Downloaded 758 times
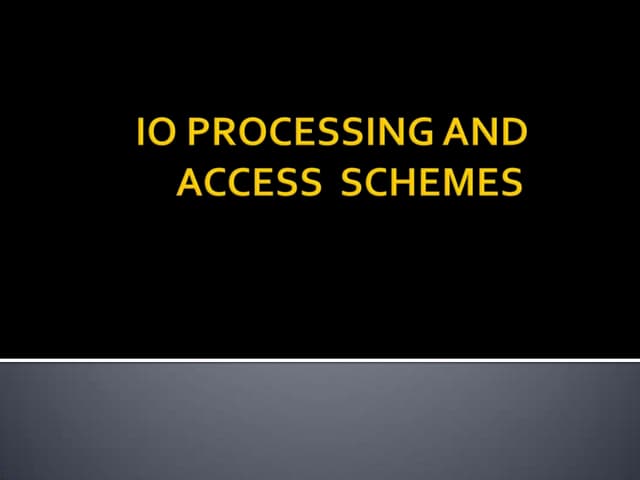
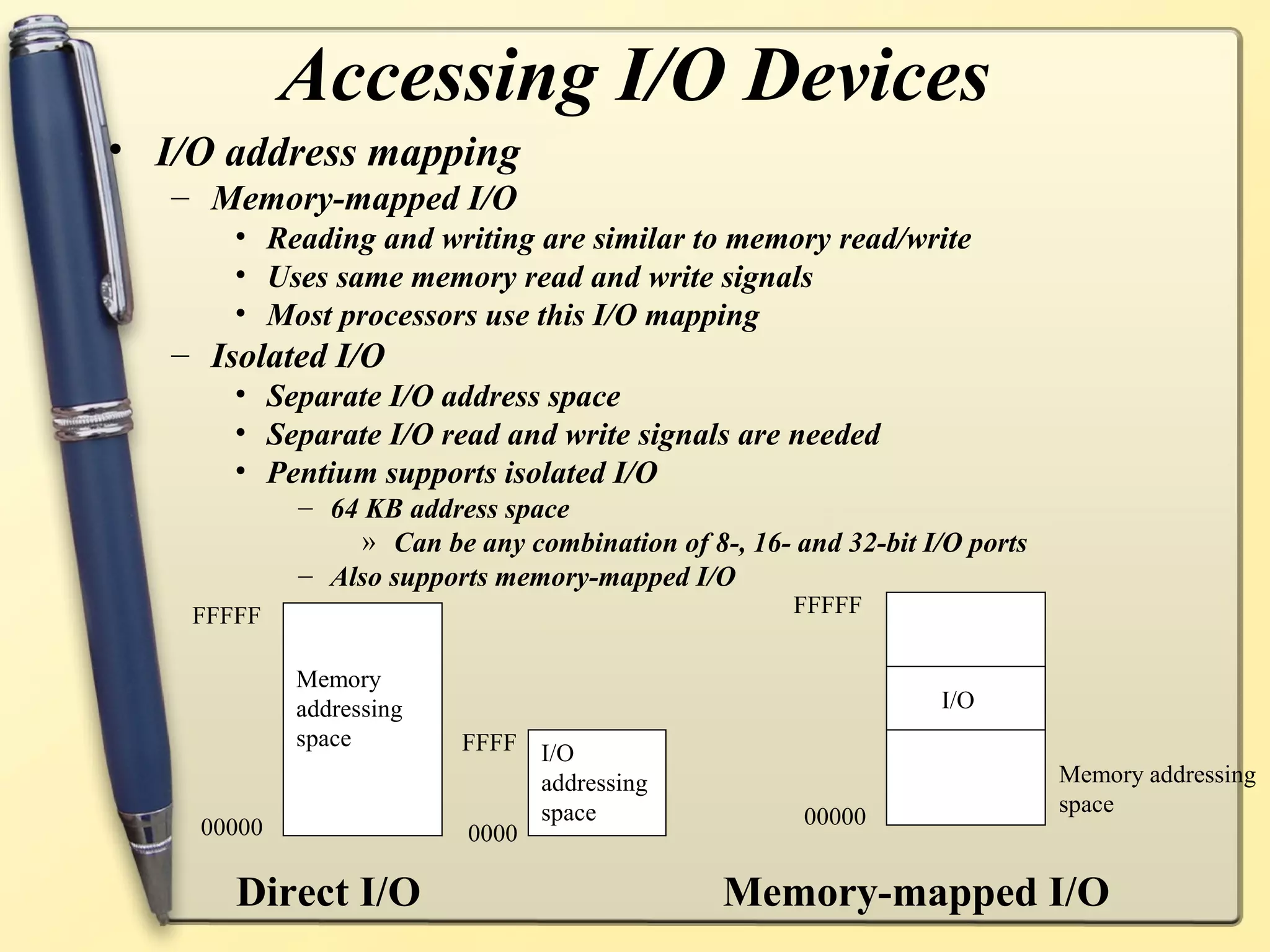
![Introduction (cont’d)
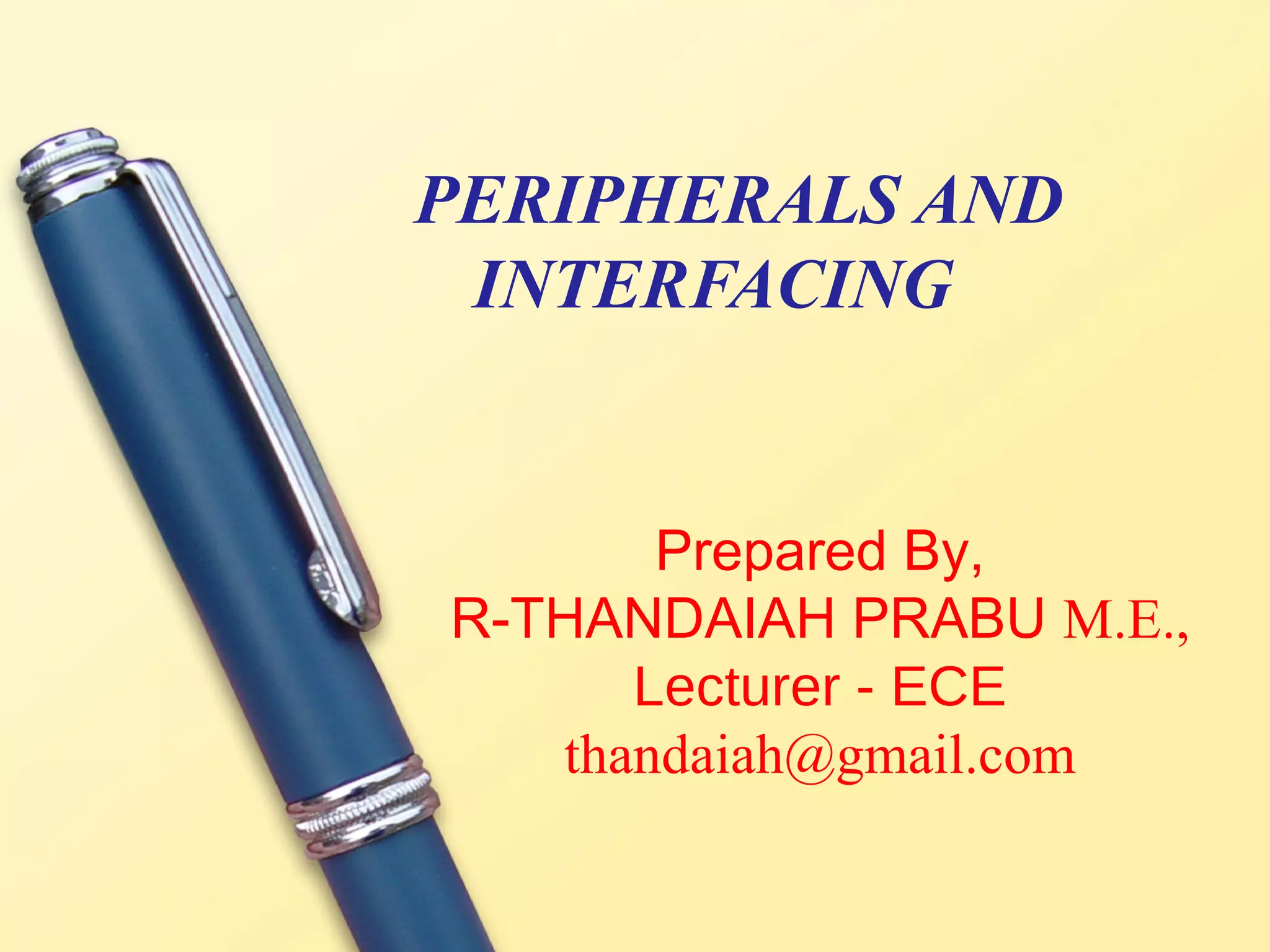
65,536 possible I/O ports
Data transfer between ports and the processor is over data bus
8088 uses address bus A[15:0] to locate an I/O port
AL (or AX) is the processor register that takes input data (or provide
output data)
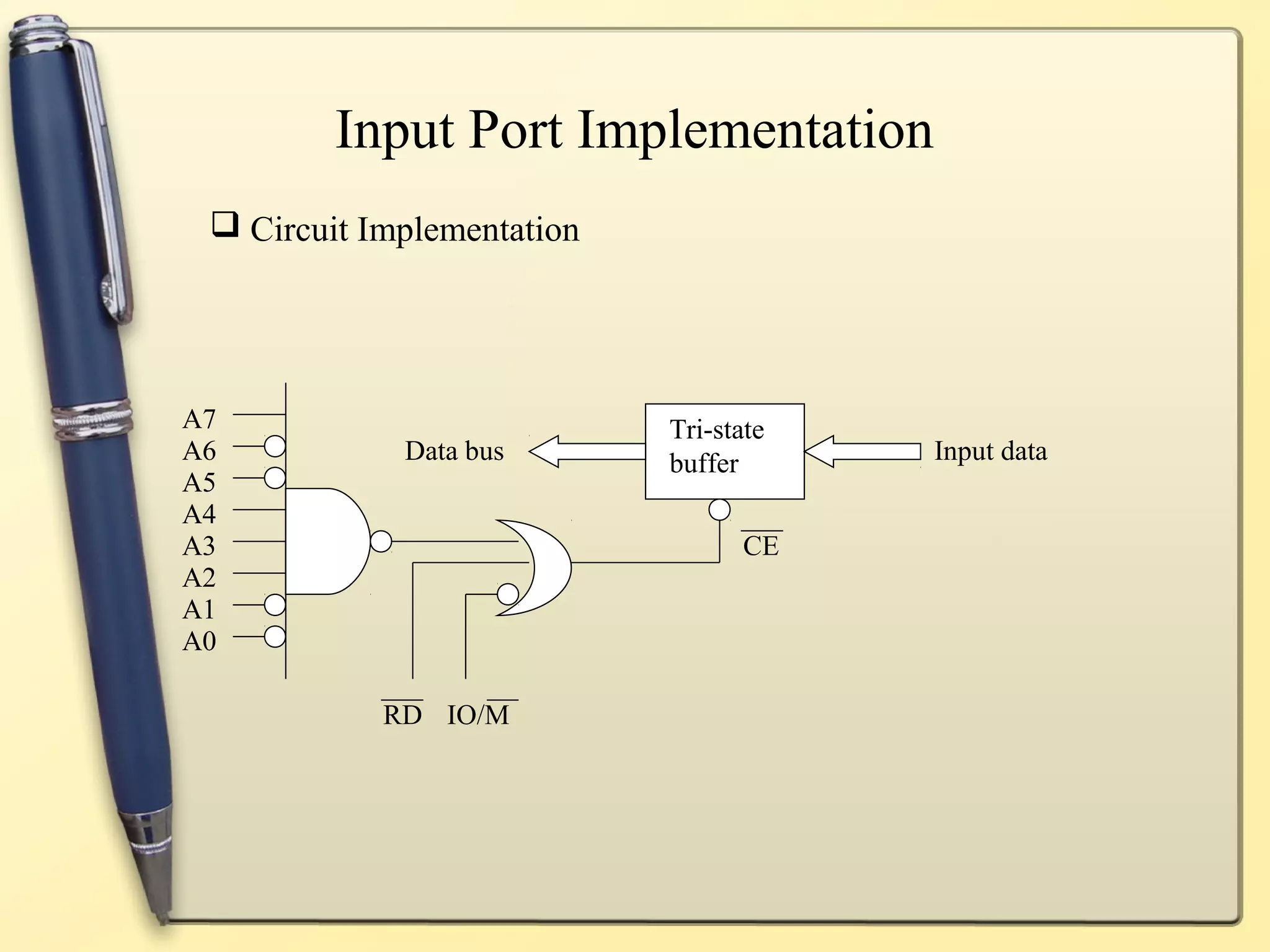
