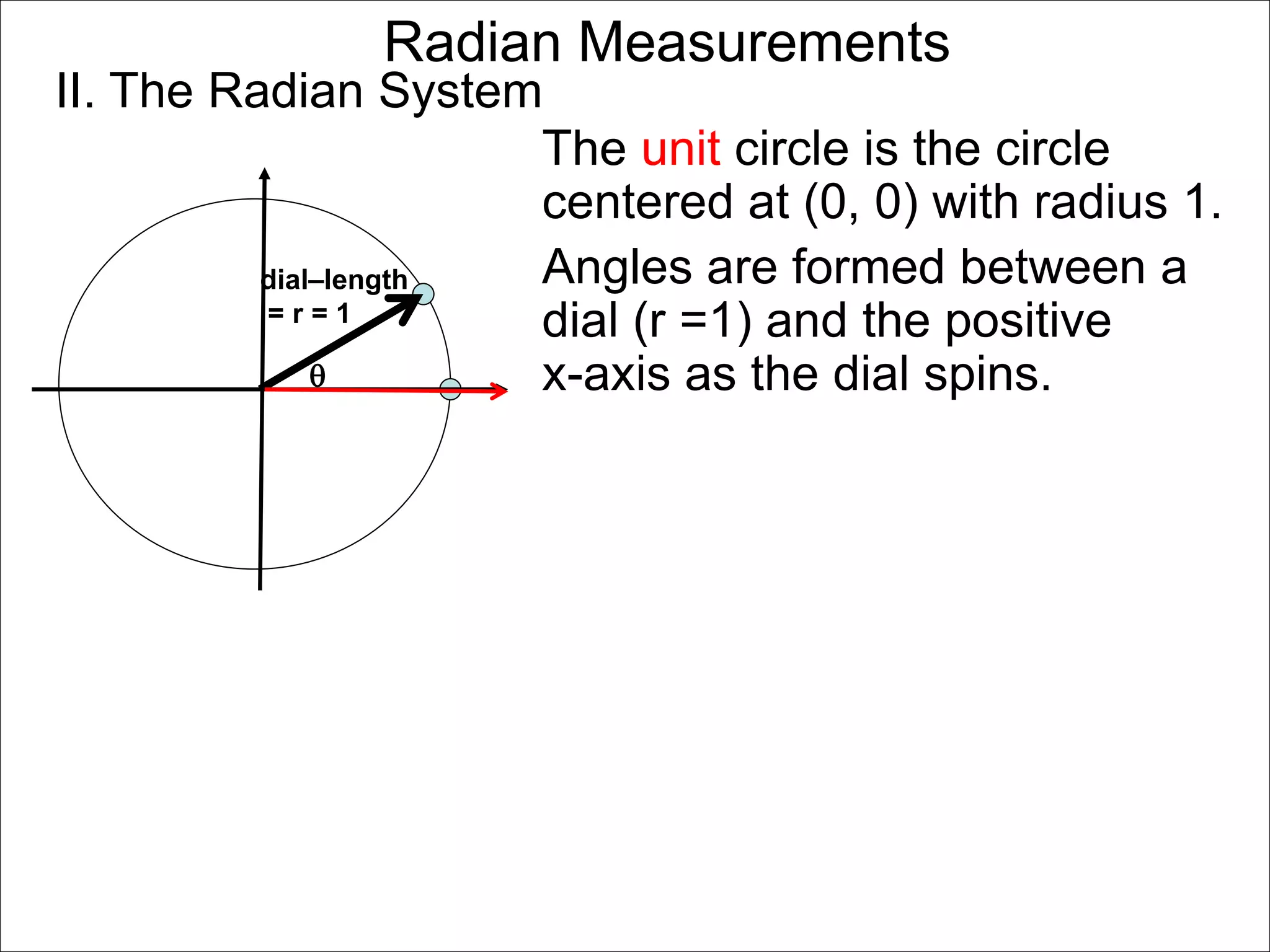
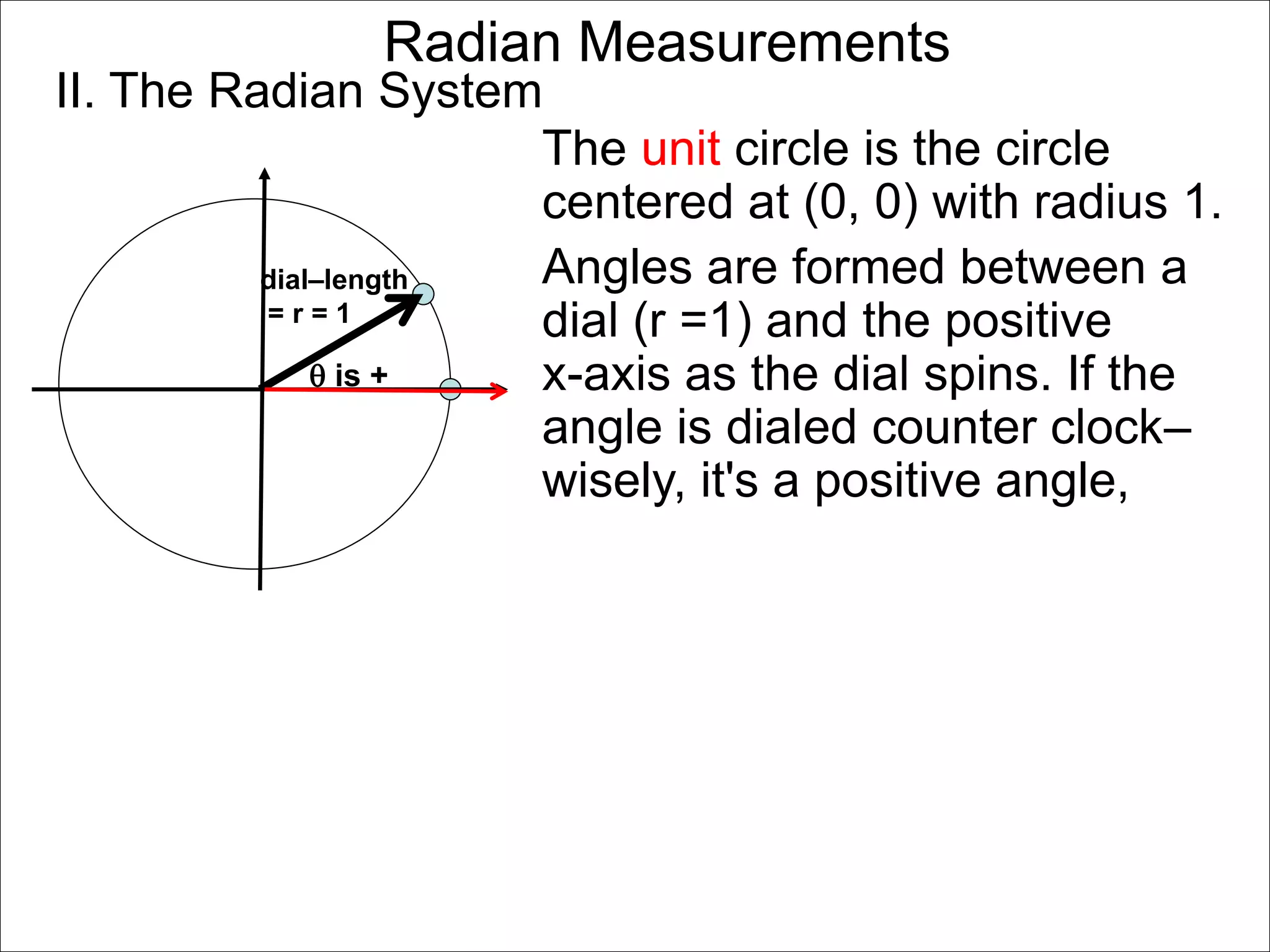
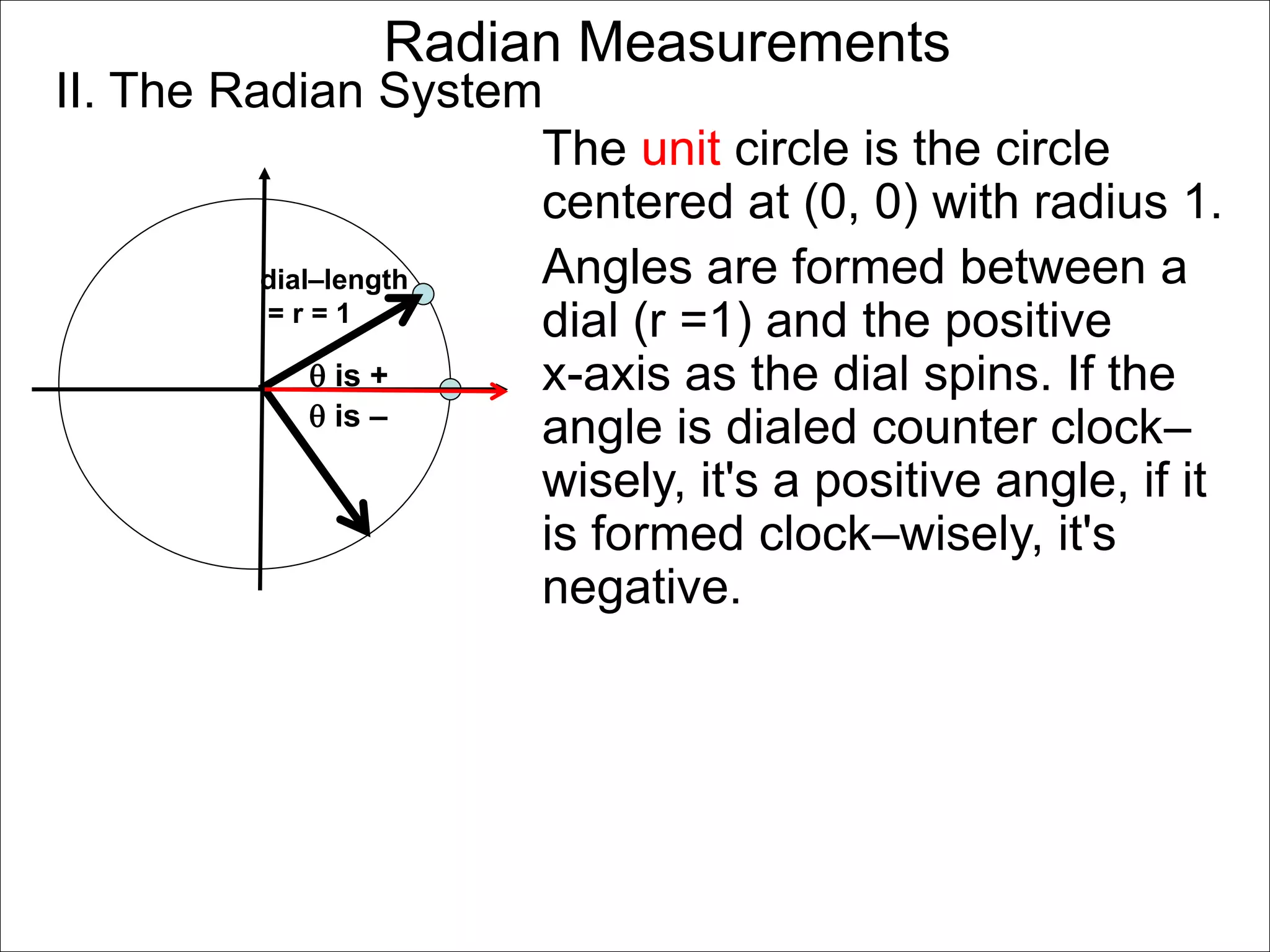
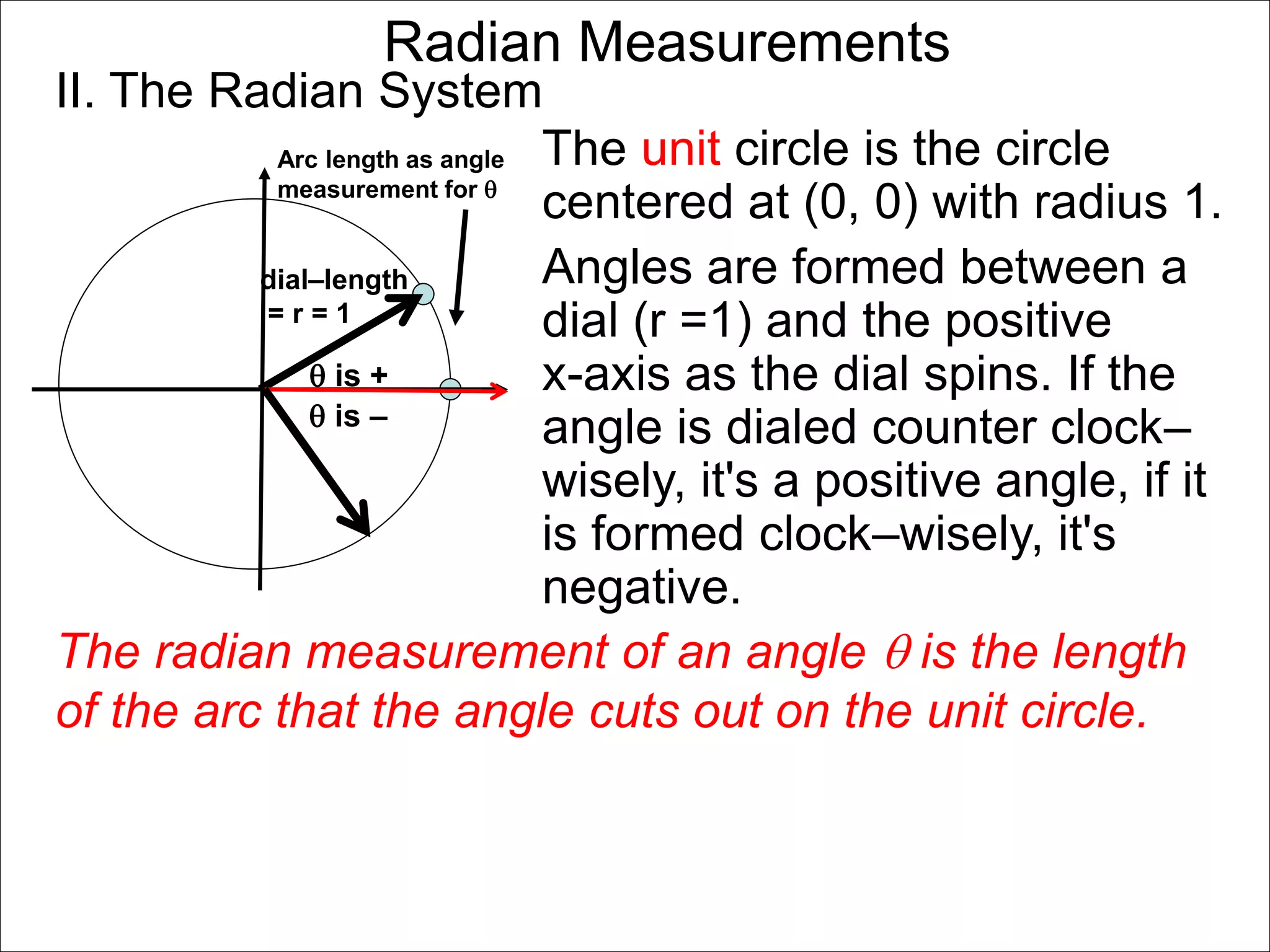
