Download as PDF, PPTX









![Images/cinvestav-
Thus, we have that
Two main functions
A function g (x|D) obtained using some algorithm!!!
E [y|x] the optimal regression...
Important
The key factor here is the dependence of the approximation on D.
Why?
The approximation may be very good for a specific training data set but
very bad for another.
This is the reason of studying fusion of information at decision level...
5 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-11-320.jpg)
![Images/cinvestav-
Thus, we have that
Two main functions
A function g (x|D) obtained using some algorithm!!!
E [y|x] the optimal regression...
Important
The key factor here is the dependence of the approximation on D.
Why?
The approximation may be very good for a specific training data set but
very bad for another.
This is the reason of studying fusion of information at decision level...
5 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-12-320.jpg)
![Images/cinvestav-
Thus, we have that
Two main functions
A function g (x|D) obtained using some algorithm!!!
E [y|x] the optimal regression...
Important
The key factor here is the dependence of the approximation on D.
Why?
The approximation may be very good for a specific training data set but
very bad for another.
This is the reason of studying fusion of information at decision level...
5 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-13-320.jpg)
![Images/cinvestav-
Thus, we have that
Two main functions
A function g (x|D) obtained using some algorithm!!!
E [y|x] the optimal regression...
Important
The key factor here is the dependence of the approximation on D.
Why?
The approximation may be very good for a specific training data set but
very bad for another.
This is the reason of studying fusion of information at decision level...
5 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-14-320.jpg)
![Images/cinvestav-
Thus, we have that
Two main functions
A function g (x|D) obtained using some algorithm!!!
E [y|x] the optimal regression...
Important
The key factor here is the dependence of the approximation on D.
Why?
The approximation may be very good for a specific training data set but
very bad for another.
This is the reason of studying fusion of information at decision level...
5 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-15-320.jpg)

![Images/cinvestav-
How do we measure the difference
We have that
Var(X) = E((X − µ)2
)
We can do that for our data
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
Now, if we add and subtract
ED [g (x|D)] (2)
Remark: The expected output of the machine g (x|D)
7 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-17-320.jpg)
![Images/cinvestav-
How do we measure the difference
We have that
Var(X) = E((X − µ)2
)
We can do that for our data
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
Now, if we add and subtract
ED [g (x|D)] (2)
Remark: The expected output of the machine g (x|D)
7 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-18-320.jpg)
![Images/cinvestav-
How do we measure the difference
We have that
Var(X) = E((X − µ)2
)
We can do that for our data
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
Now, if we add and subtract
ED [g (x|D)] (2)
Remark: The expected output of the machine g (x|D)
7 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-19-320.jpg)
![Images/cinvestav-
How do we measure the difference
We have that
Var(X) = E((X − µ)2
)
We can do that for our data
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
Now, if we add and subtract
ED [g (x|D)] (2)
Remark: The expected output of the machine g (x|D)
7 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-20-320.jpg)
![Images/cinvestav-
Thus, we have that
Or Original variance
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)] + ED [g (x|D)] − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
+ ...
...2 ((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x]) + ...
... (ED [g (x|D)] − E [y|x])2
Finally
ED (((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x])) =? (3)
8 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-21-320.jpg)
![Images/cinvestav-
Thus, we have that
Or Original variance
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)] + ED [g (x|D)] − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
+ ...
...2 ((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x]) + ...
... (ED [g (x|D)] − E [y|x])2
Finally
ED (((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x])) =? (3)
8 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-22-320.jpg)
![Images/cinvestav-
Thus, we have that
Or Original variance
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)] + ED [g (x|D)] − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
+ ...
...2 ((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x]) + ...
... (ED [g (x|D)] − E [y|x])2
Finally
ED (((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x])) =? (3)
8 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-23-320.jpg)
![Images/cinvestav-
Thus, we have that
Or Original variance
VarD (g (x|D)) = ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)] + ED [g (x|D)] − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
+ ...
...2 ((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x]) + ...
... (ED [g (x|D)] − E [y|x])2
Finally
ED (((g (x|D) − ED [g (x|D)])) (ED [g (x|D)] − E [y|x])) =? (3)
8 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-24-320.jpg)