Data bus
AL
AX
I/O I/O I/O
8088
Address bus A[15:0]](https://image.slidesharecdn.com/interfacingicsformicroprocessor-121211140153-phpapp01/75/Interfacing-ics-for-microprocessor-2-2048.jpg)
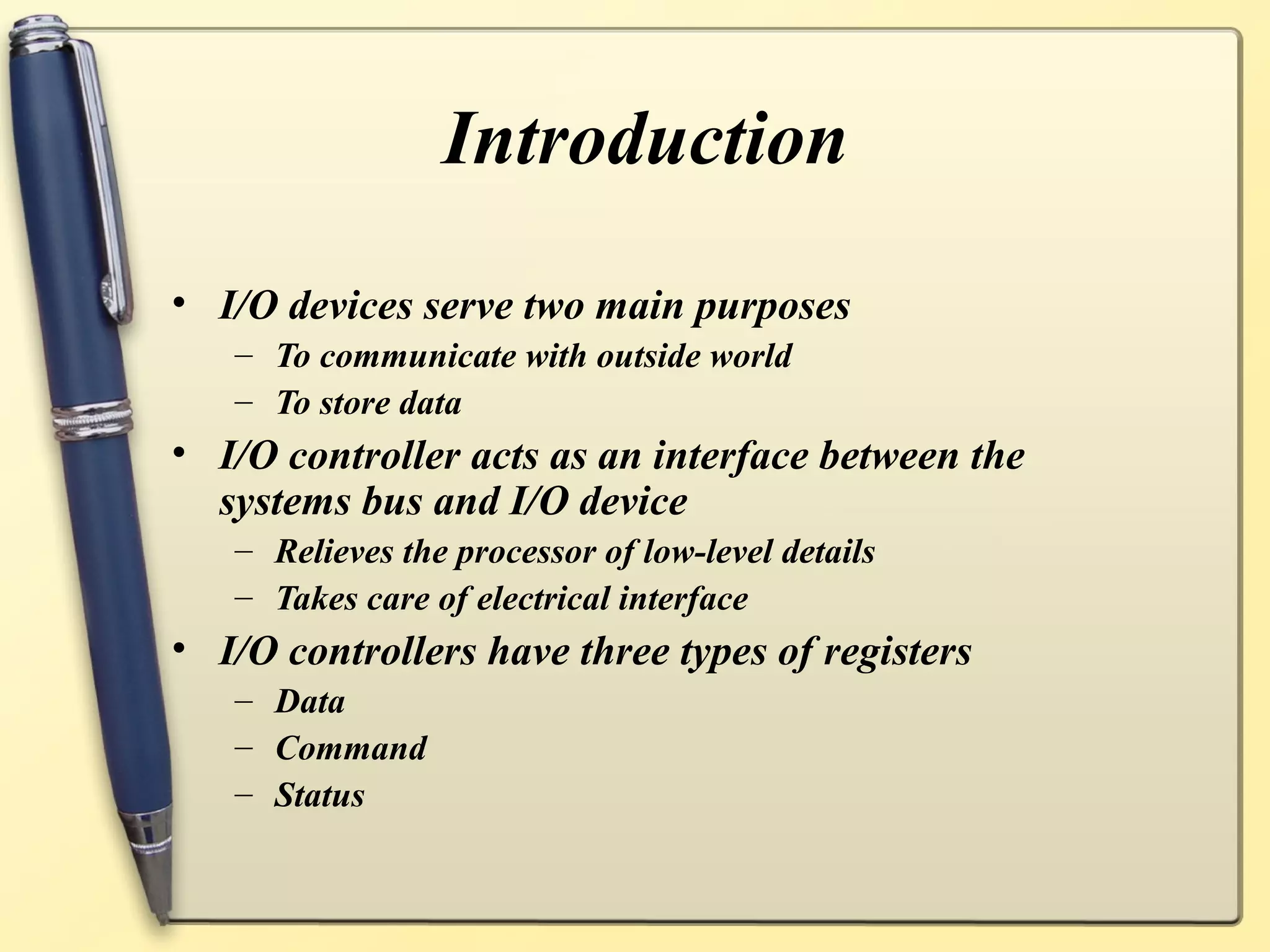
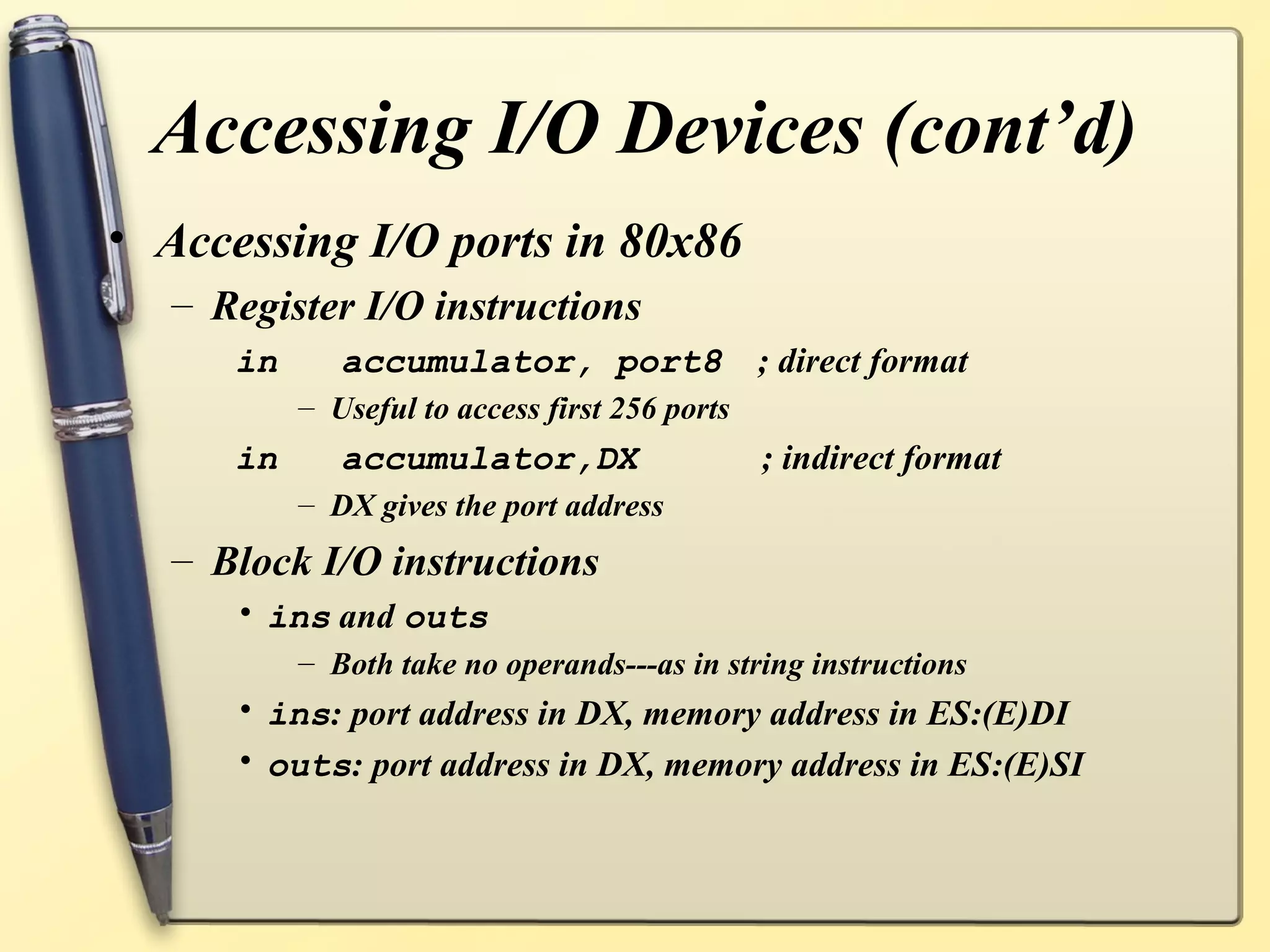
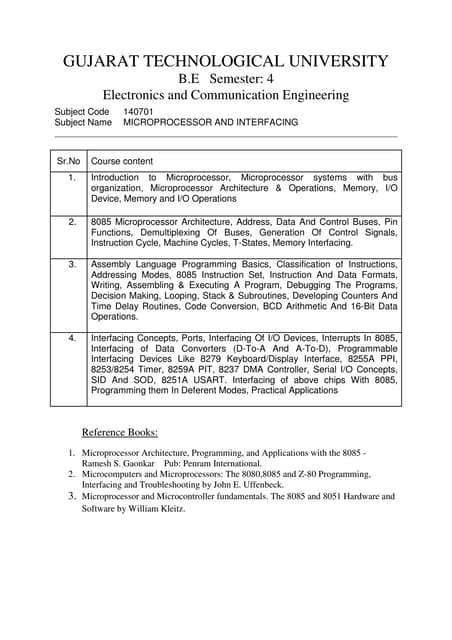
![• Check port P1 for nonzero condition. If any nonzero number is
there in [accumulator], start column scanning by following step