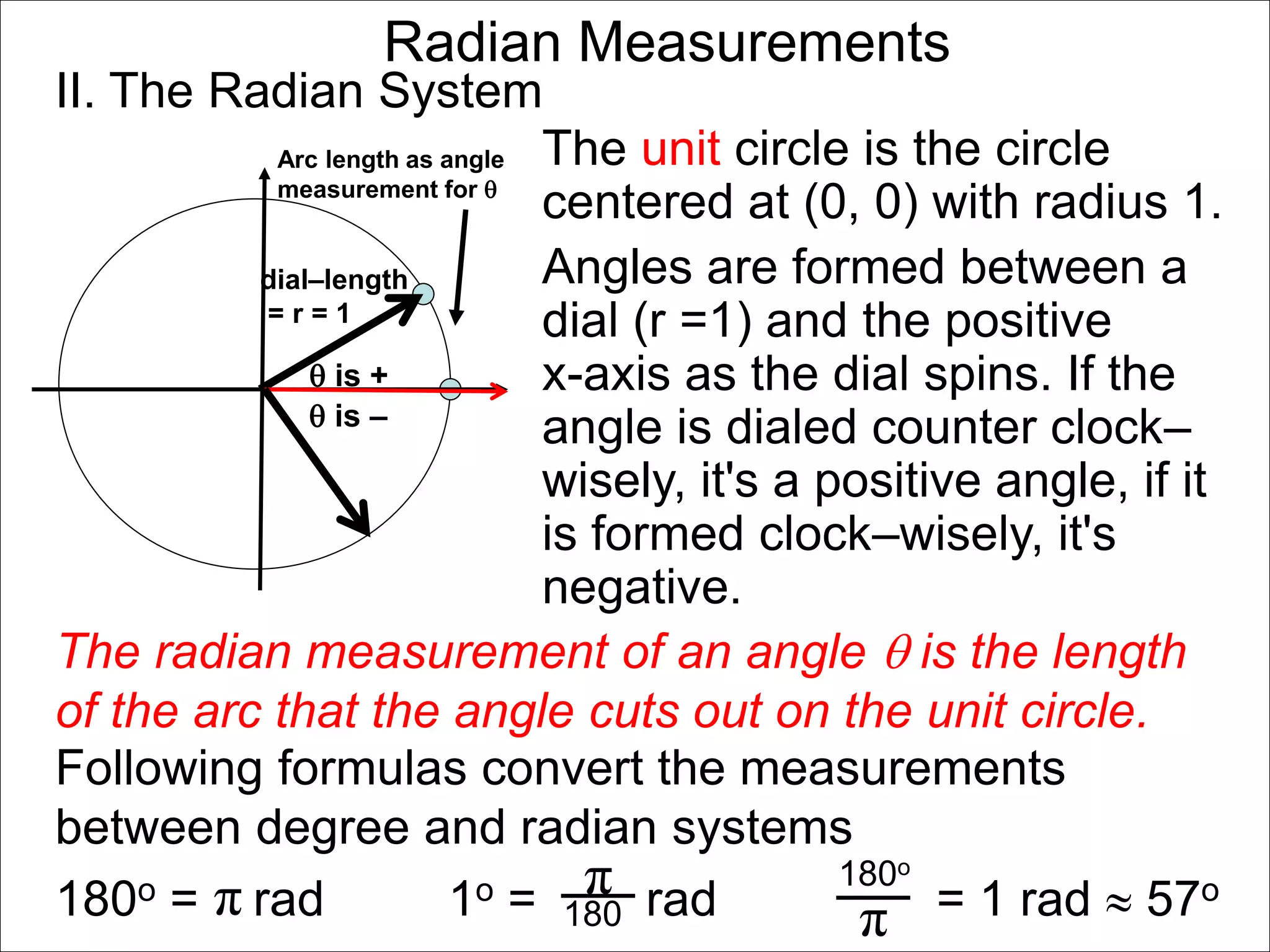
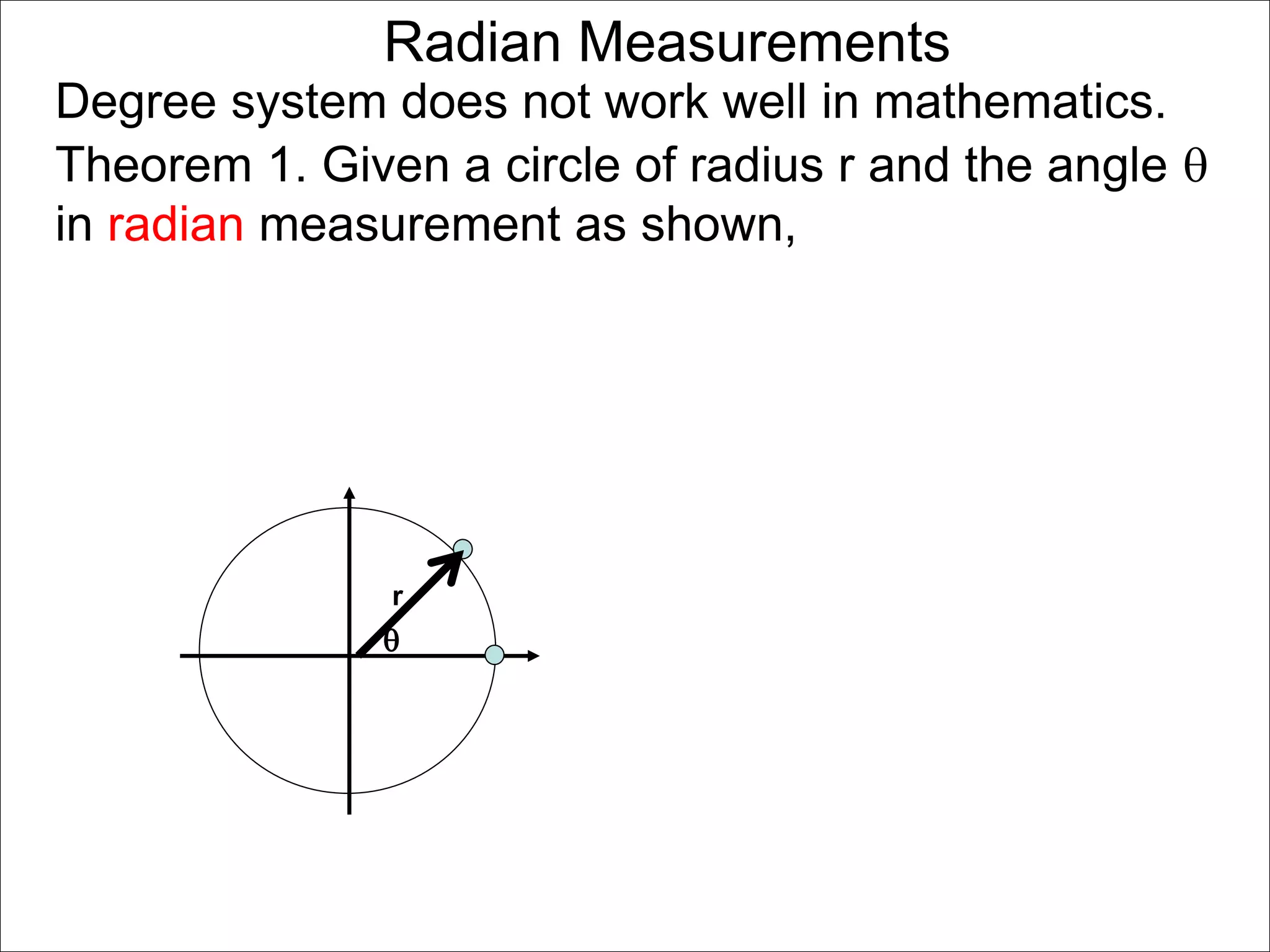
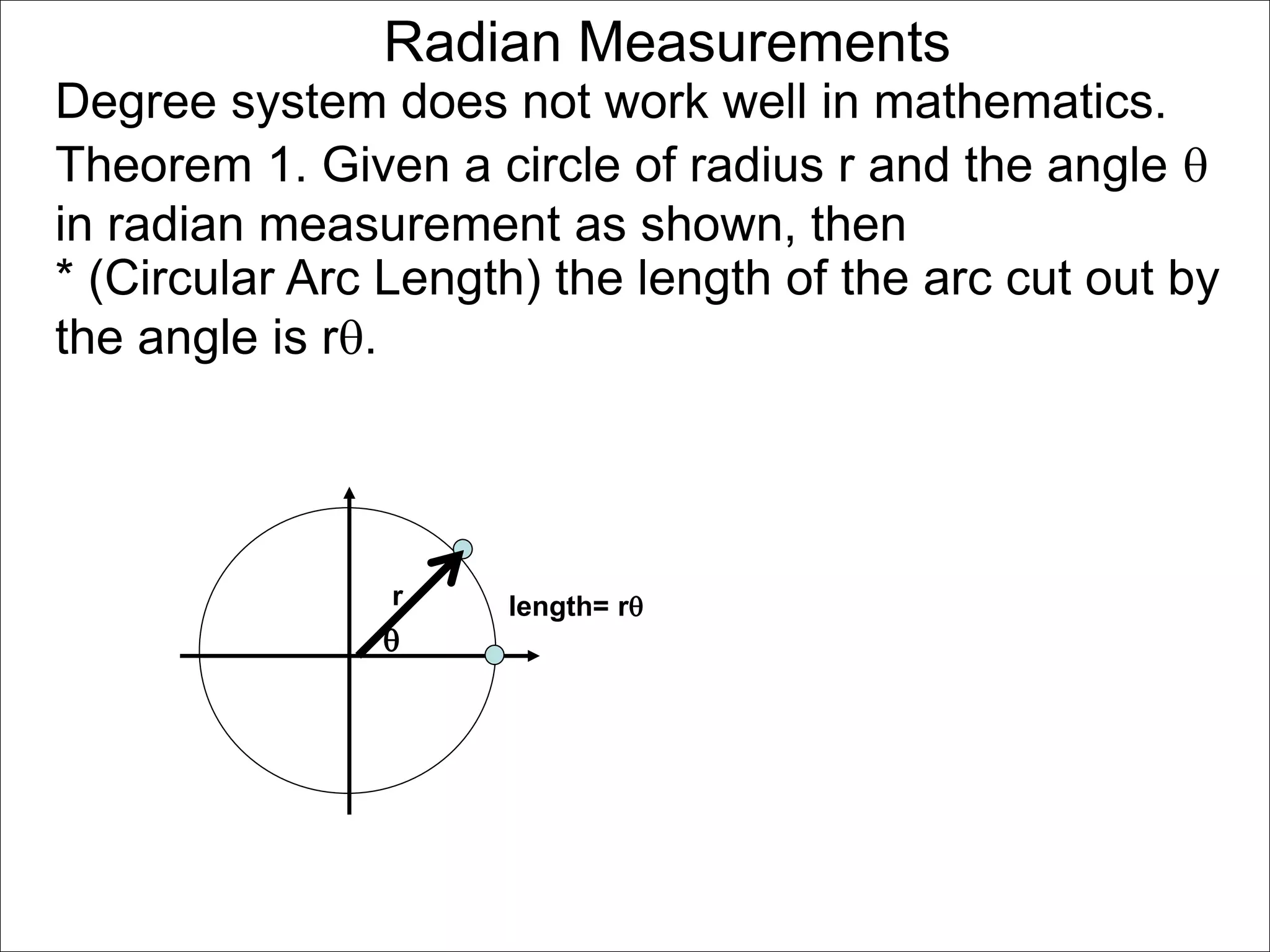
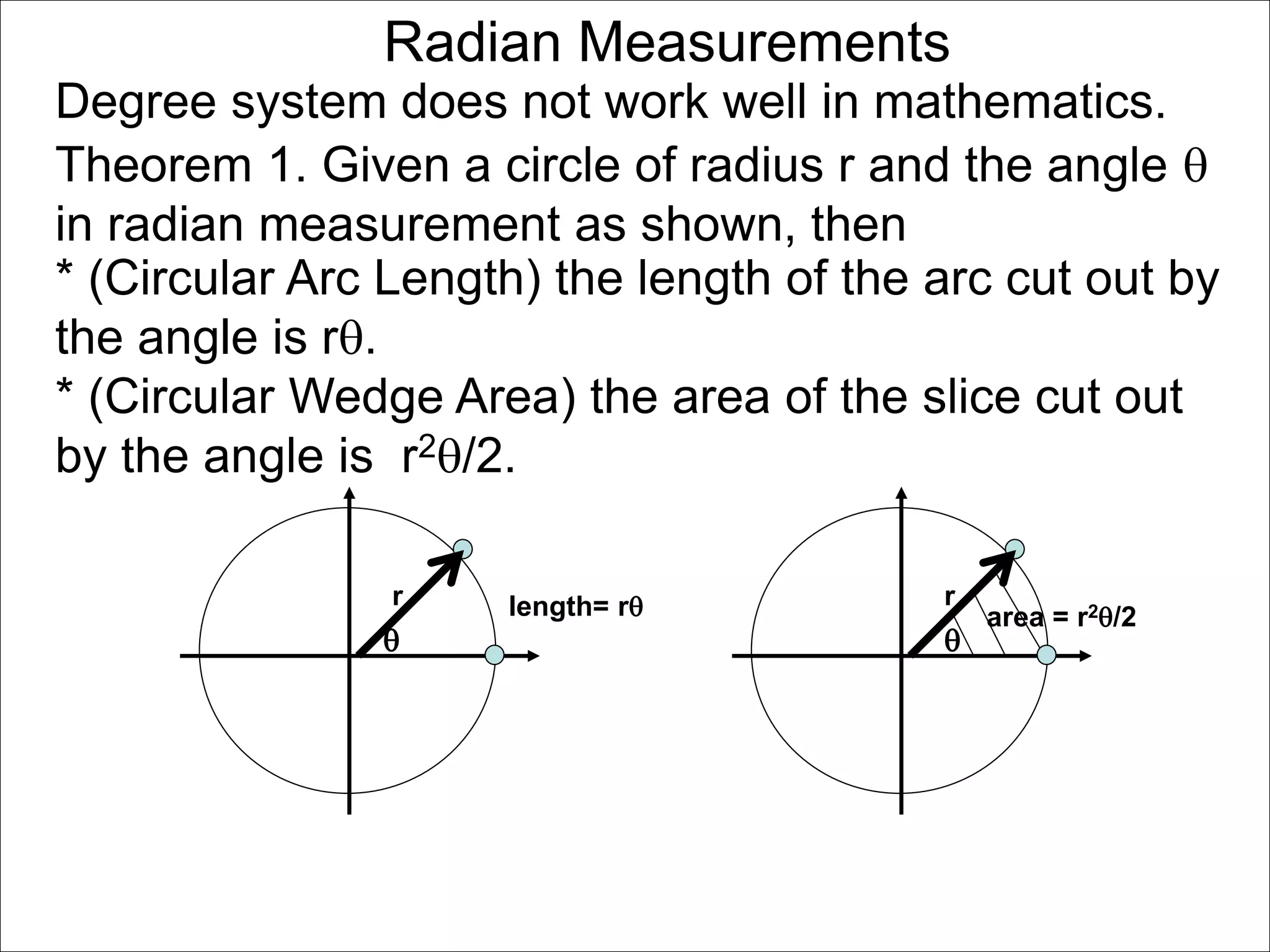
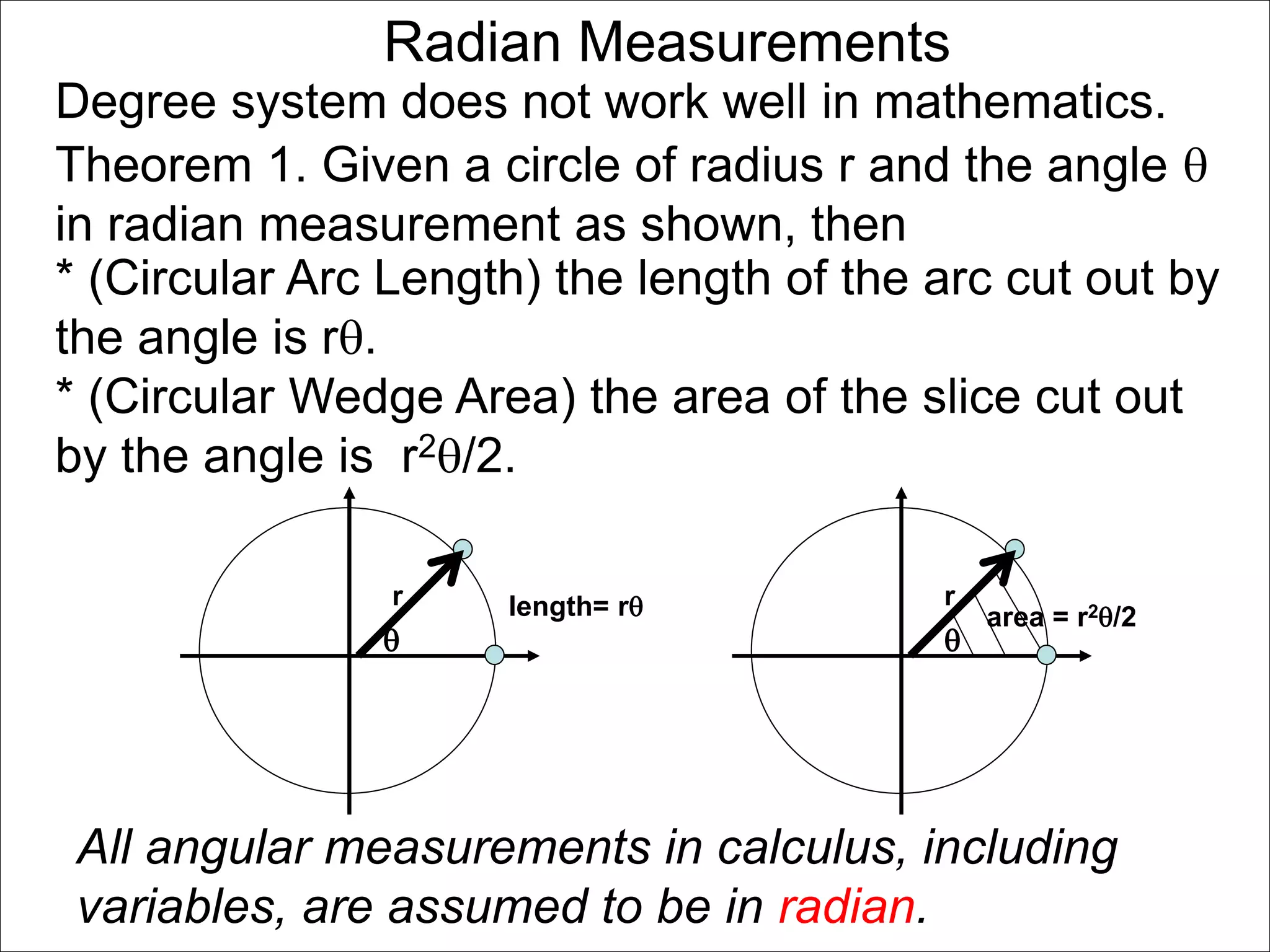
