Downloaded 143 times

![Digital Image Fundamentals: 13
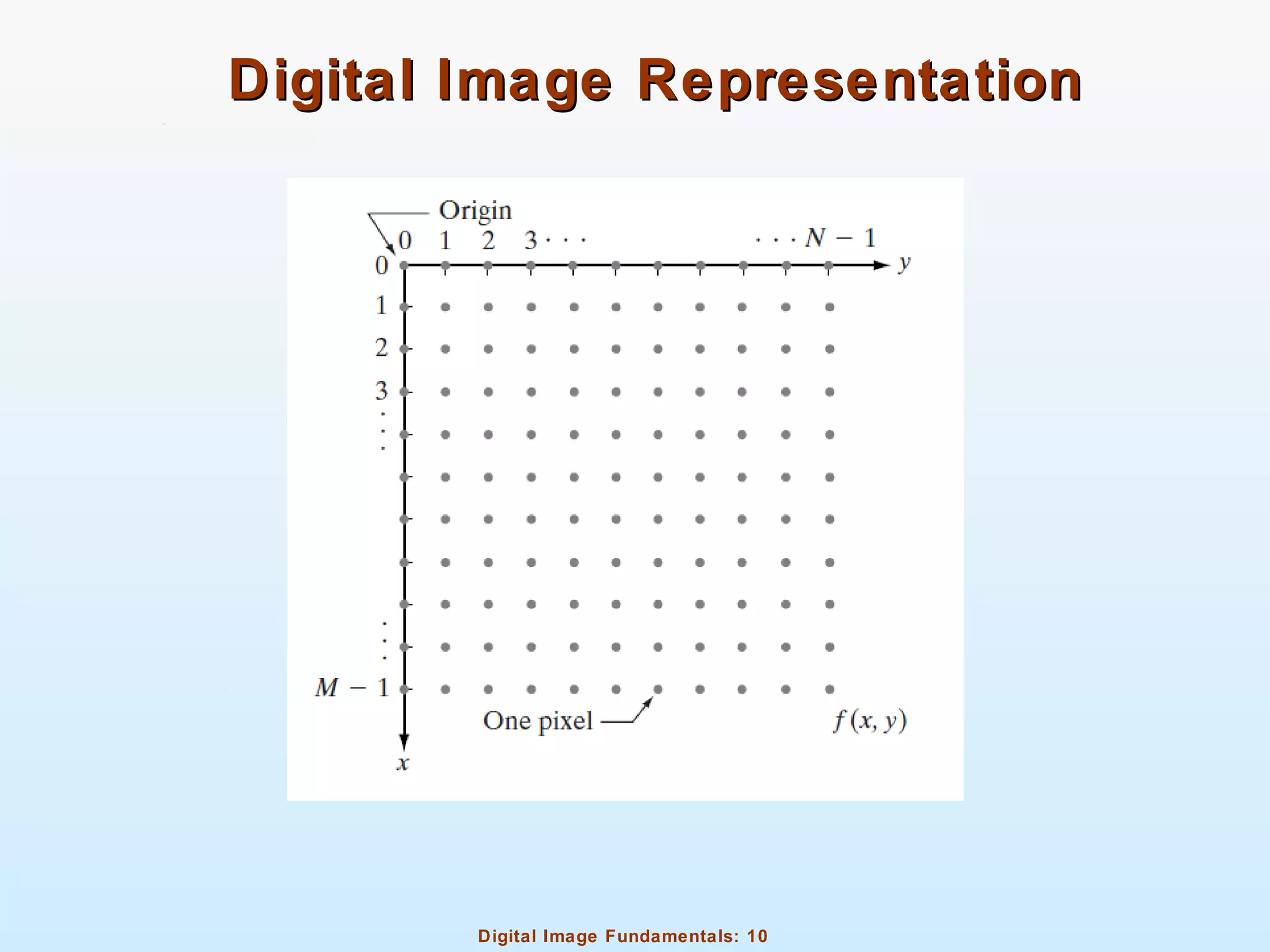
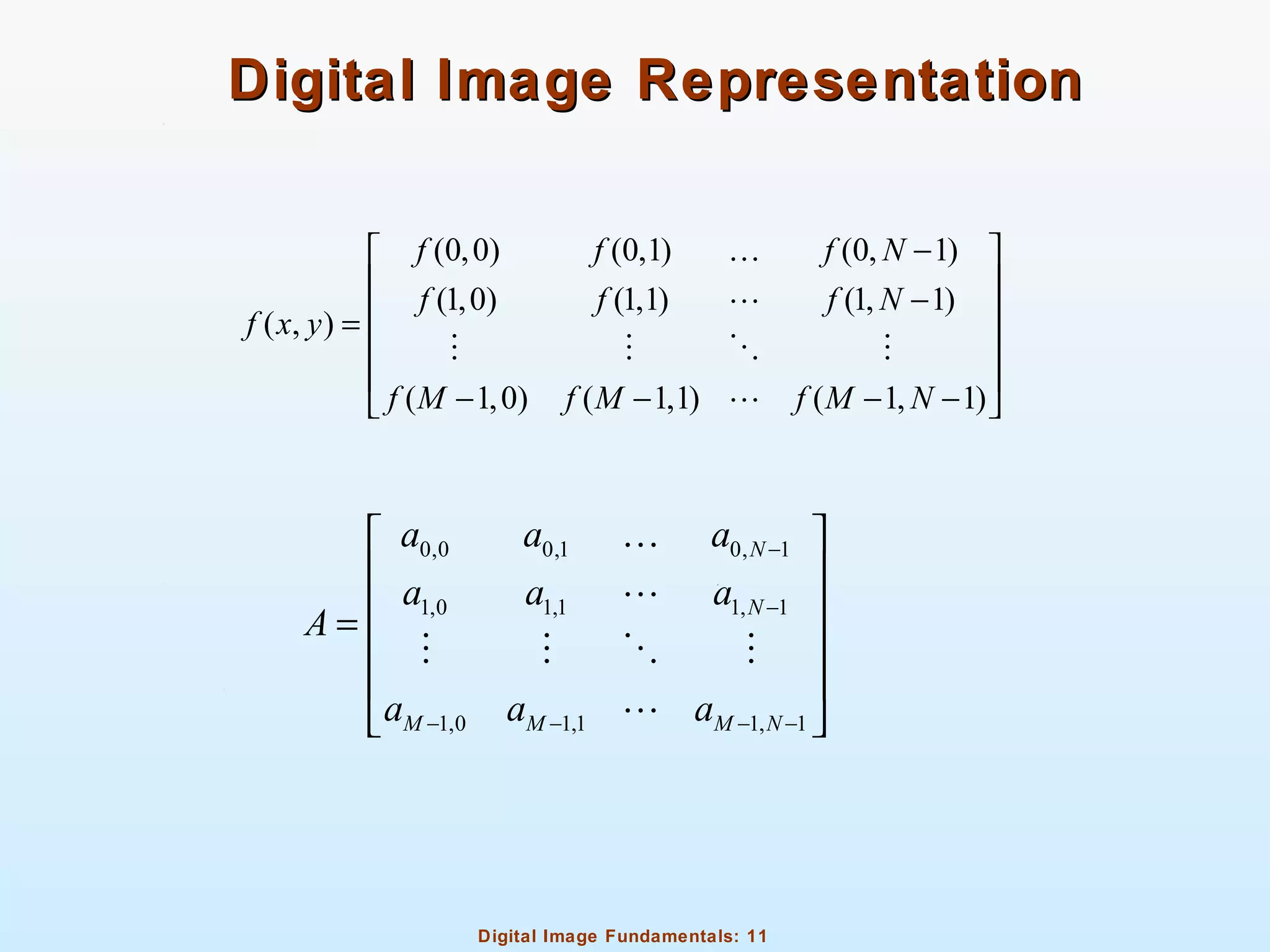
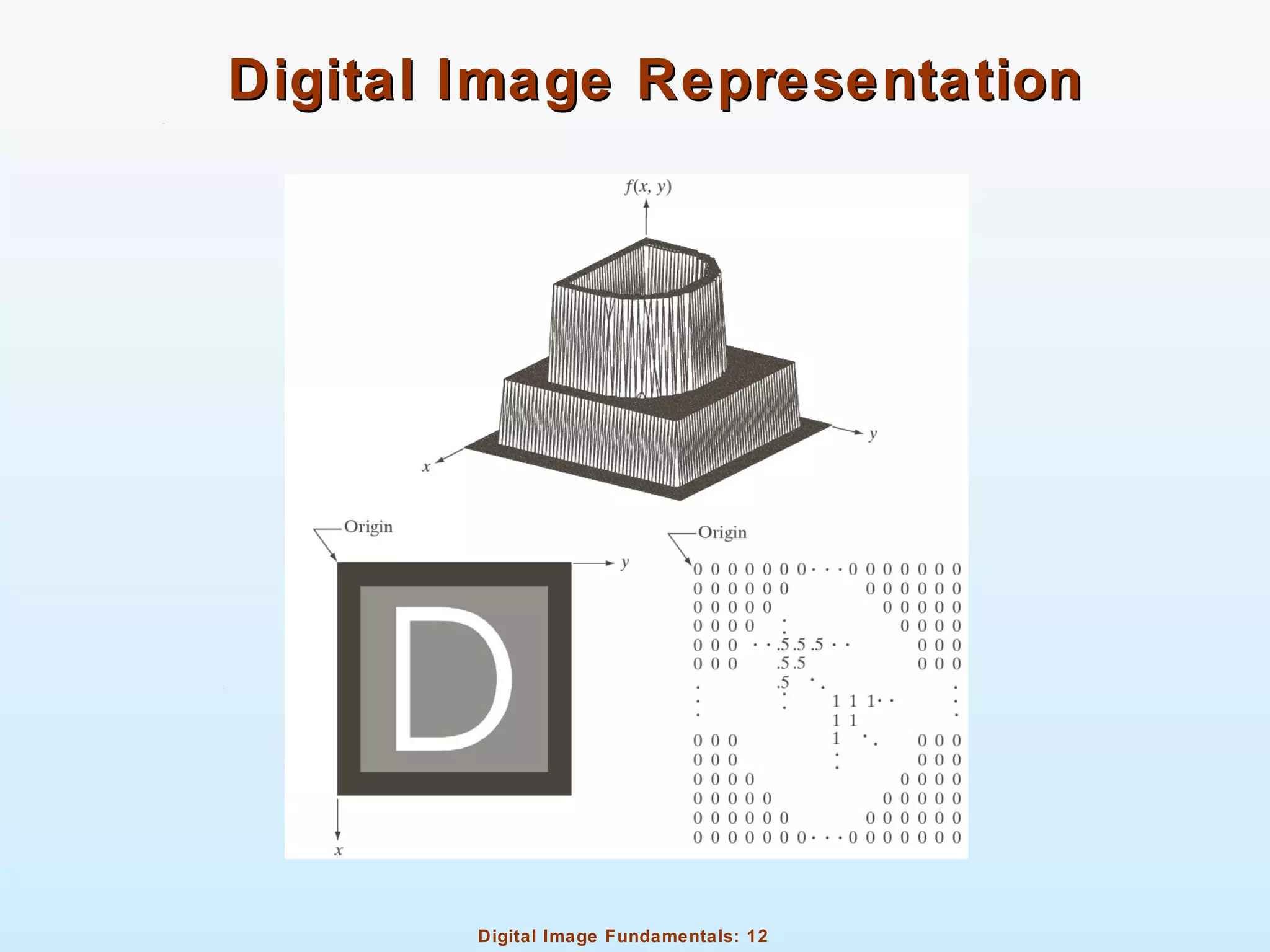