9.
• Otherwise make next row high in port P1.
• Add a count of 08h to the counter to move to the next row by
repeating steps from step 6.
• If any key pressed is found, the [accumulator] content is rotated
right through the carry until carry bit sets, while doing this
increment the count in the counter till carry is found.
• Move the content in the counter to display in data field or to
memory location
• To repeat the procedures go to step 2.
SJCET](https://image.slidesharecdn.com/interfacingicsformicroprocessor-121211140153-phpapp01/75/Interfacing-ics-for-microprocessor-22-2048.jpg)
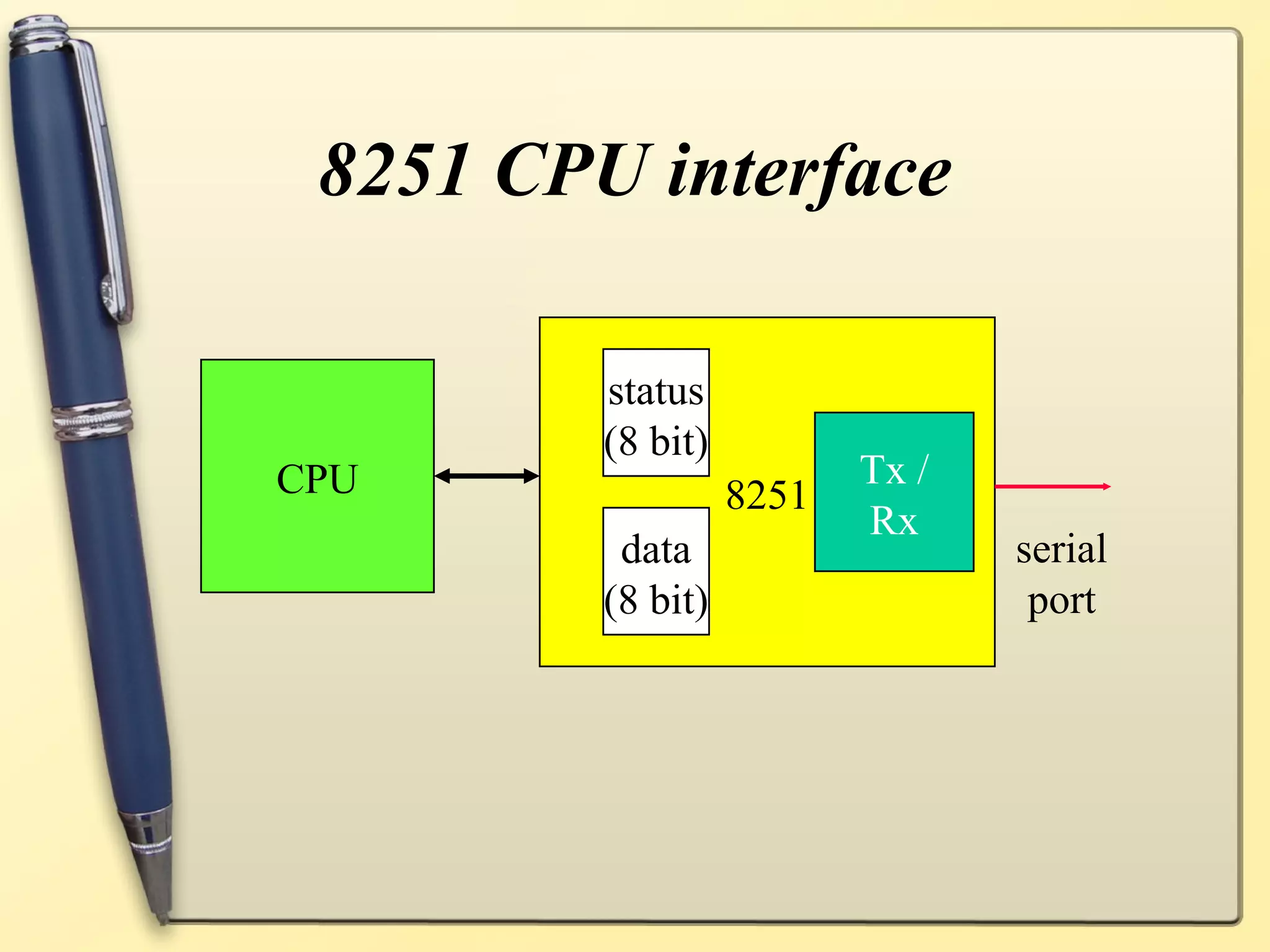
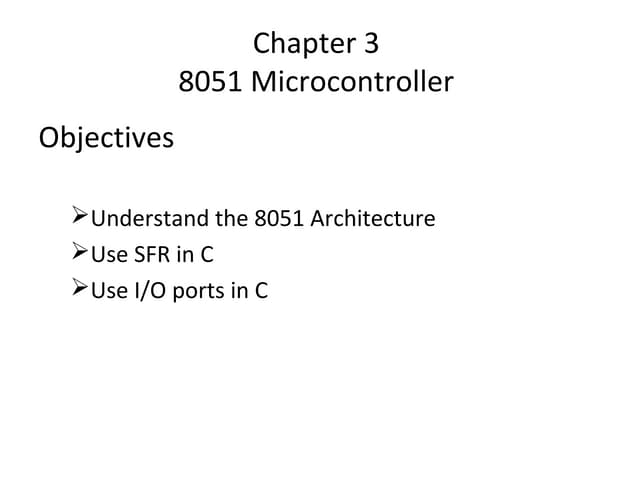
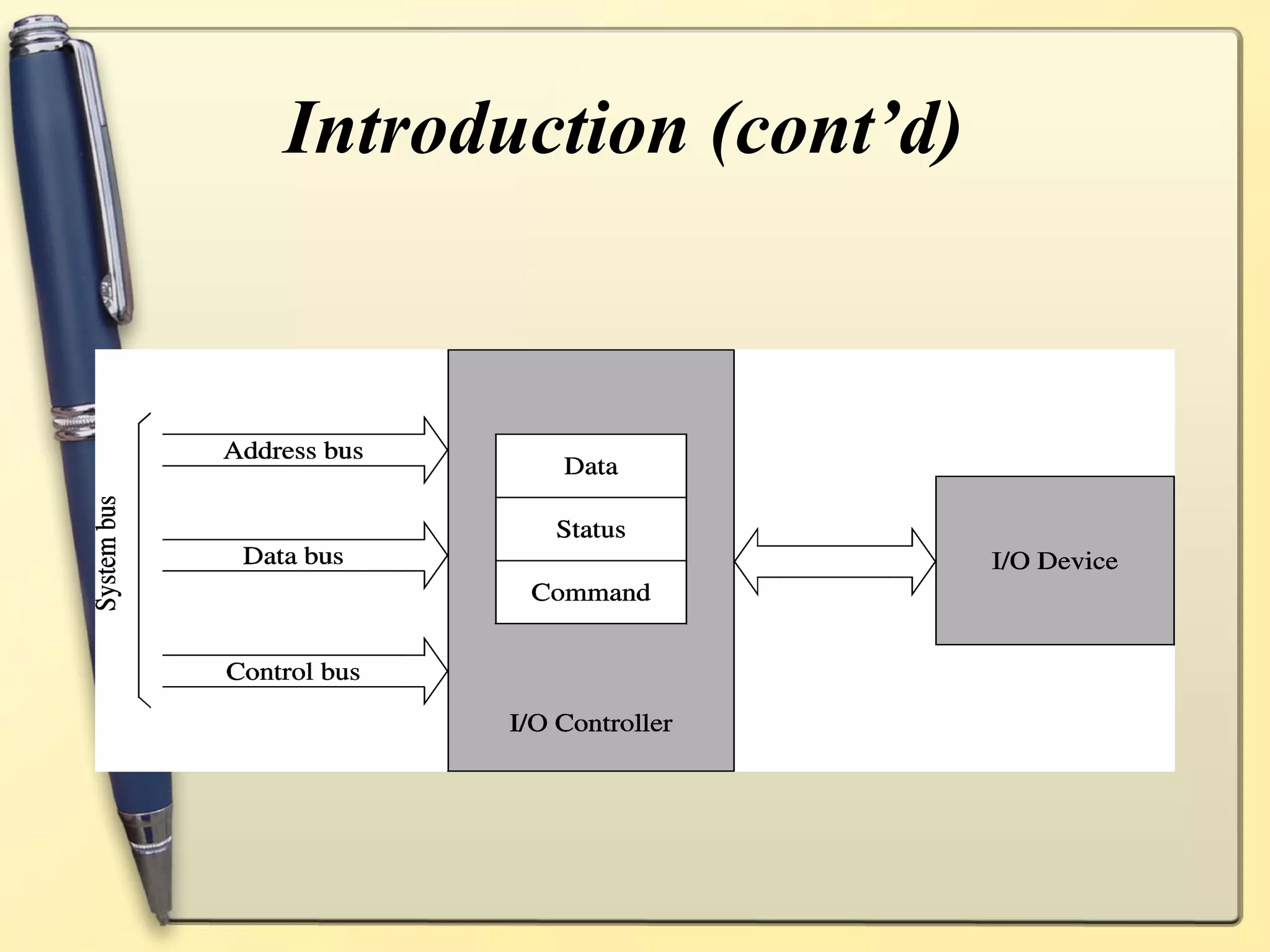
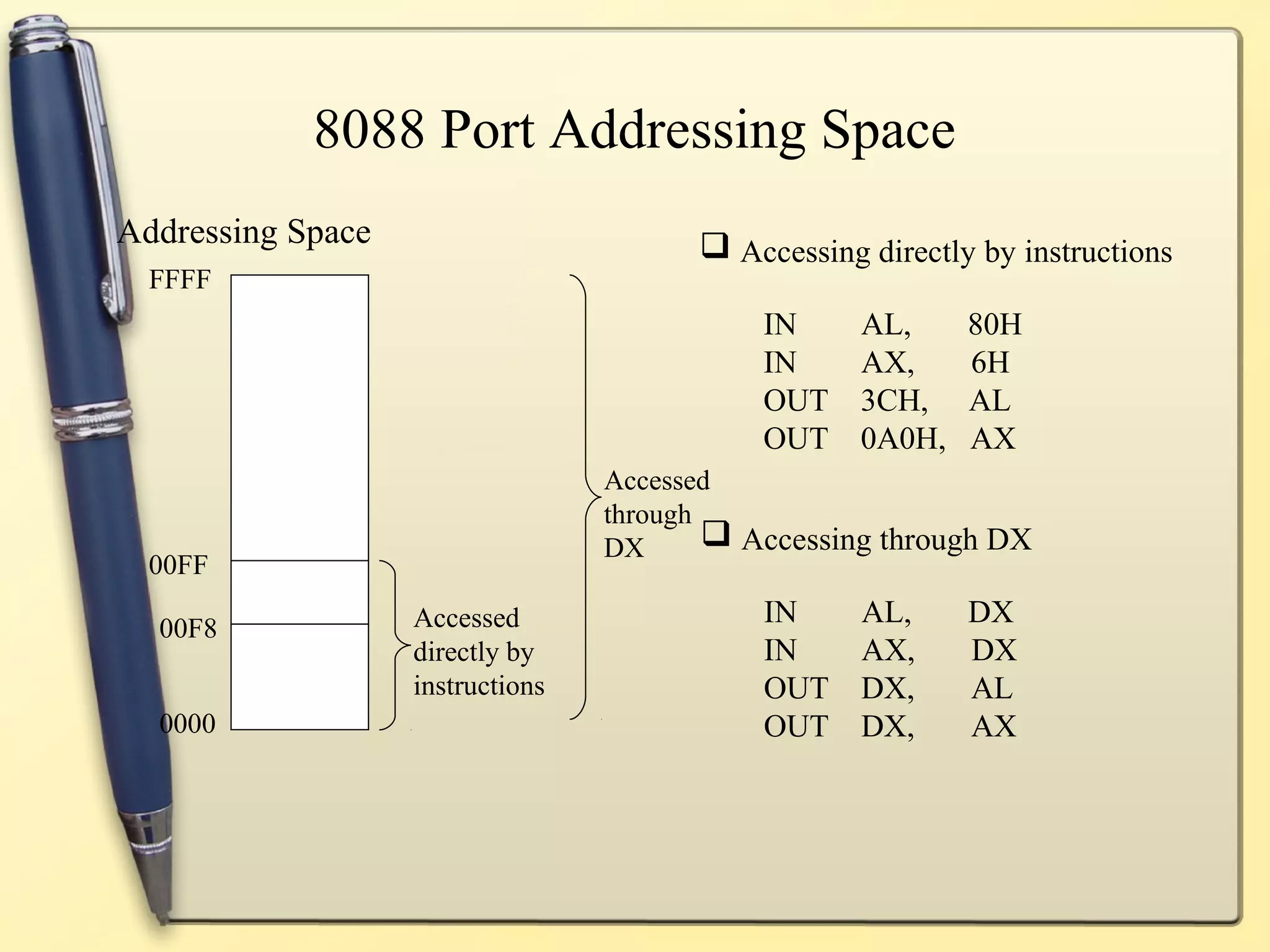
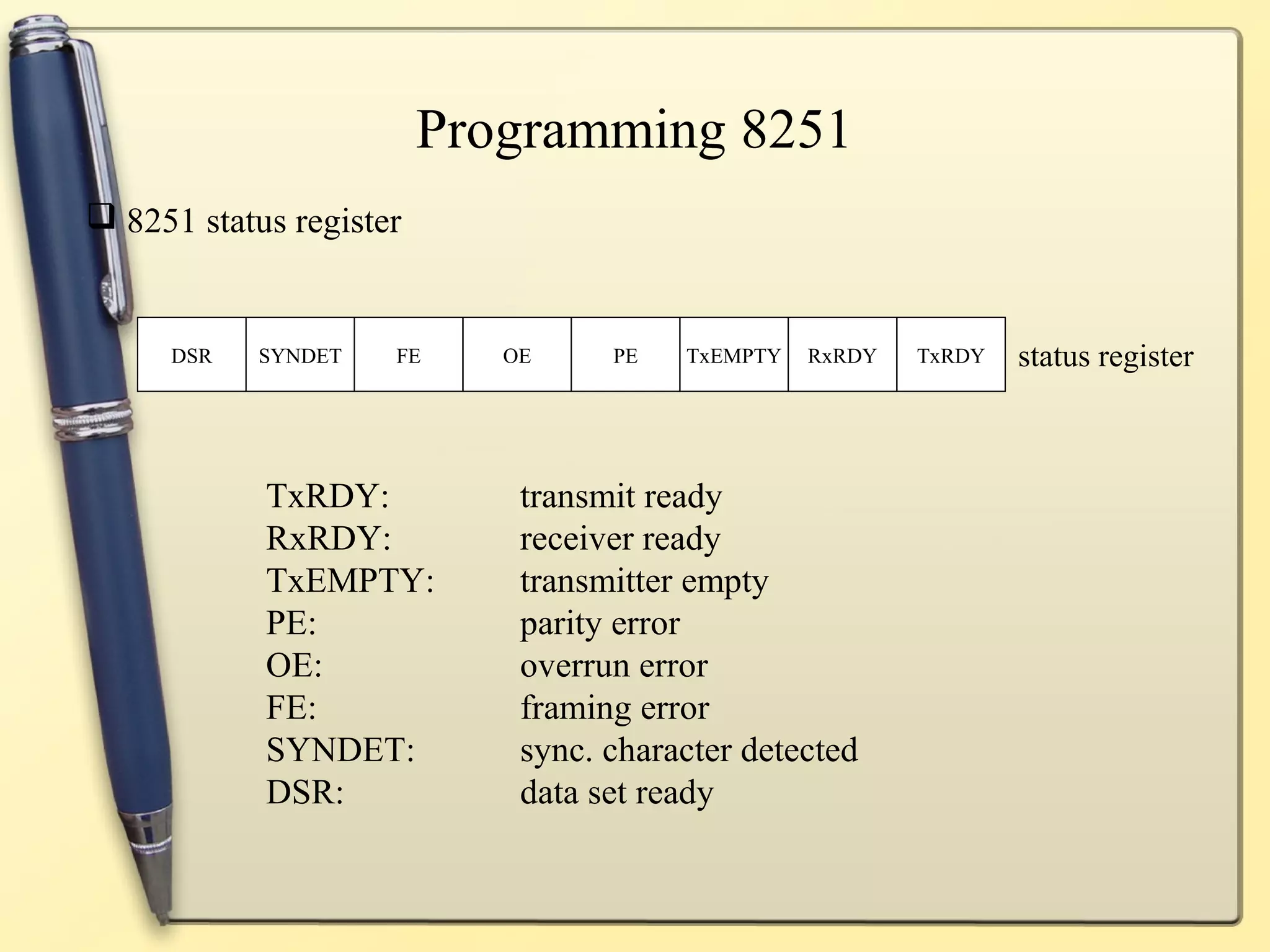
![8251 USART Interface
8251 RS232
D[7:0] TxD
RD RD RxD
WR WR