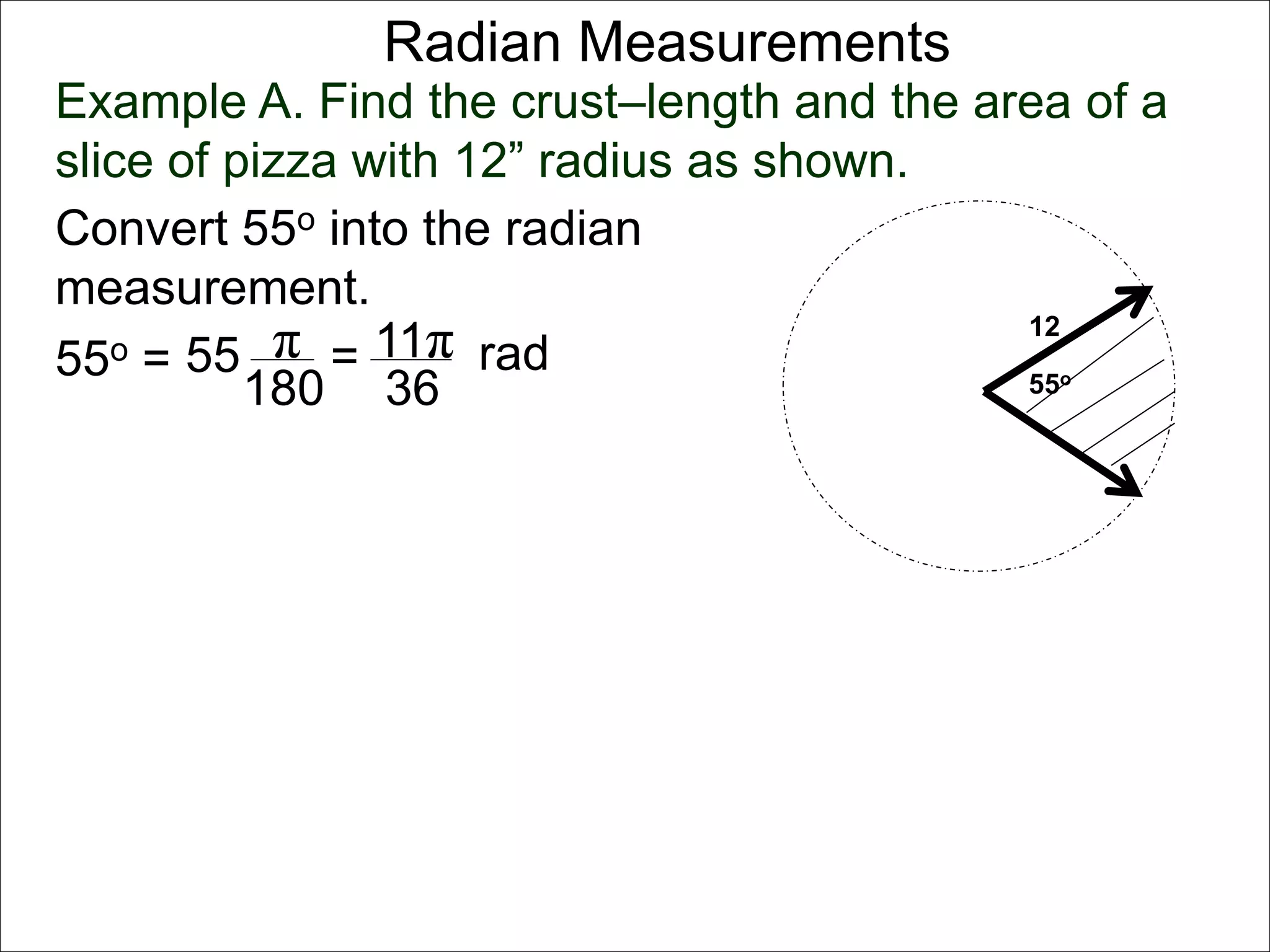
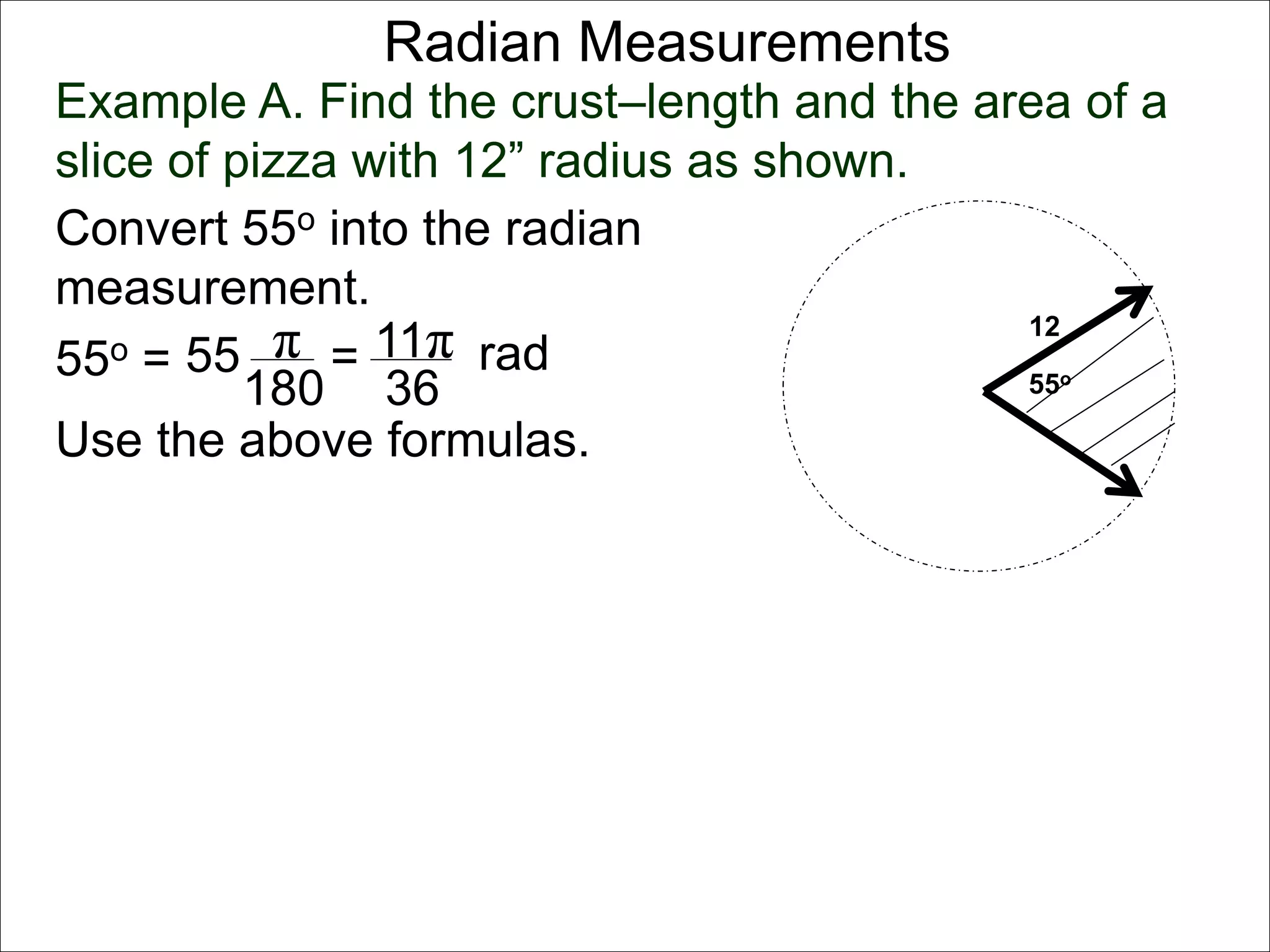
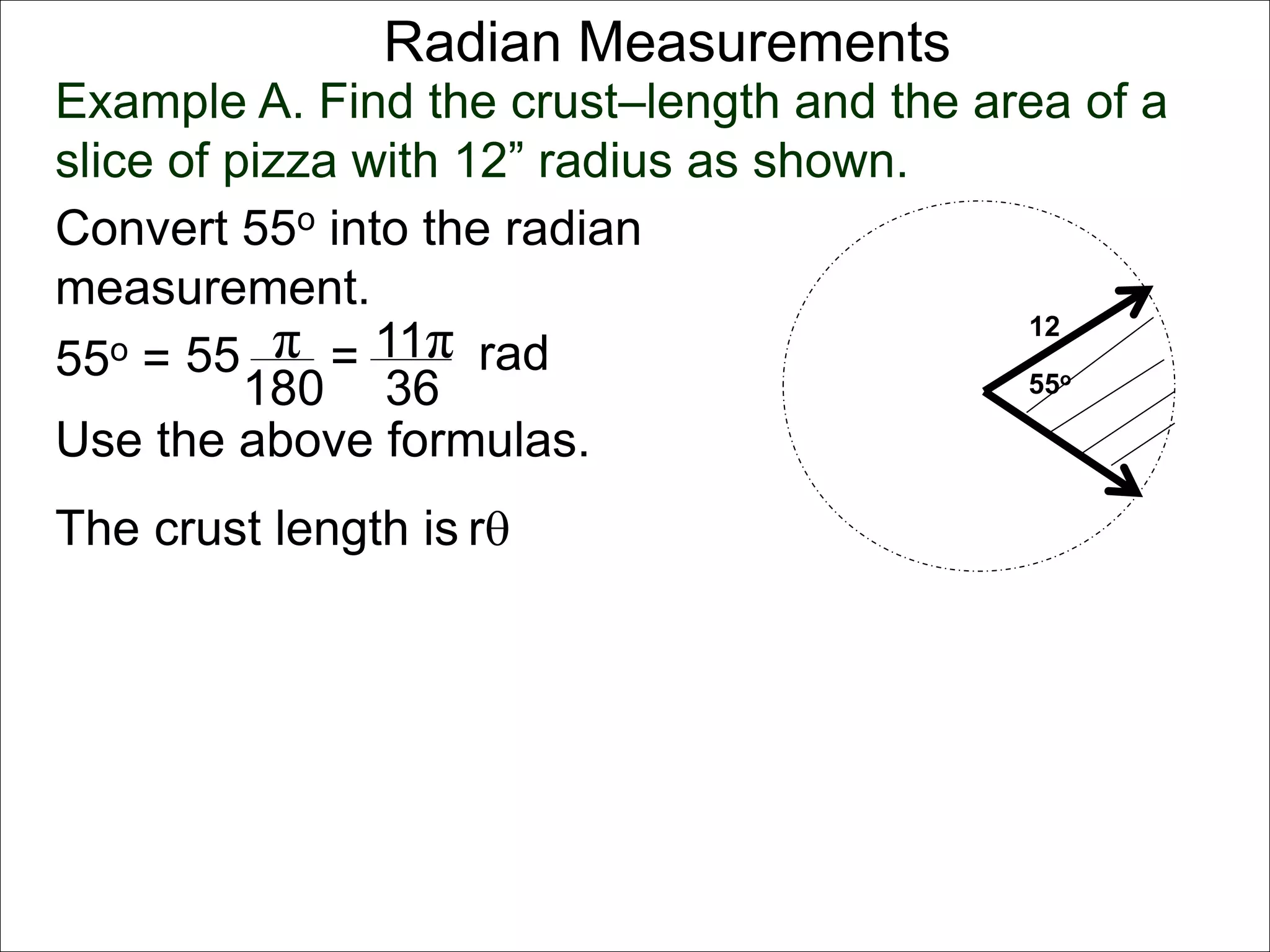
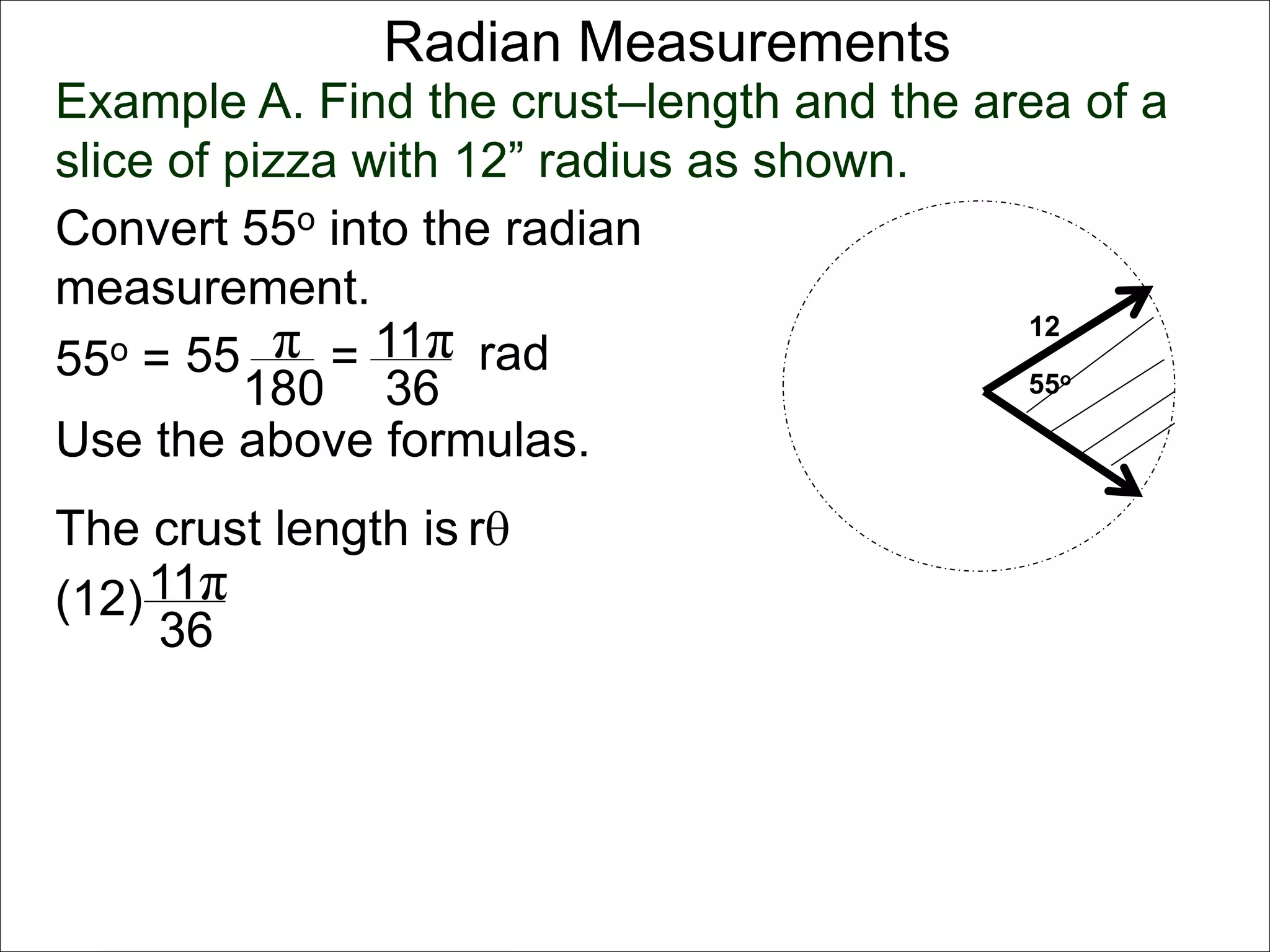