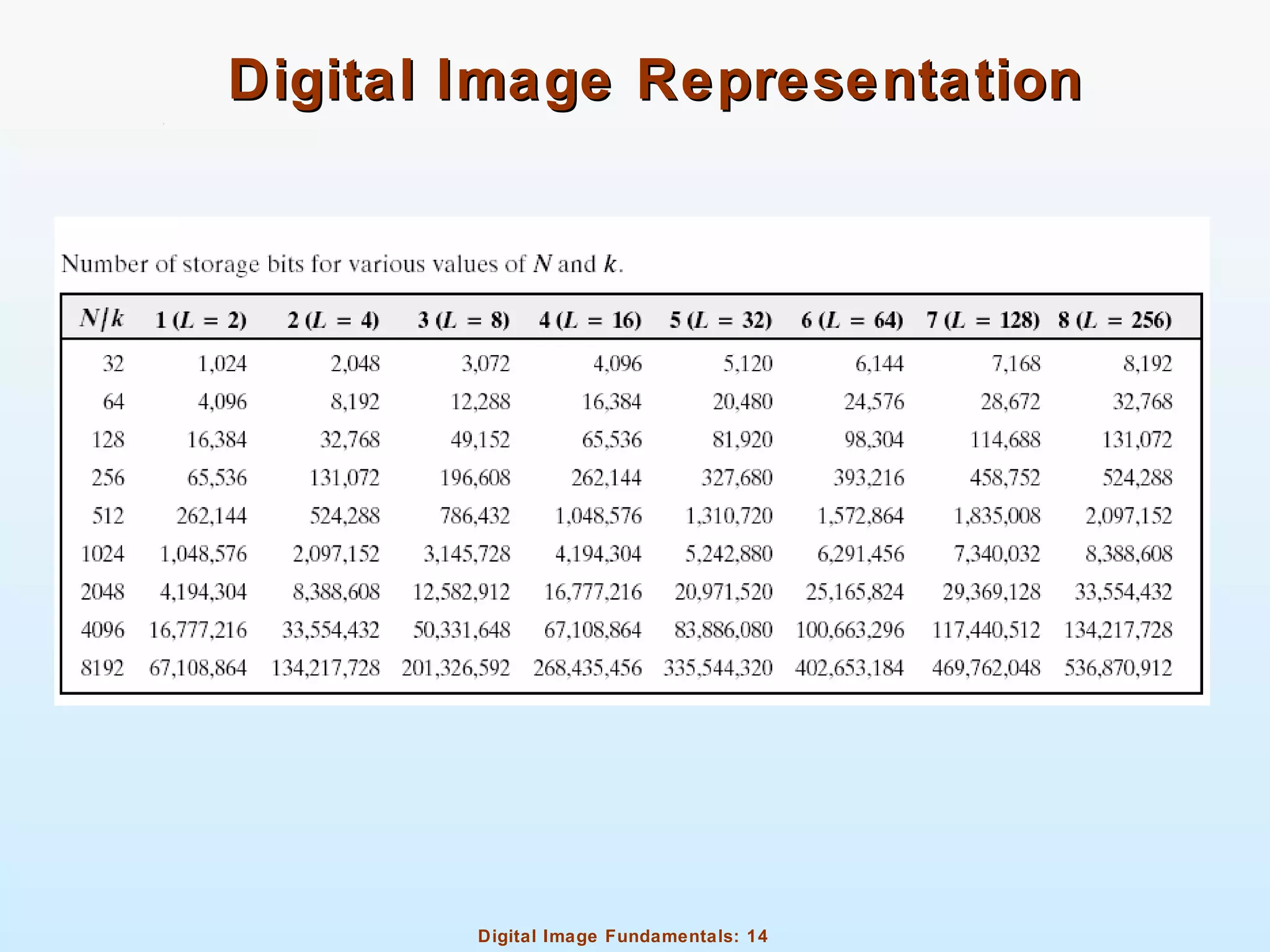
Digital Image RepresentationDigital Image Representation
M – number of rows
N – number of columns
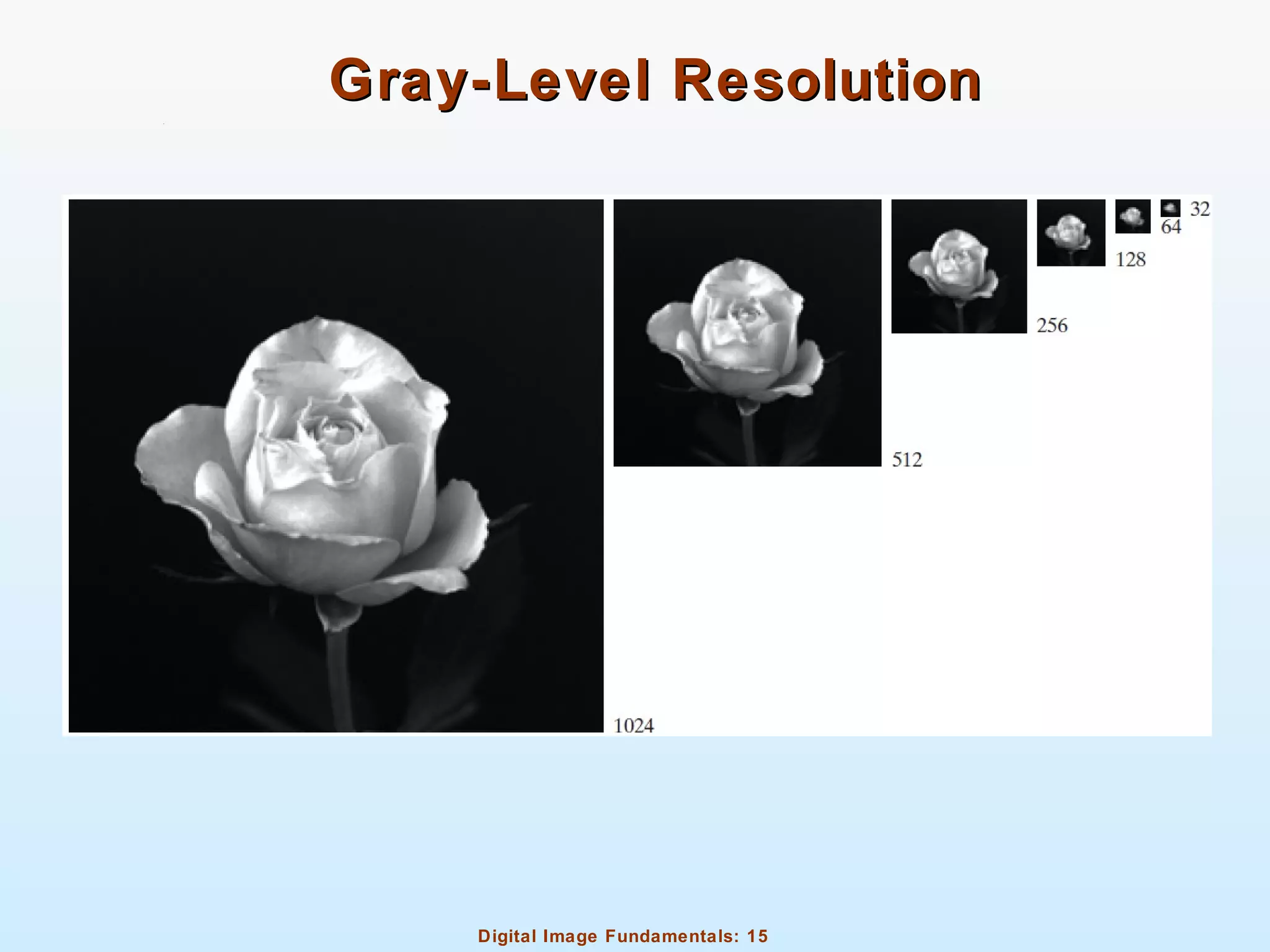
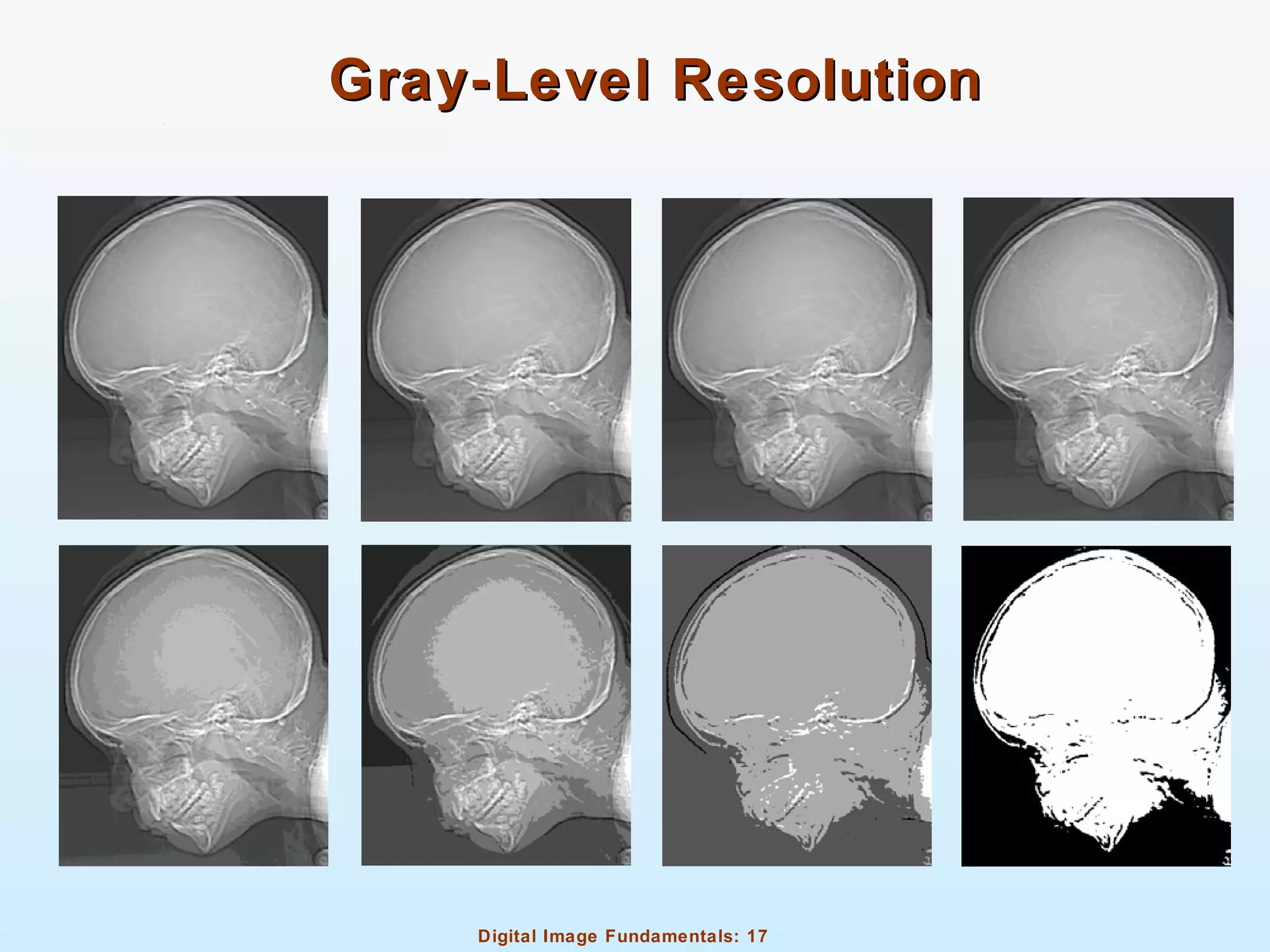