A0 C/D
TxC
CLK CLK RxC
A7
A6
A5
A4
A3
A2
A1
IO/M](https://image.slidesharecdn.com/interfacingicsformicroprocessor-121211140153-phpapp01/75/Interfacing-ics-for-microprocessor-41-2048.jpg)

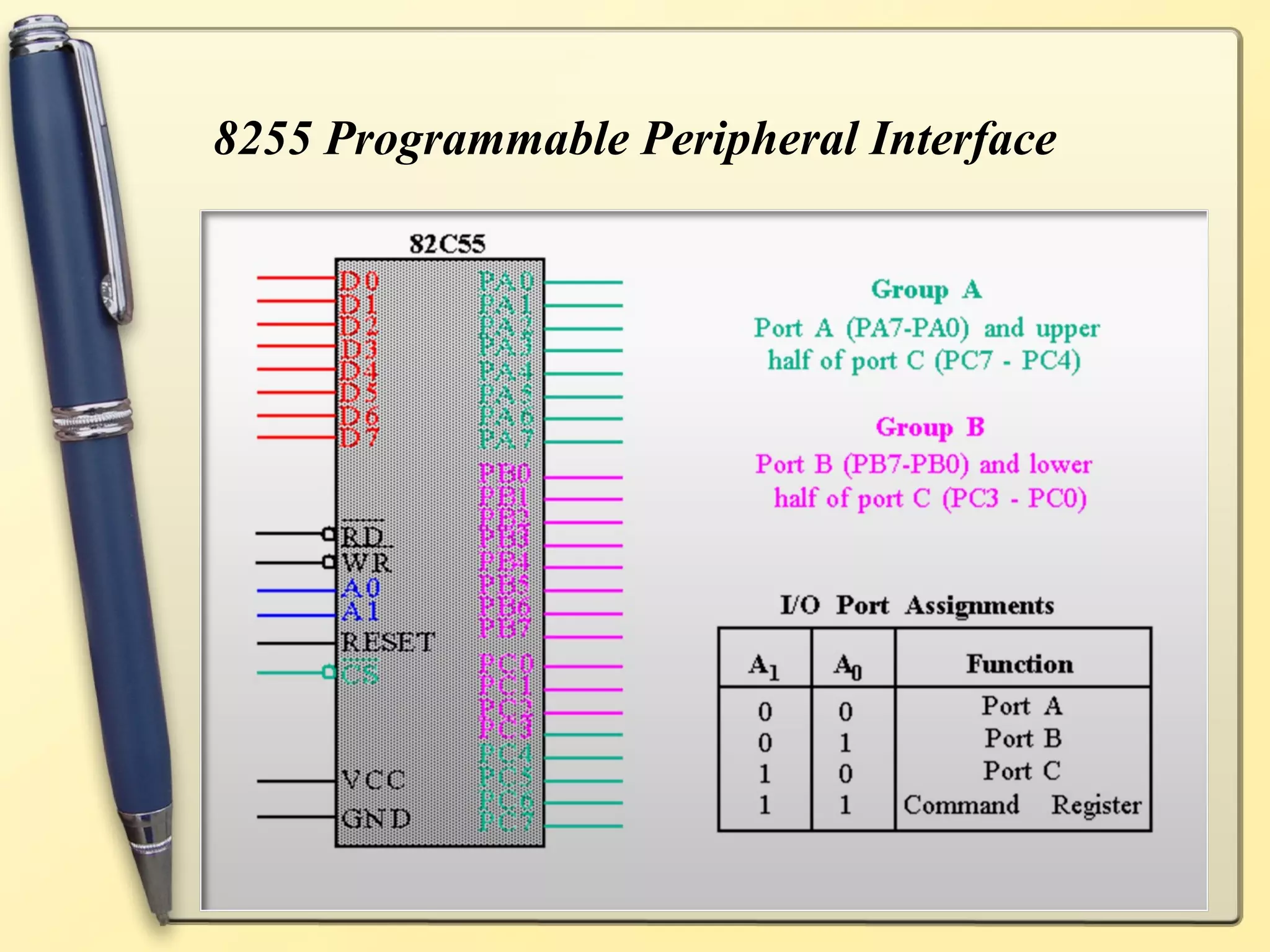
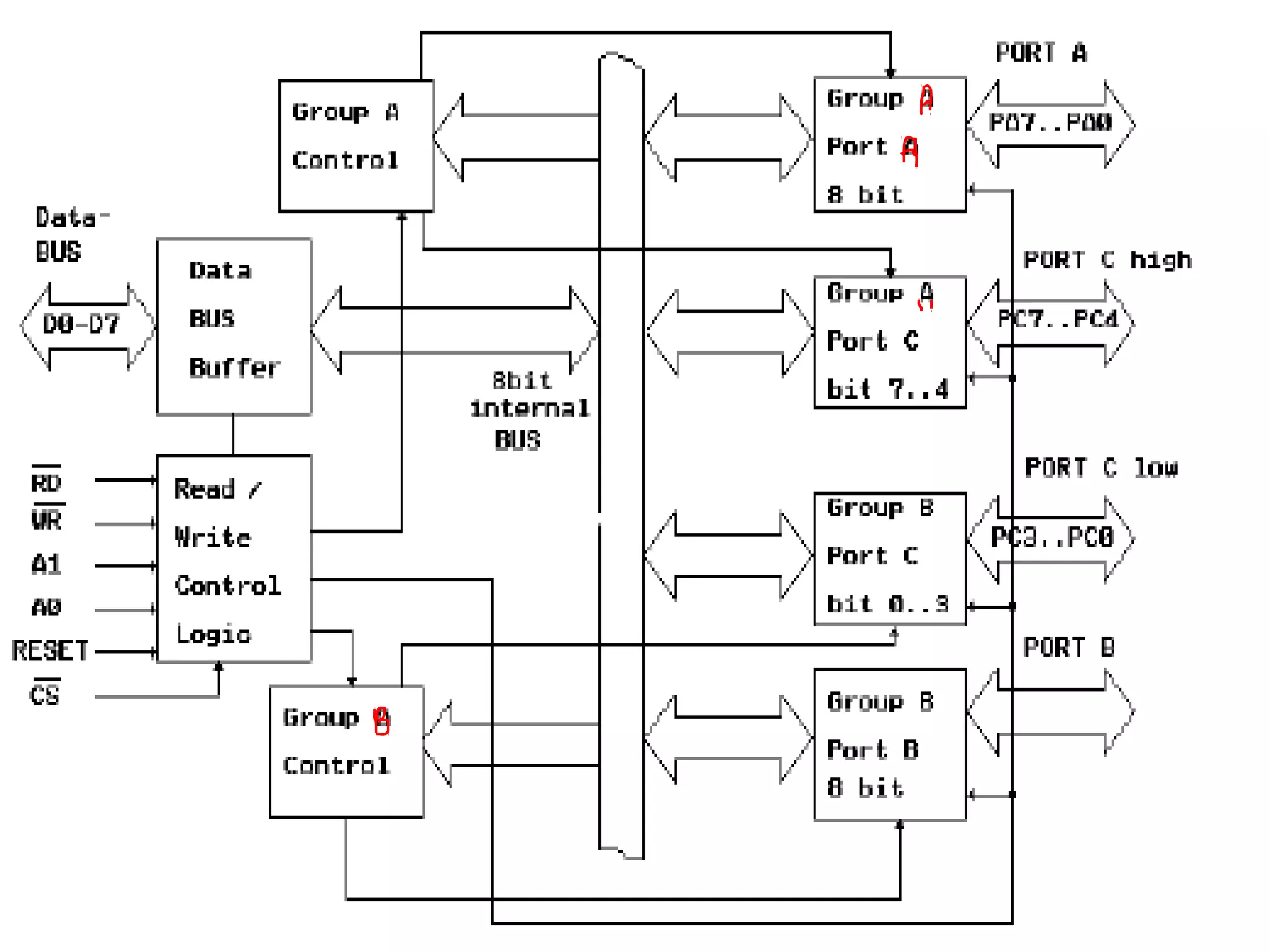
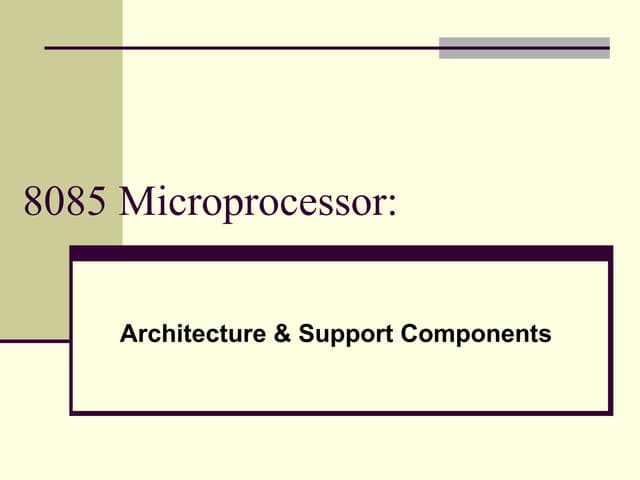
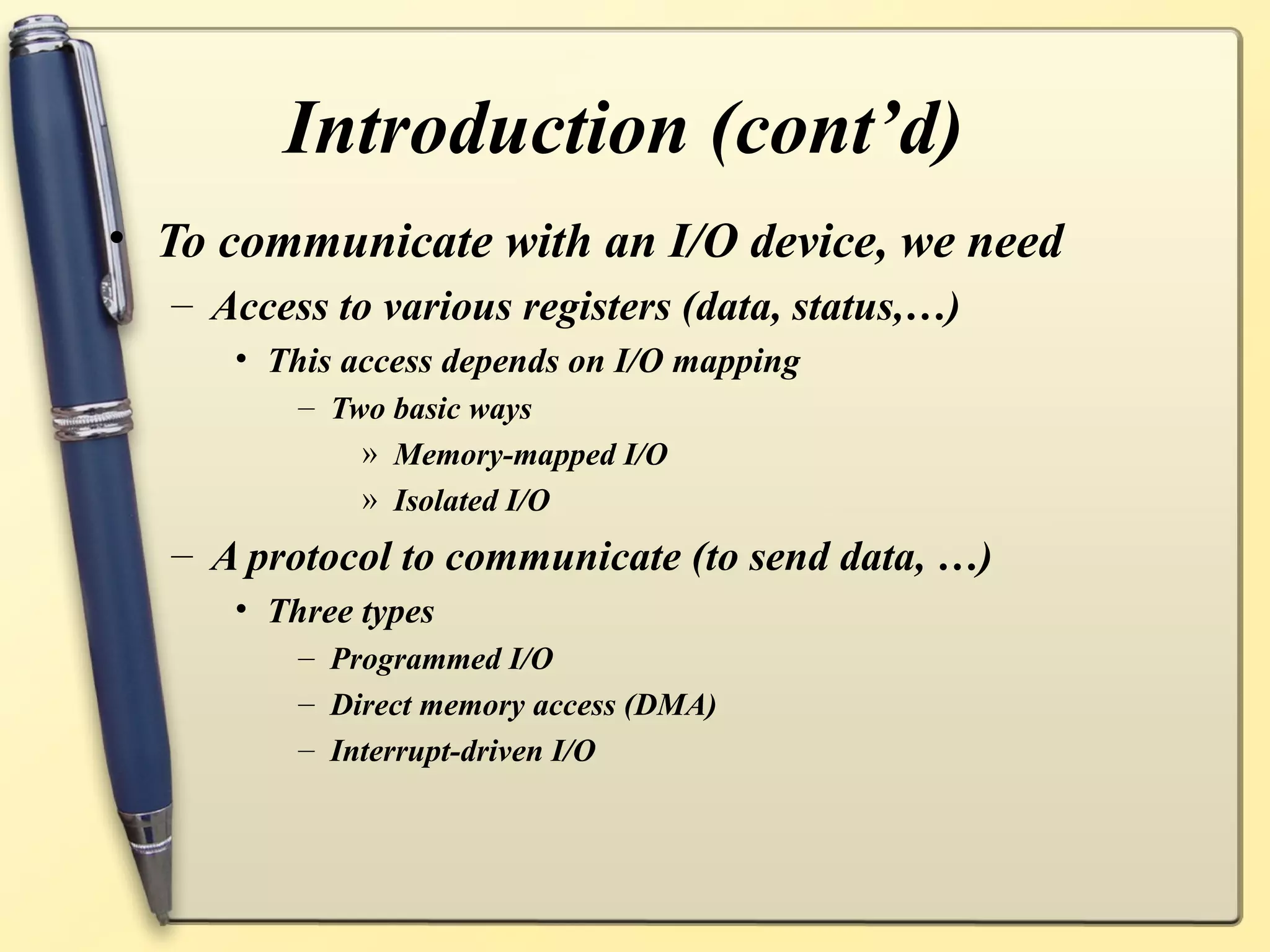
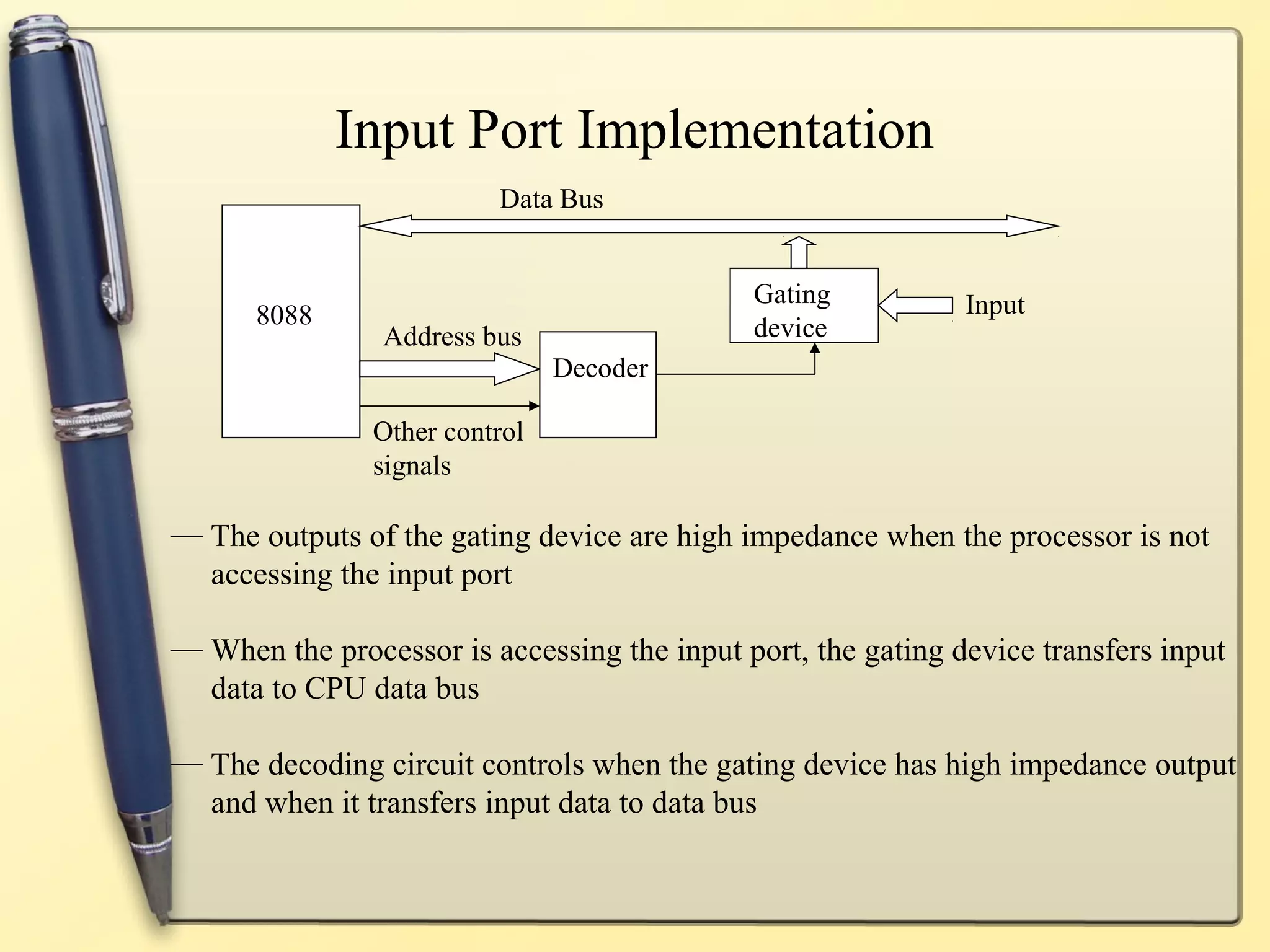
![8255 Programmable Peripheral Interface