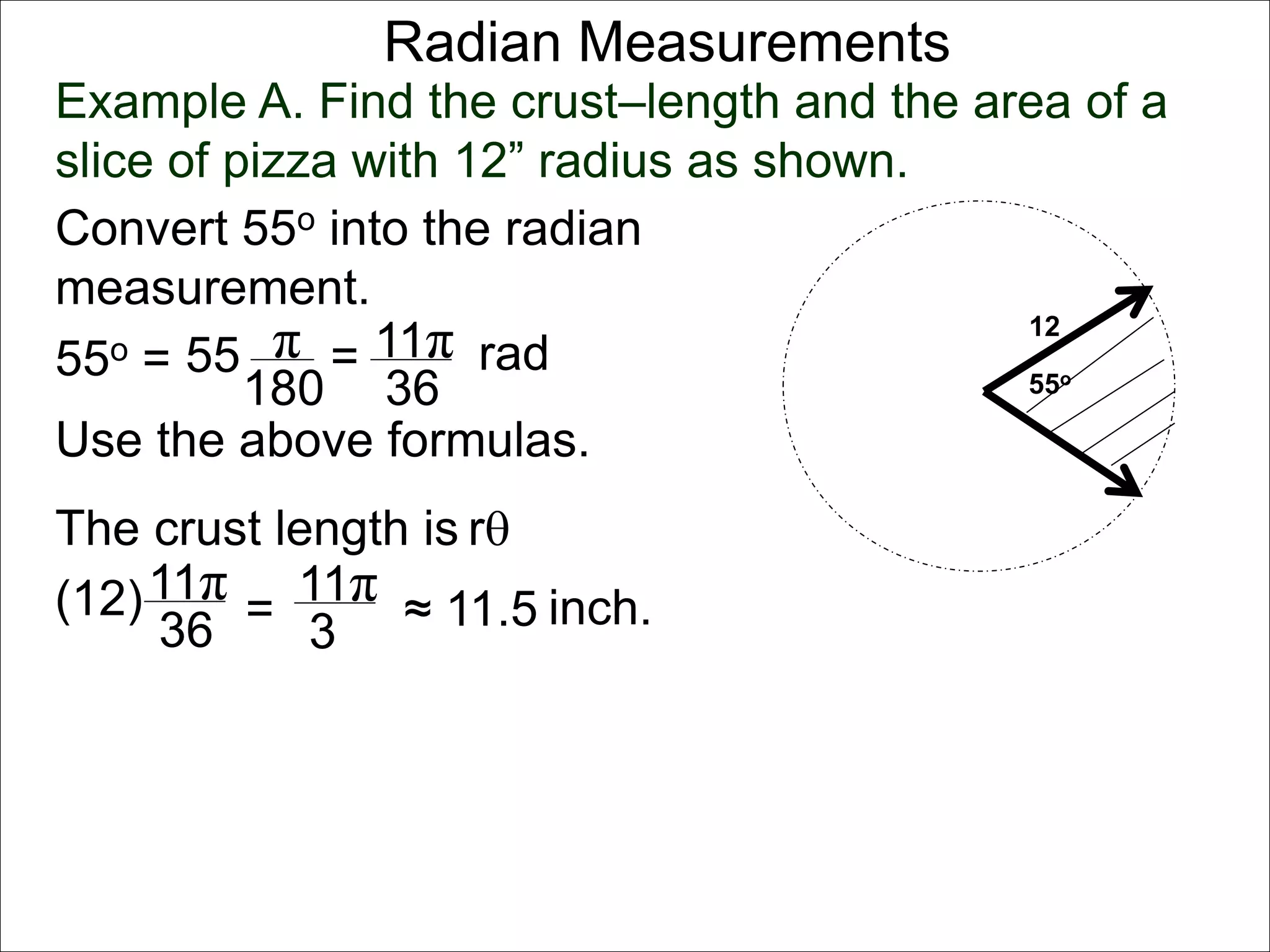
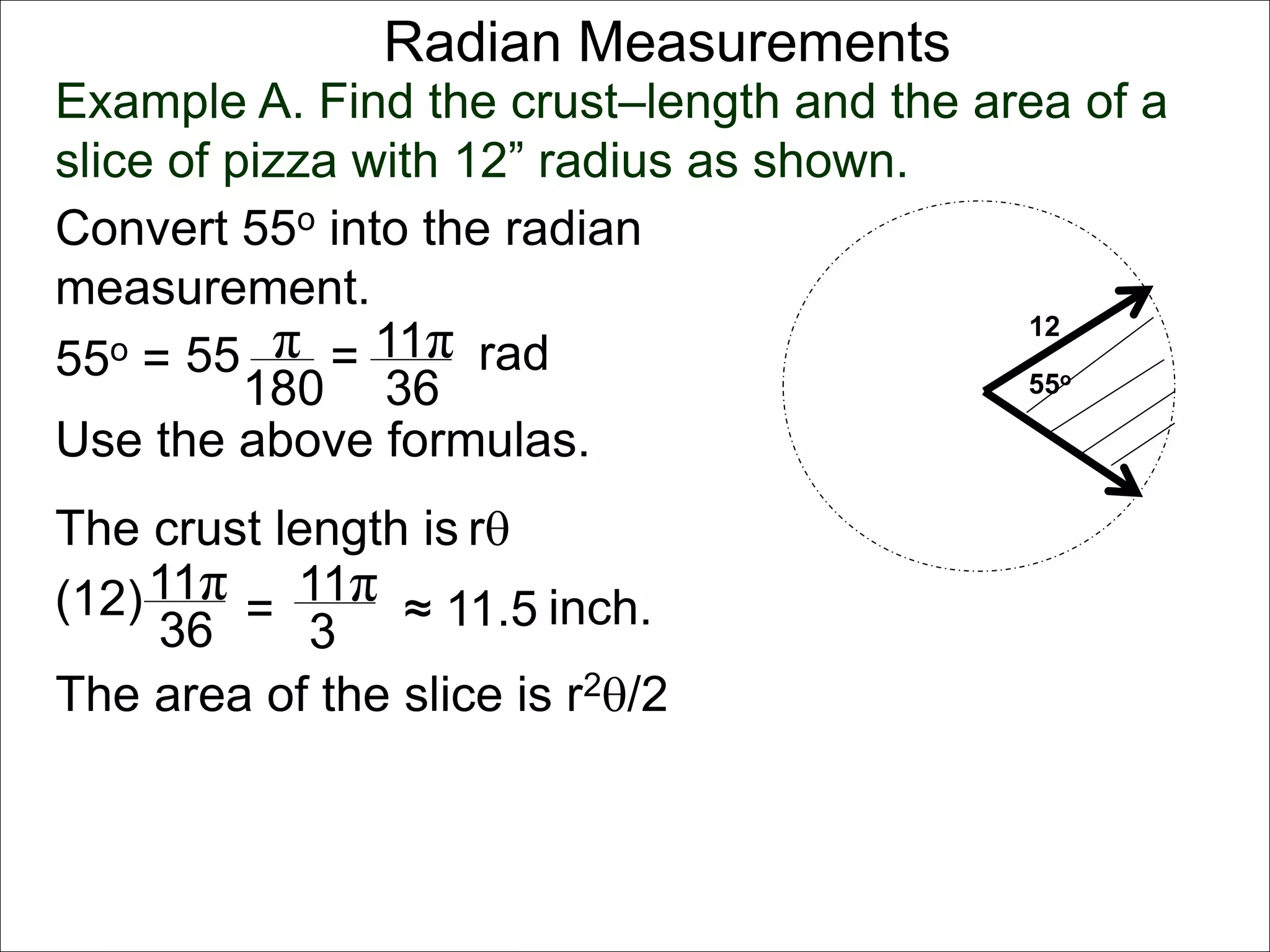
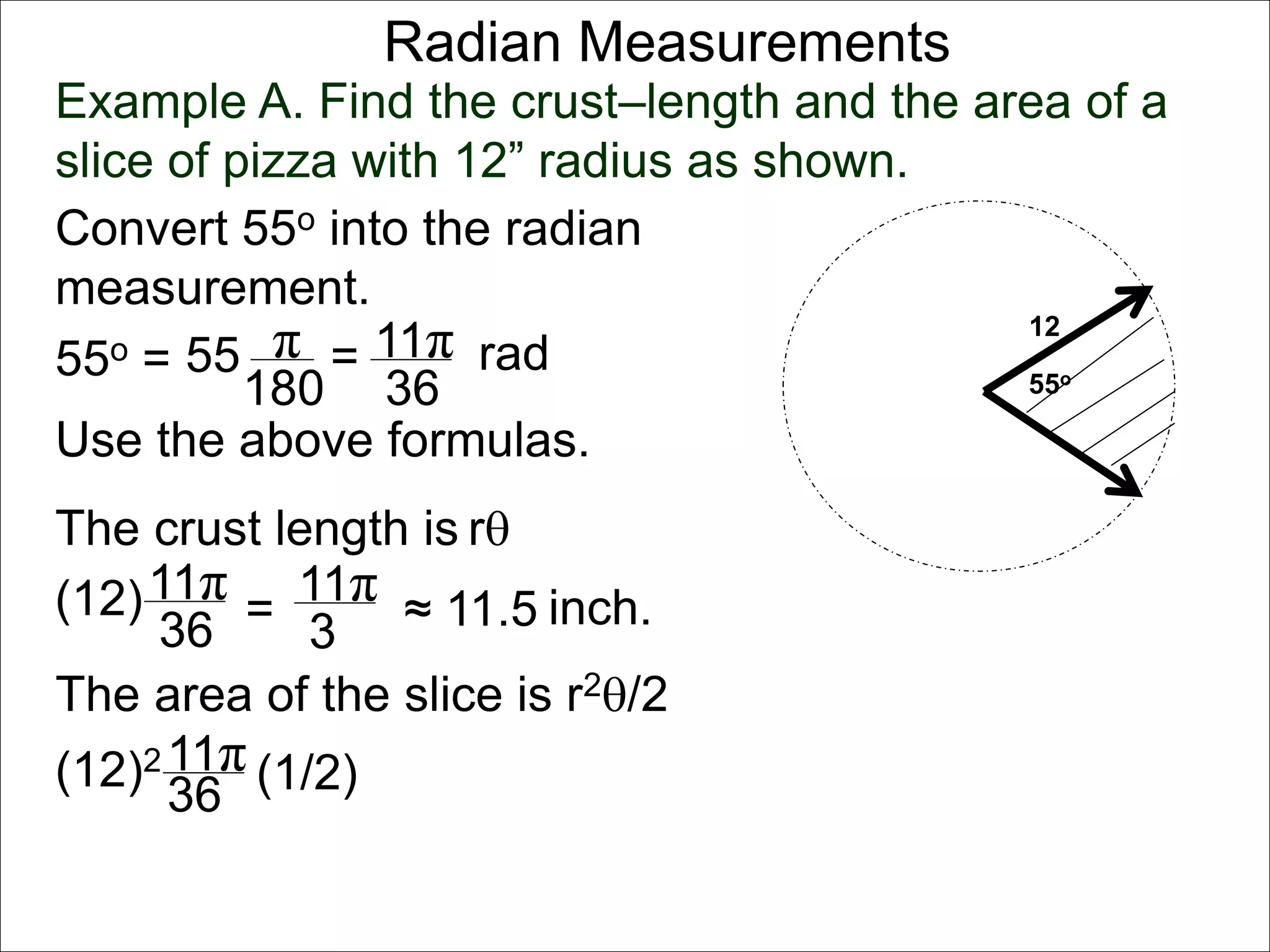
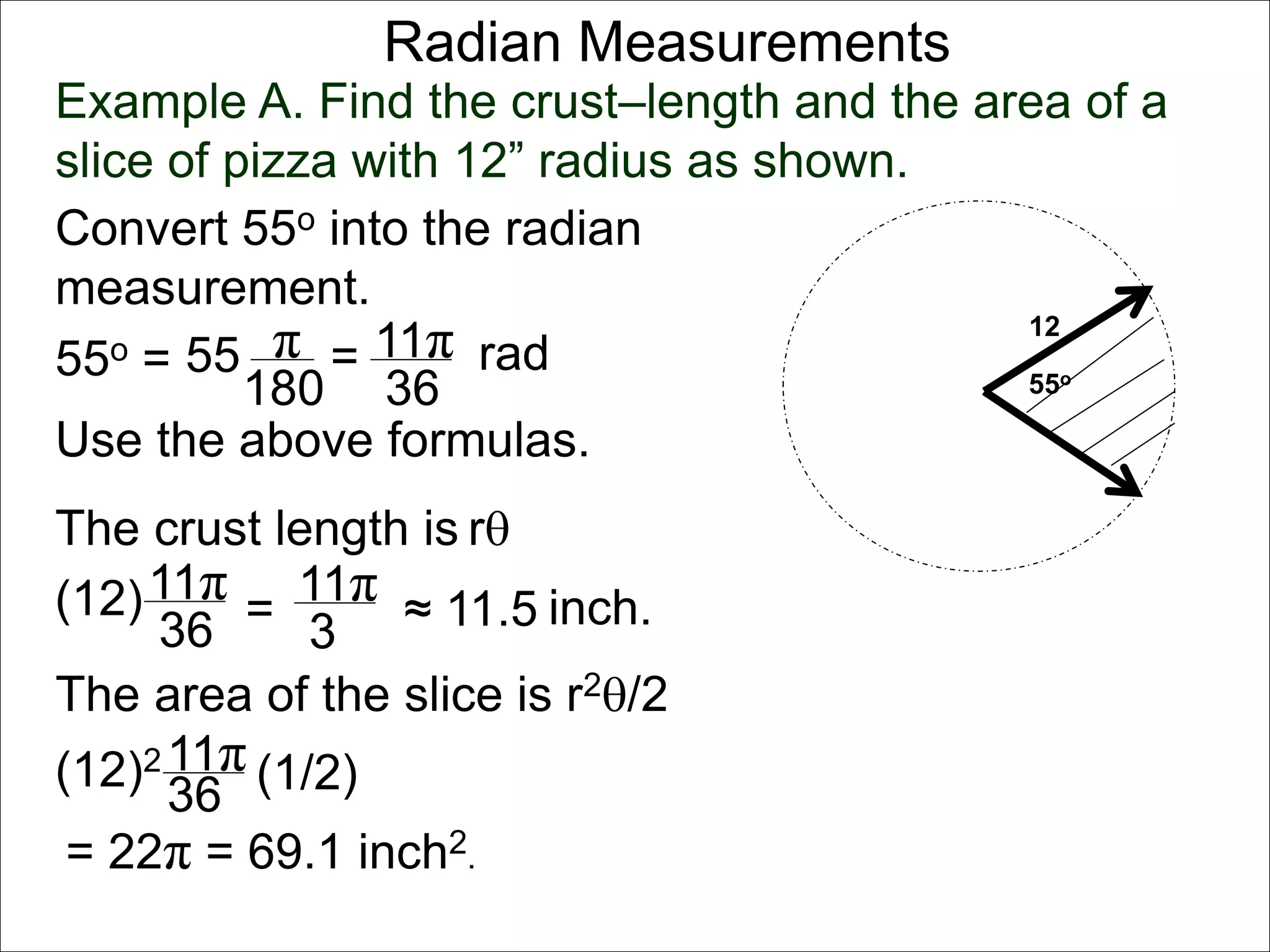
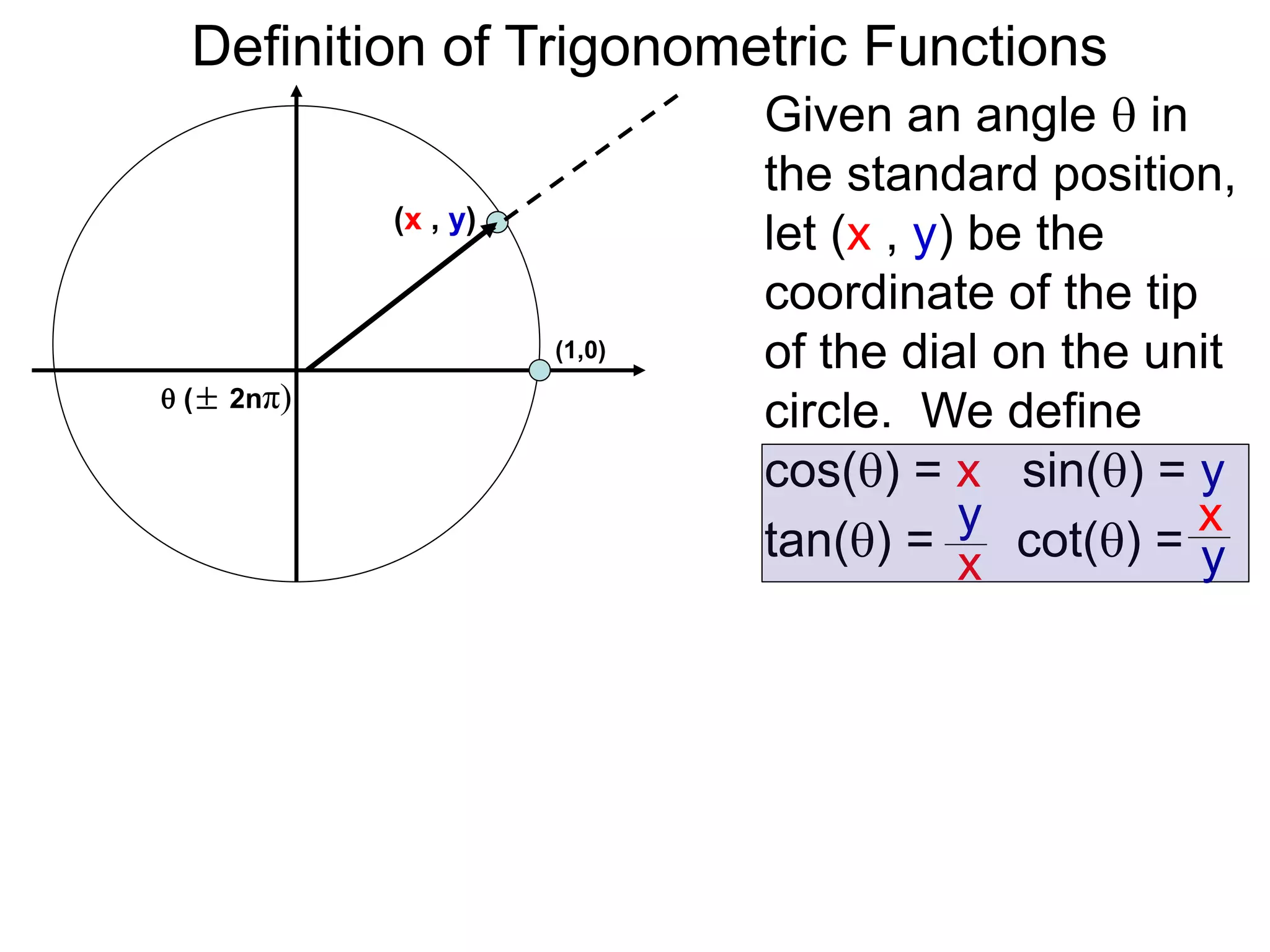
There are two systems for measuring angles: the degree system and the radian system. The degree system divides a full circle into 360 equal angles of 1 degree each. The radian system defines an angle as the arc length cut out by the angle on a unit circle of radius 1, where a full circle corresponds to 2π radians. While the degree system is commonly used, the radian system is preferred in mathematics due to its relationship to circle geometry formulas involving arc lengths and wedge areas.






















































![Math12 lesson201[1]](https://cdn.slidesharecdn.com/ss_thumbnails/math12lesson2011-110719005558-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