![Images/cinvestav-
We have the Bias-Variance
Our Final Equation
ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
VARIANCE
+ (ED [g (x|D)] − E [y|x])2
BIAS
Where the variance
It represents the measure of the error between our machine g (x|D) and
the expected output of the machine under xi ∼ p (x|Θ).
Where the bias
It represents the quadratic error between the expected output of the
machine under xi ∼ p (x|Θ) and the expected output of the optimal
regression.
10 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-26-320.jpg)
![Images/cinvestav-
We have the Bias-Variance
Our Final Equation
ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
VARIANCE
+ (ED [g (x|D)] − E [y|x])2
BIAS
Where the variance
It represents the measure of the error between our machine g (x|D) and
the expected output of the machine under xi ∼ p (x|Θ).
Where the bias
It represents the quadratic error between the expected output of the
machine under xi ∼ p (x|Θ) and the expected output of the optimal
regression.
10 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-27-320.jpg)
![Images/cinvestav-
We have the Bias-Variance
Our Final Equation
ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
VARIANCE
+ (ED [g (x|D)] − E [y|x])2
BIAS
Where the variance
It represents the measure of the error between our machine g (x|D) and
the expected output of the machine under xi ∼ p (x|Θ).
Where the bias
It represents the quadratic error between the expected output of the
machine under xi ∼ p (x|Θ) and the expected output of the optimal
regression.
10 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-28-320.jpg)
![Images/cinvestav-
We have the Bias-Variance
Our Final Equation
ED (g (x|D) − E [y|x])2
= ED (g (x|D) − ED [g (x|D)])2
VARIANCE
+ (ED [g (x|D)] − E [y|x])2
BIAS
Where the variance
It represents the measure of the error between our machine g (x|D) and
the expected output of the machine under xi ∼ p (x|Θ).
Where the bias
It represents the quadratic error between the expected output of the
machine under xi ∼ p (x|Θ) and the expected output of the optimal
regression.
10 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-29-320.jpg)










![Images/cinvestav-
For this
Assume
The data is generated by the following function
y =f (x) + ,
∼N 0, σ2
We know that
The optimum regressor is E [y|x] = f (x)
Furthermore
Assume that the randomness in the different training sets, D, is due to the
yi’s (Affected by noise), while the respective points, xi, are fixed.
14 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-41-320.jpg)
![Images/cinvestav-
For this
Assume
The data is generated by the following function
y =f (x) + ,
∼N 0, σ2
We know that
The optimum regressor is E [y|x] = f (x)
Furthermore
Assume that the randomness in the different training sets, D, is due to the
yi’s (Affected by noise), while the respective points, xi, are fixed.
14 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-42-320.jpg)
![Images/cinvestav-
For this
Assume
The data is generated by the following function
y =f (x) + ,
∼N 0, σ2
We know that
The optimum regressor is E [y|x] = f (x)
Furthermore
Assume that the randomness in the different training sets, D, is due to the
yi’s (Affected by noise), while the respective points, xi, are fixed.
14 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-43-320.jpg)

![Images/cinvestav-
Sampling the Space
Imagine that D ⊂ [x1, x2] in which x lies
For example, you can choose xi = x1 + x2−x1
N−1 (i − 1) with i = 1, 2, ..., N
16 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-45-320.jpg)


![Images/cinvestav-
Case 1
Since g (x) is fixed
ED [g (x|D)] = g (x|D) ≡ g (x) (4)
With
VarD [g (x|D)] = 0 (5)
On the other hand
Because g (x) was chosen arbitrarily the expected bias must be large.
(ED [g (x|D)] − E [y|x])2
BIAS
(6)
18 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-48-320.jpg)
![Images/cinvestav-
Case 1
Since g (x) is fixed
ED [g (x|D)] = g (x|D) ≡ g (x) (4)
With
VarD [g (x|D)] = 0 (5)
On the other hand
Because g (x) was chosen arbitrarily the expected bias must be large.
(ED [g (x|D)] − E [y|x])2
BIAS
(6)
18 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-49-320.jpg)
![Images/cinvestav-
Case 1
Since g (x) is fixed
ED [g (x|D)] = g (x|D) ≡ g (x) (4)
With
VarD [g (x|D)] = 0 (5)
On the other hand
Because g (x) was chosen arbitrarily the expected bias must be large.
(ED [g (x|D)] − E [y|x])2
BIAS
(6)
18 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-50-320.jpg)