Data bus
D[7:0]
PA[7:0]
A0
8088 A1 PB[7:0]
RD Control port
WR PC[7:0]
RESET
A7 CS
A6
A5
A4
A3
A2 A1 A0 Port
IO/M
0 0 PA
0 1 PB
1 0 PC
1 1 Control](https://image.slidesharecdn.com/interfacingicsformicroprocessor-121211140153-phpapp01/75/Interfacing-ics-for-microprocessor-56-2048.jpg)
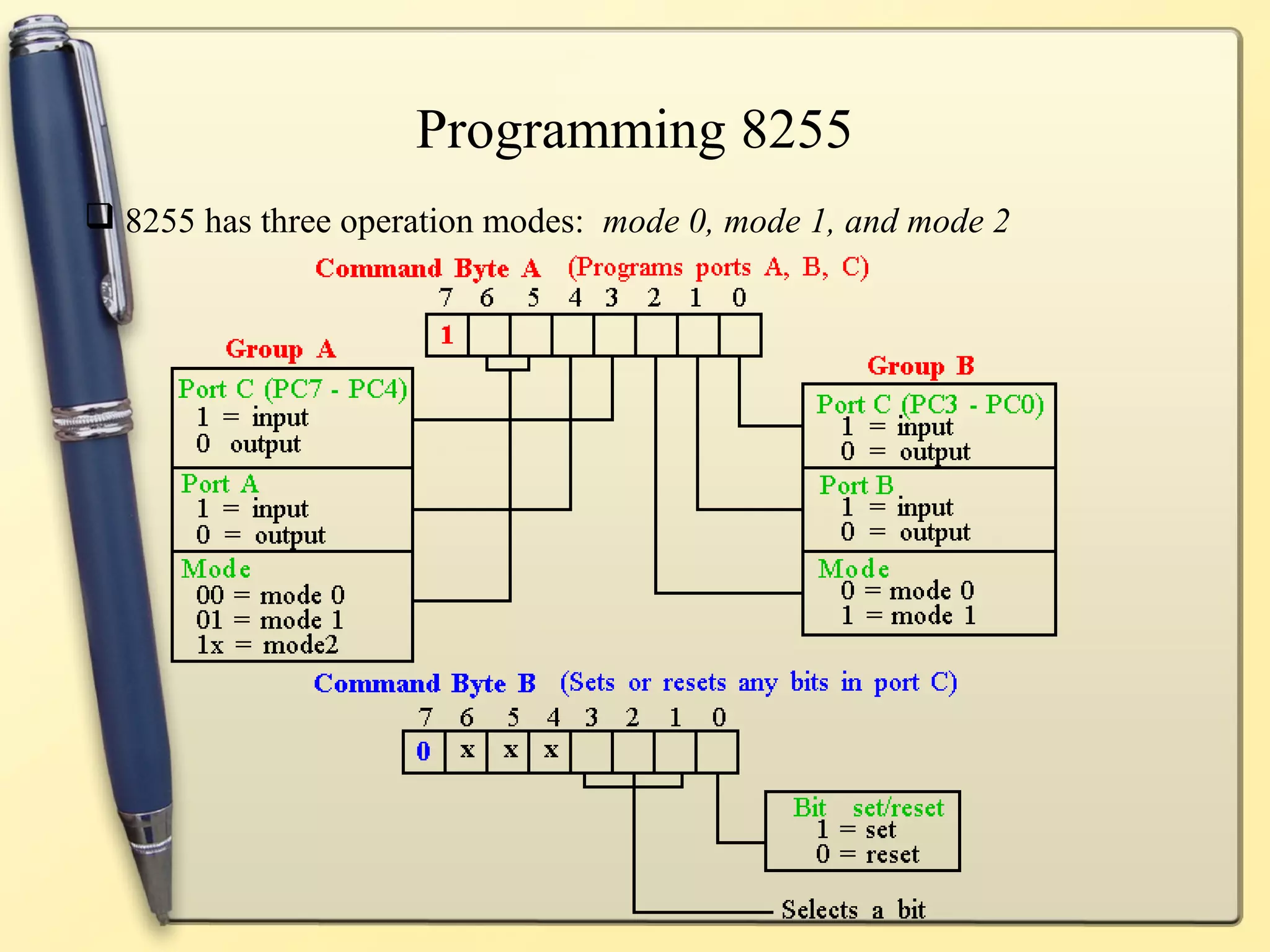
![Programming 8255
Mode 0:
— Ports A, B, and C can be individually programmed as input or output ports
