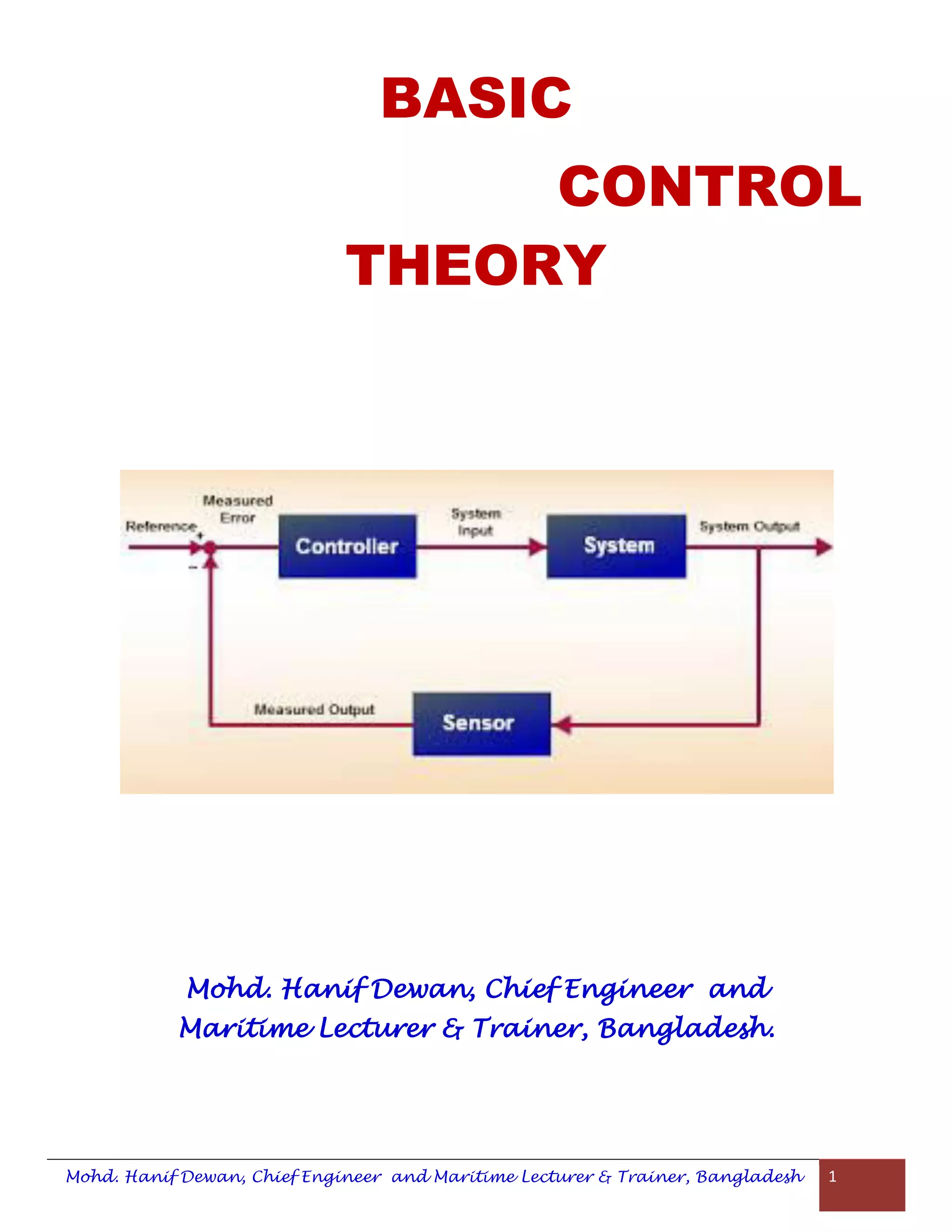








































This document provides an introduction to basic control theory, including different modes of control. It discusses on/off control, which is the most basic mode where a valve is either fully open or fully closed with no intermediate position. With on/off control, there is an upper and lower switching limit for the thermostat, and the temperature of the controlled medium will overshoot and undershoot these limits due to delays in the heat transfer process. Proportioning controllers can help improve on/off control by varying the ratio of on and off times based on the temperature deviation. Overall, the document covers fundamental control system components and terminology.