L – number of gray levels (dynamic range)
b – number of bits required to store a digital image
when M=N
2k
L = [0, 1]L −
b M N k= × ×
2
b N k= ×](https://image.slidesharecdn.com/03digitalimagefundamentals-130831074020-phpapp01/75/03-digital-image-fundamentals-DIP-13-2048.jpg)

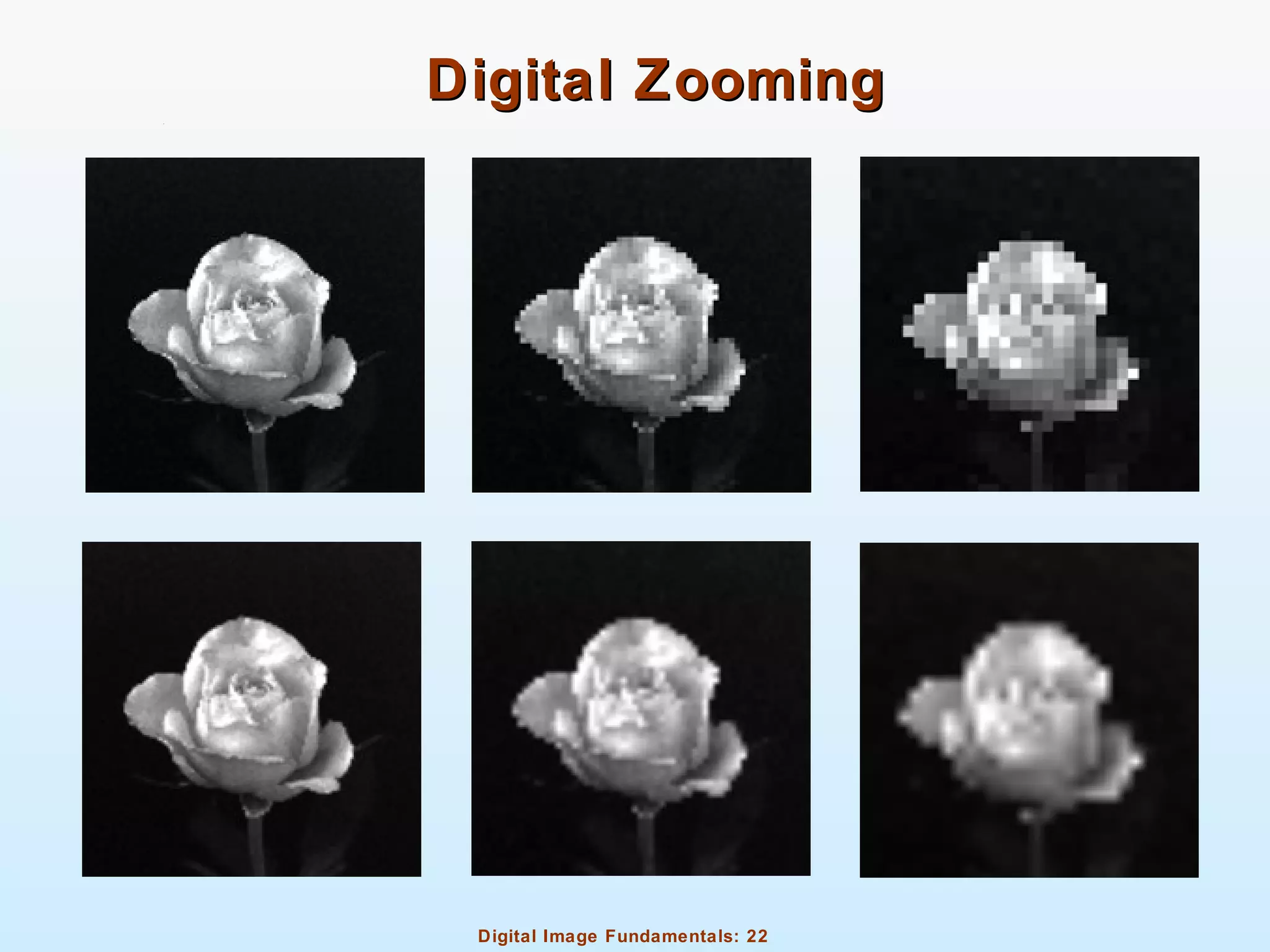

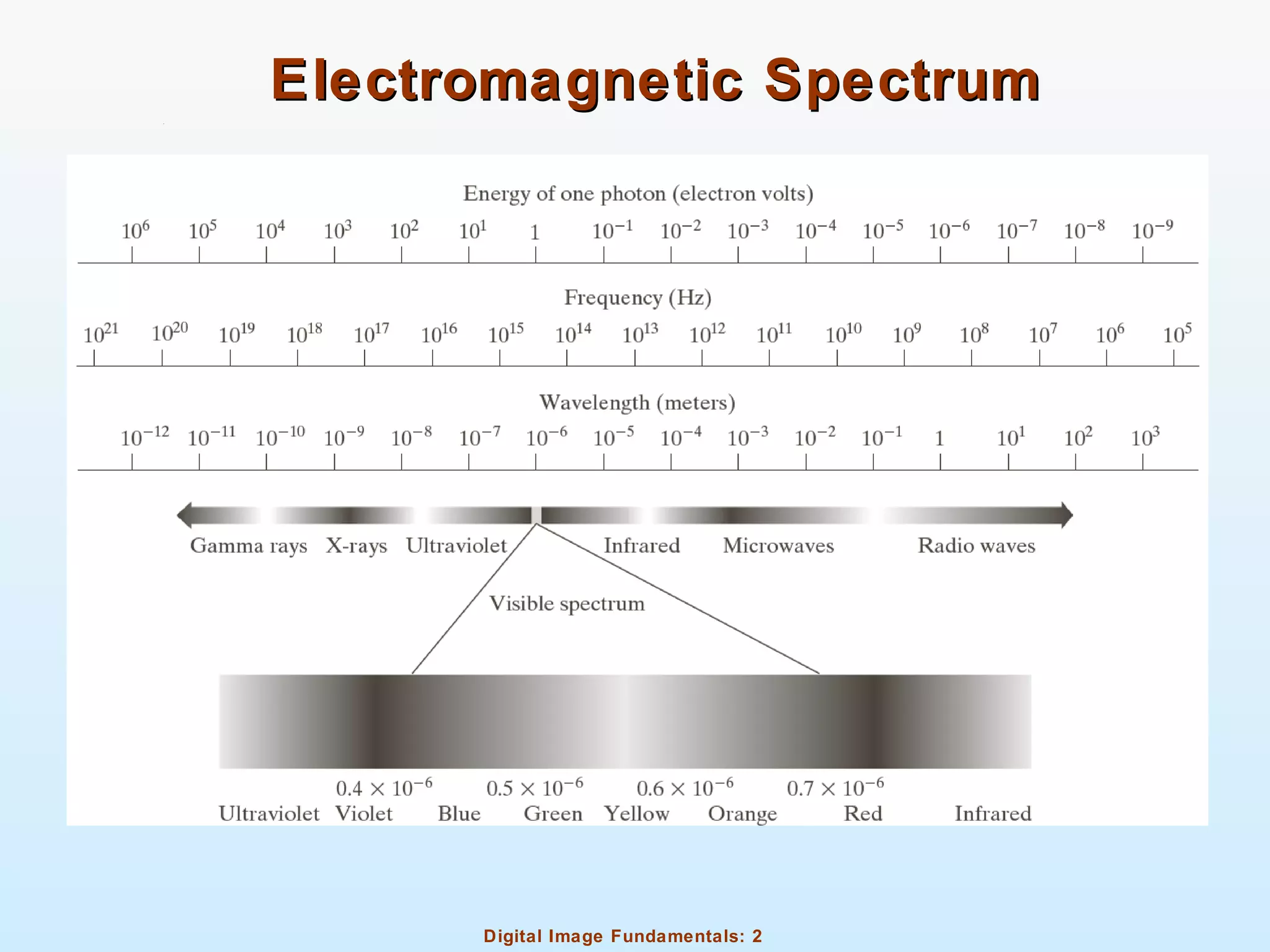