— Port C is divided into two 4-bit ports which are independent from each other
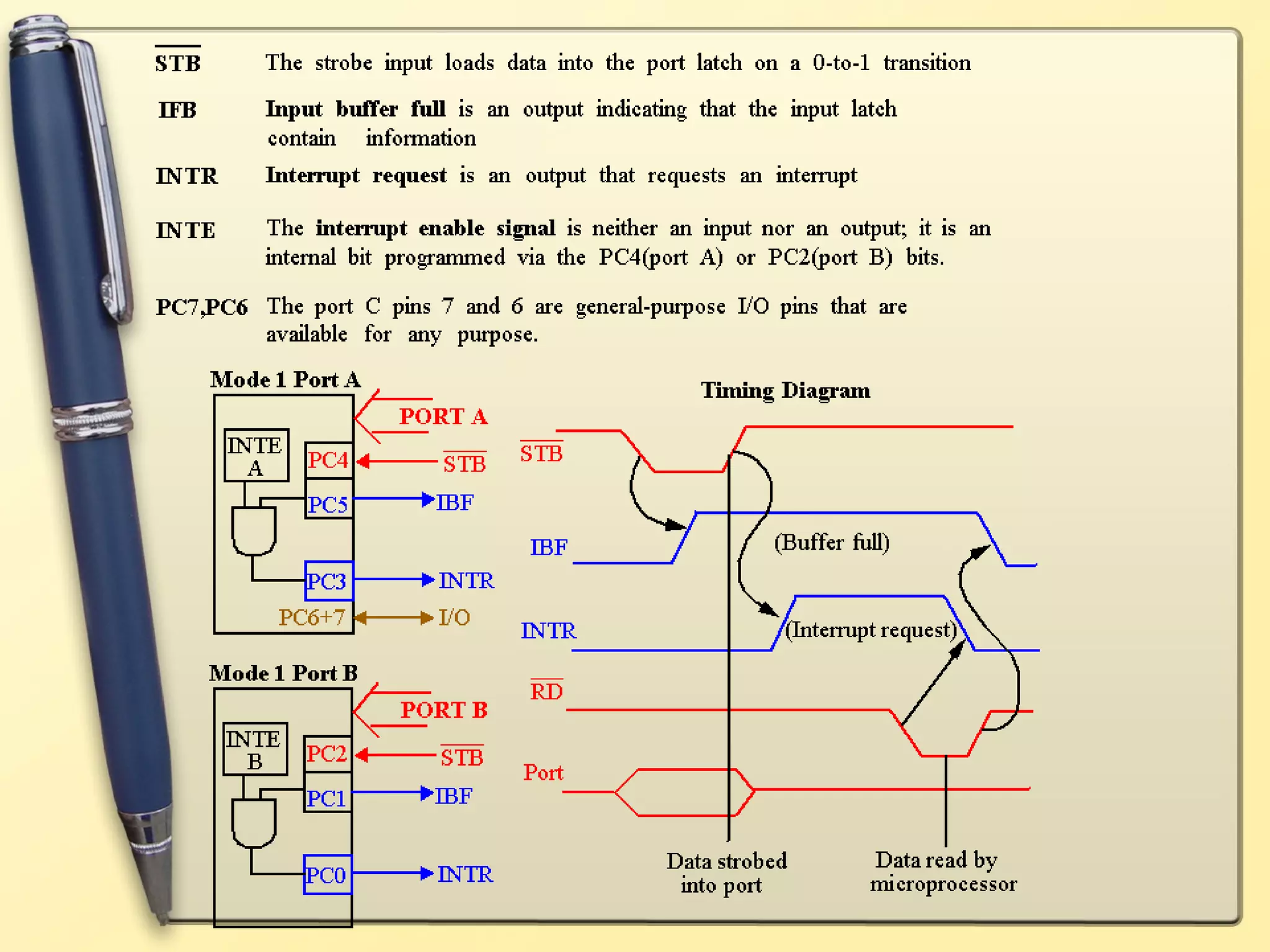
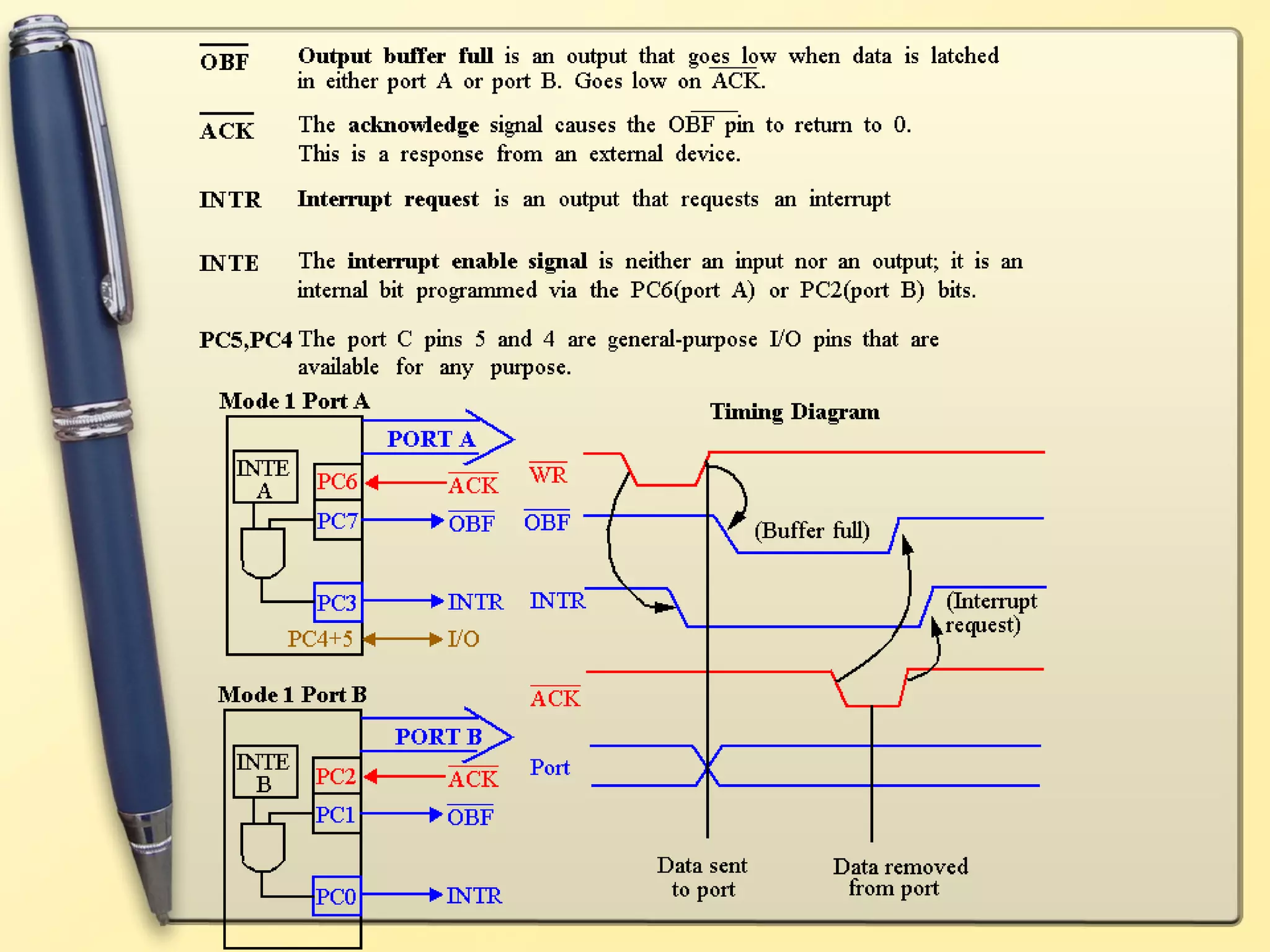
Mode 1:
— Ports A and B are programmed as input or output ports
— Port C is used for handshaking
PA[7:0] PA[7:0]
PC4 STBA PC7 OBFA
PC5 IBFA PC6 ACKA
PC3 INTRA PC3 INTRA
8255 PB[7:0] 8255 PB[7:0]
PC2 STBB PC2 OBFB
PC1 IBFB PC1 ACKB
PC0 INTRB PC0 INTRB