![Images/cinvestav-
Case 2
Due to the zero mean of the noise source
ED [g1 (x|D)] = f (x) = E [y|x] for any x = xi (7)
Remark: At the training points the bias is zero.
However the variance increases
ED (g1 (x|D) − ED [g1 (x|D)])2
= ED (f (x) + − f (x))2
= σ2
, for x = xi, i = 1, 2, ..., N
In other words
The bias becomes zero (or approximately zero) but the variance is now
equal to the variance of the noise source.
20 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-53-320.jpg)
![Images/cinvestav-
Case 2
Due to the zero mean of the noise source
ED [g1 (x|D)] = f (x) = E [y|x] for any x = xi (7)
Remark: At the training points the bias is zero.
However the variance increases
ED (g1 (x|D) − ED [g1 (x|D)])2
= ED (f (x) + − f (x))2
= σ2
, for x = xi, i = 1, 2, ..., N
In other words
The bias becomes zero (or approximately zero) but the variance is now
equal to the variance of the noise source.
20 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-54-320.jpg)
![Images/cinvestav-
Case 2
Due to the zero mean of the noise source
ED [g1 (x|D)] = f (x) = E [y|x] for any x = xi (7)
Remark: At the training points the bias is zero.
However the variance increases
ED (g1 (x|D) − ED [g1 (x|D)])2
= ED (f (x) + − f (x))2
= σ2
, for x = xi, i = 1, 2, ..., N
In other words
The bias becomes zero (or approximately zero) but the variance is now
equal to the variance of the noise source.
20 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-55-320.jpg)




![Images/cinvestav-
Introduction
Something Notable
In evaluating the performance of a classification system, the probability of
error is sometimes not the only quantity that assesses its performance
sufficiently.
For this assume a M-class classification task
An important issue is to know whether there are classes that exhibit a
higher tendency for confusion.
Where the confusion matrix
Confusion Matrix A = [Aij] is defined such that each element Aij is the
number of data points whose true class was i but where classified in class
j.
23 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-60-320.jpg)
![Images/cinvestav-
Introduction
Something Notable
In evaluating the performance of a classification system, the probability of
error is sometimes not the only quantity that assesses its performance
sufficiently.
For this assume a M-class classification task
An important issue is to know whether there are classes that exhibit a
higher tendency for confusion.
Where the confusion matrix
Confusion Matrix A = [Aij] is defined such that each element Aij is the
number of data points whose true class was i but where classified in class
j.
23 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-61-320.jpg)
![Images/cinvestav-
Introduction
Something Notable
In evaluating the performance of a classification system, the probability of
error is sometimes not the only quantity that assesses its performance
sufficiently.
For this assume a M-class classification task
An important issue is to know whether there are classes that exhibit a
higher tendency for confusion.
Where the confusion matrix
Confusion Matrix A = [Aij] is defined such that each element Aij is the
number of data points whose true class was i but where classified in class
j.
23 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-62-320.jpg)







![Images/cinvestav-
What we want
We want to measure
A quality measure to measure different classifiers (for different parameter
values).
We call that as
R(f ) = ED [L (y, f (x))] . (11)
Example: L (y, f (x)) = y − f (x) 2
2
More precisely
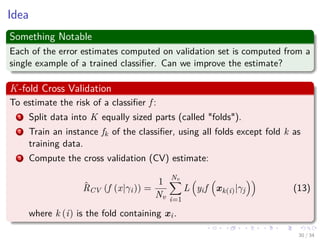
For different values γj of the parameter, we train a classifier f (x|γj) on
the training set.
28 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-71-320.jpg)
![Images/cinvestav-
What we want
We want to measure
A quality measure to measure different classifiers (for different parameter
values).
We call that as
R(f ) = ED [L (y, f (x))] . (11)
Example: L (y, f (x)) = y − f (x) 2
2
More precisely
For different values γj of the parameter, we train a classifier f (x|γj) on
the training set.
28 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-72-320.jpg)
![Images/cinvestav-
What we want
We want to measure
A quality measure to measure different classifiers (for different parameter
values).
We call that as
R(f ) = ED [L (y, f (x))] . (11)
Example: L (y, f (x)) = y − f (x) 2
2
More precisely
For different values γj of the parameter, we train a classifier f (x|γj) on
the training set.
28 / 34](https://image.slidesharecdn.com/06-151212035935/85/11-Machine-Learning-Important-Issues-in-Machine-Learning-73-320.jpg)




















This document discusses important issues in machine learning for data mining, including the bias-variance dilemma. It explains that the difference between the optimal regression and a learned model can be measured by looking at bias and variance. Bias measures the error between the expected output of the learned model and the optimal regression, while variance measures the error between the learned model's output and its expected output. There is a tradeoff between bias and variance - increasing one decreases the other. This is known as the bias-variance dilemma. Cross-validation and confusion matrices are also introduced as evaluation techniques.




























































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)