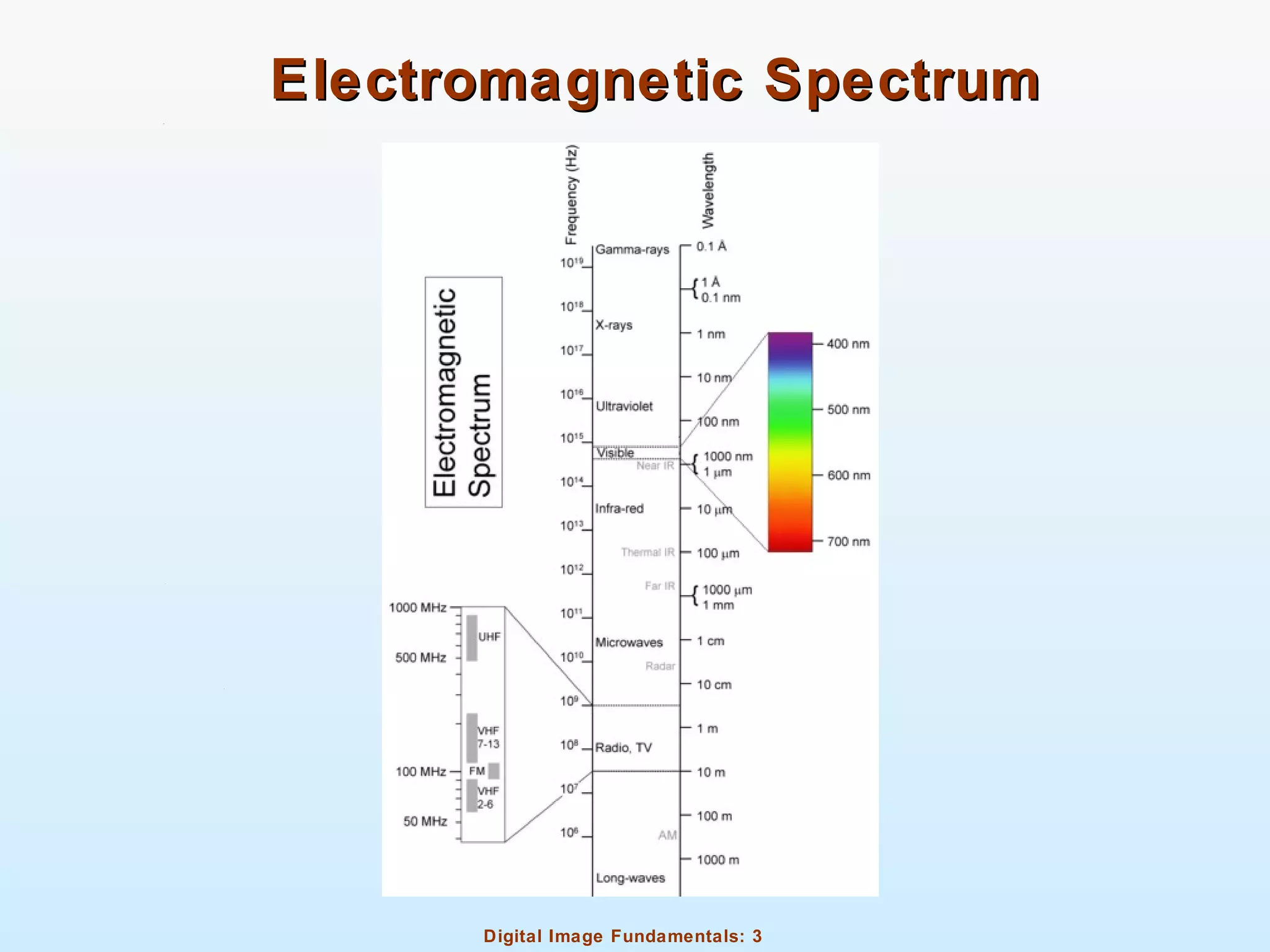
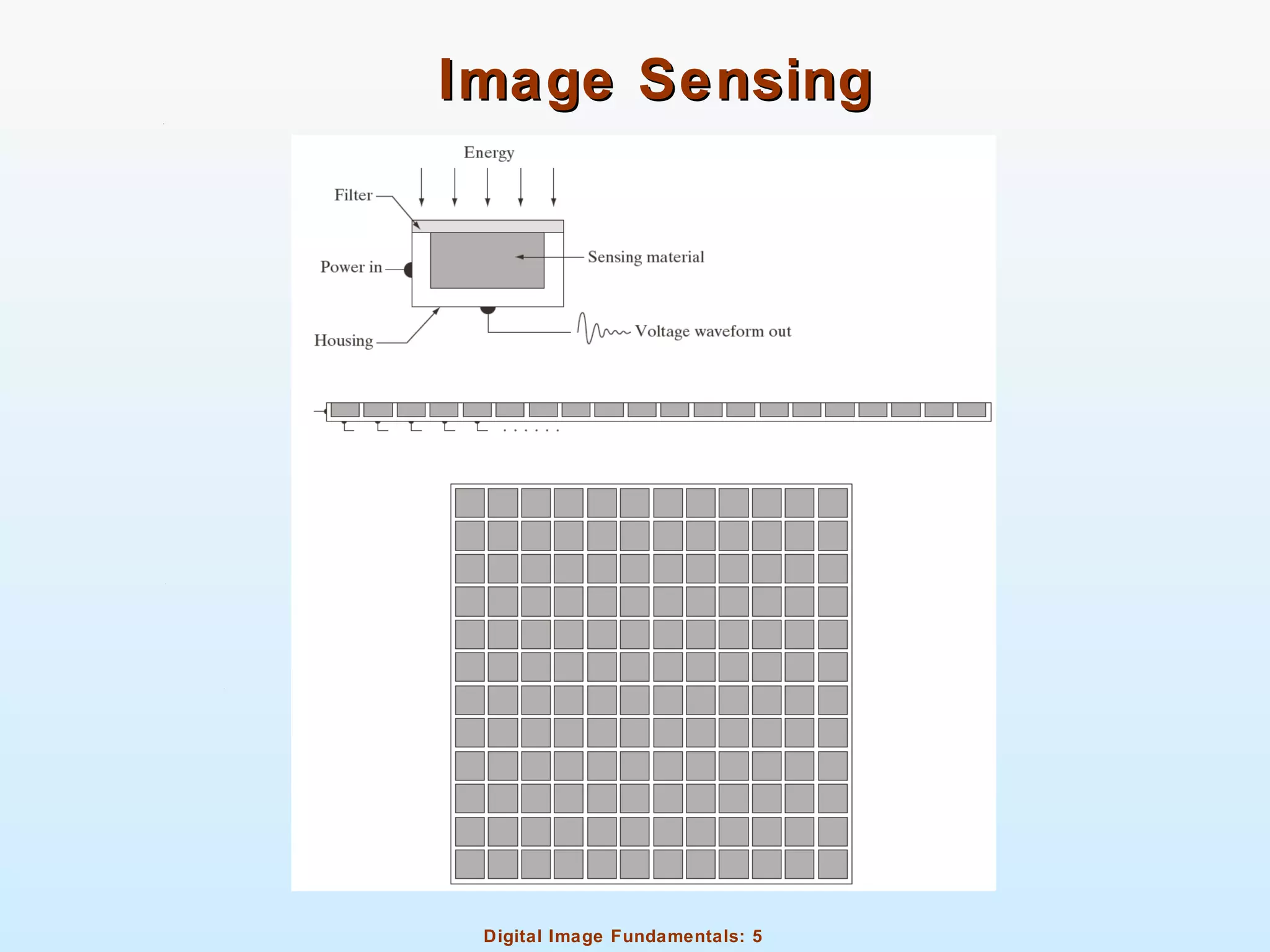
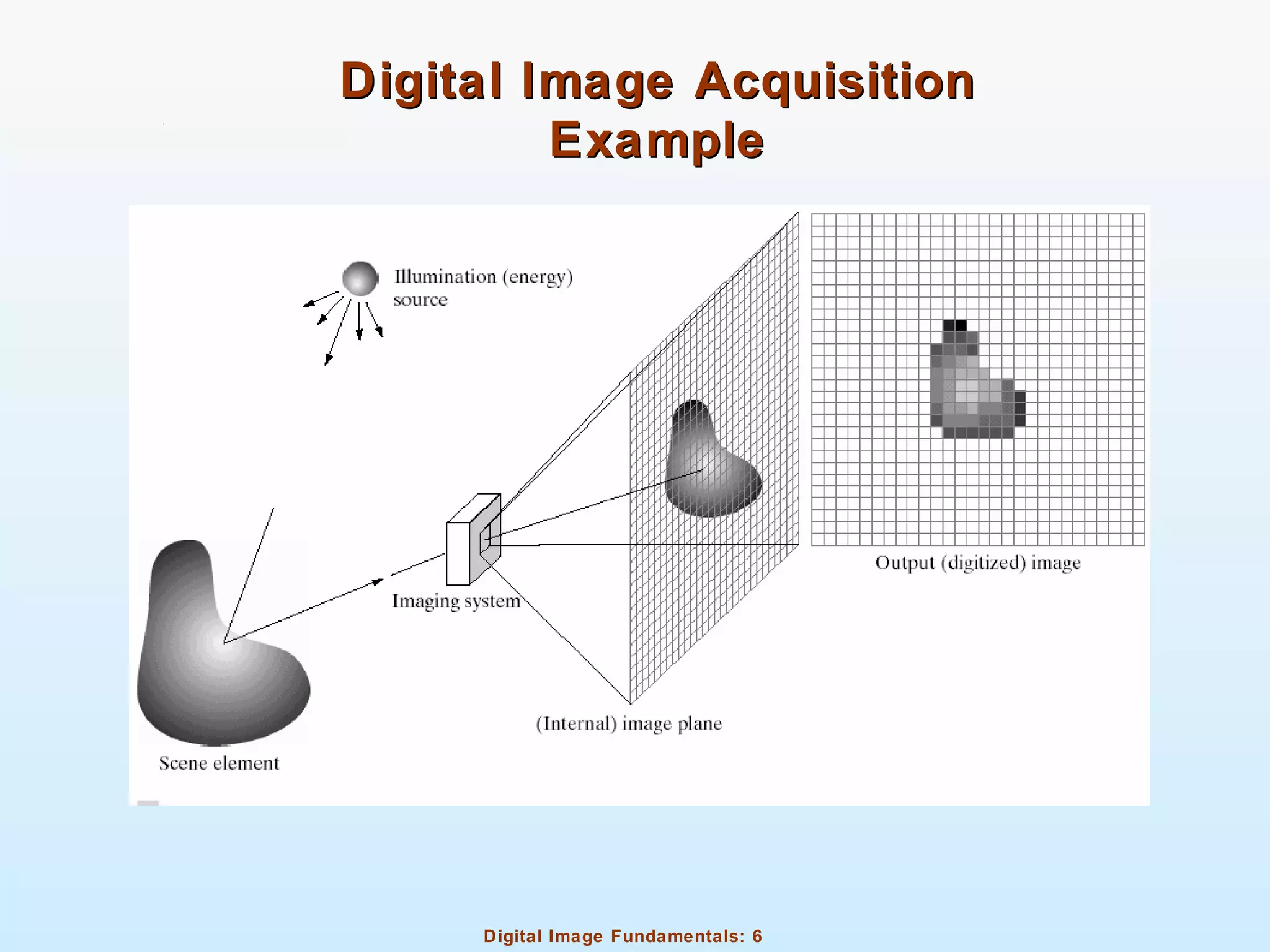
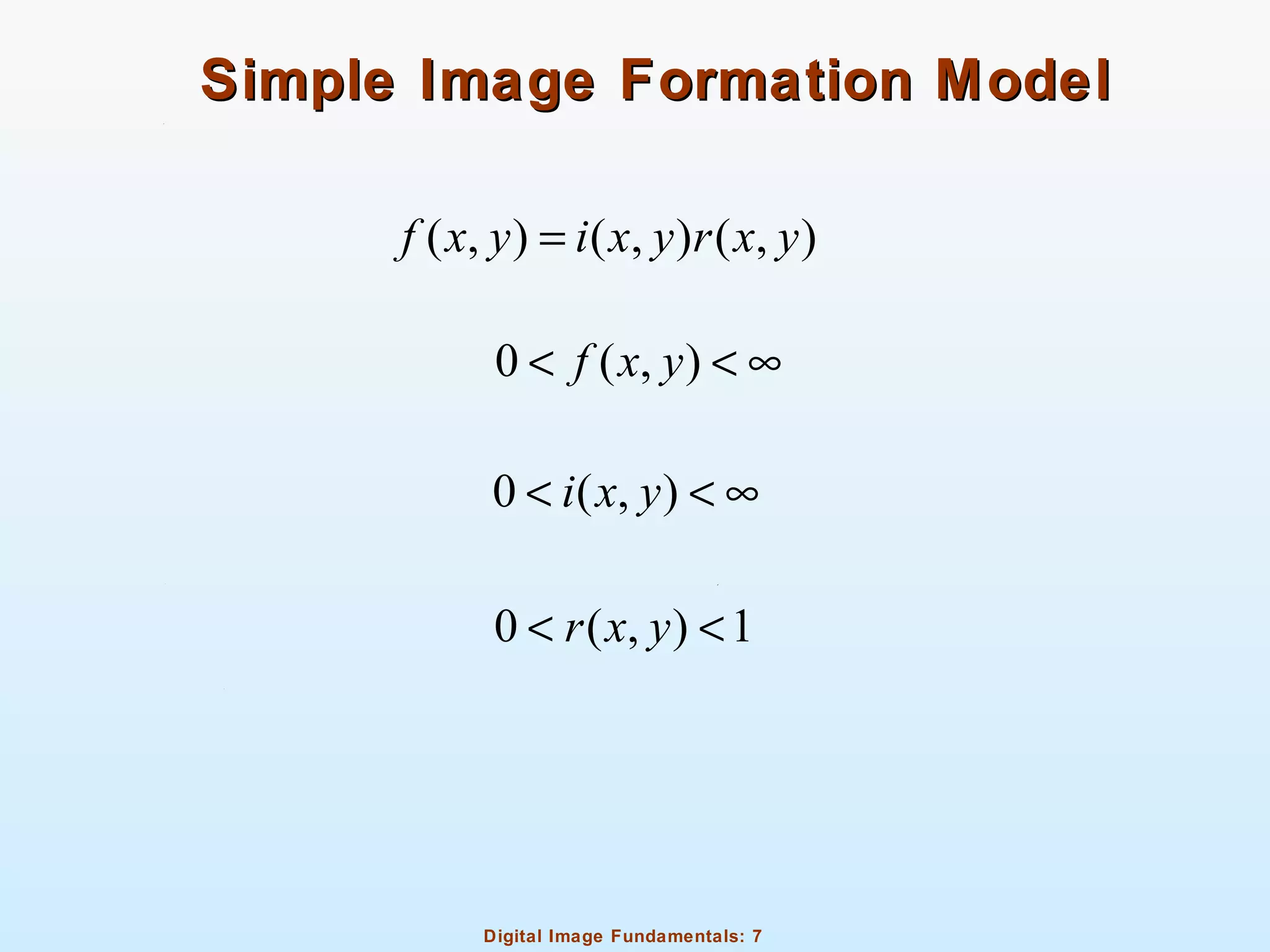
The document discusses key concepts in digital image fundamentals including: 1. The electromagnetic spectrum and how light attributes like intensity and luminance are measured. 2. How digital images are acquired through image sensing and sampling/quantization. 3. Methods for representing digital images through matrices and binary values, and how resolution affects gray-level detail. 4. Digital zooming techniques like nearest neighbor, bilinear, and bicubic interpolation that control blurring and edge effects. 5. Concepts like pixel adjacency, connectivity, and distance measures between pixels.