PC6, 7 PC4, 5](https://image.slidesharecdn.com/interfacingicsformicroprocessor-121211140153-phpapp01/75/Interfacing-ics-for-microprocessor-61-2048.jpg)
![Programming 8255
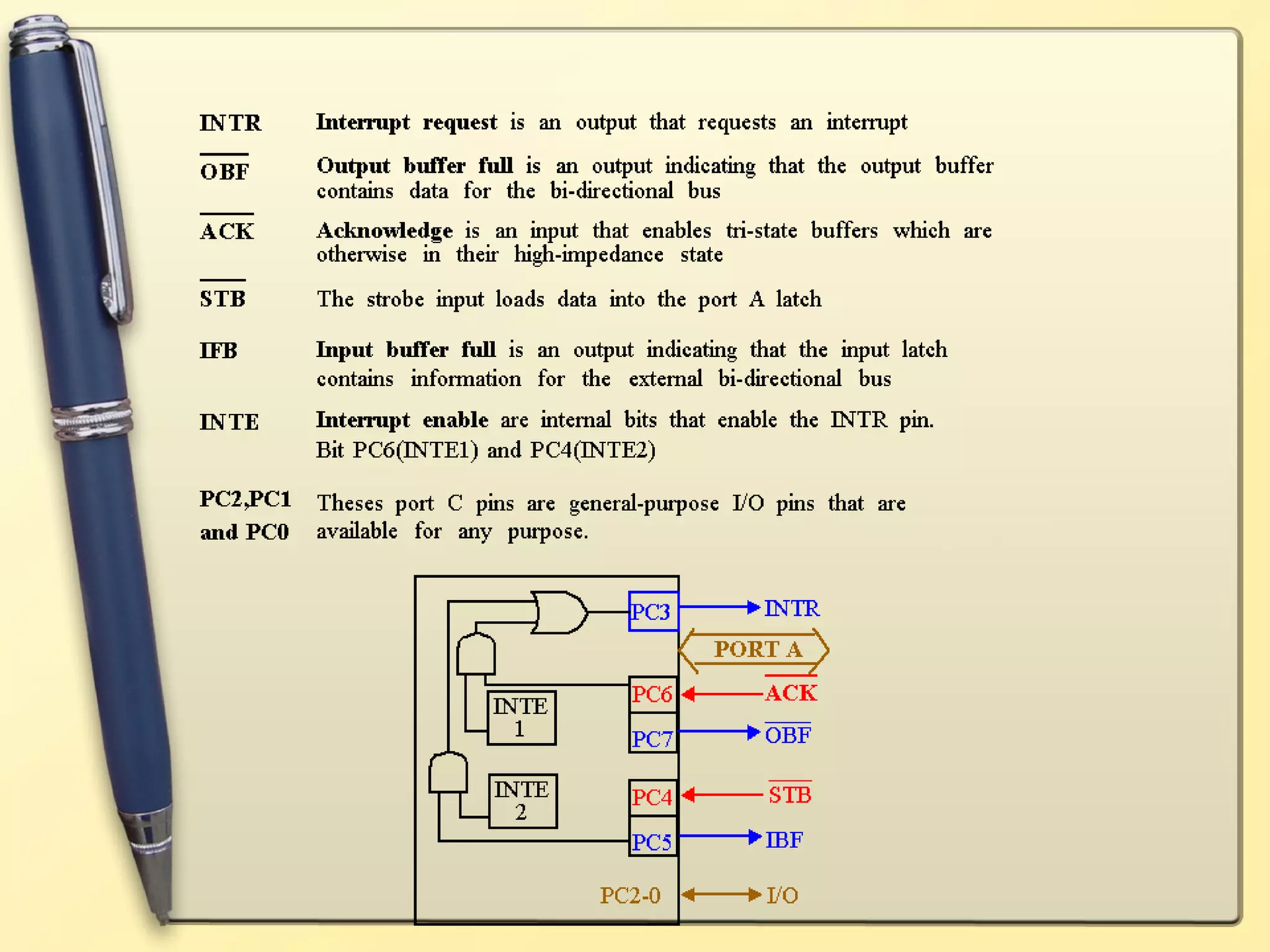
Mode 2:
— PortA is programmed to be bi-directional
— Port C is for handshaking
— Port B can be either input or output in mode 0 or mode 1
PA[7:0]
PC7 OBFA
PC6 ACKA
PC4 STBA
8255 PC5 IBFA
PC3 INTRA
PC2 In Out STBB OBFB
PC1 In Out IBFB ACKB
PC0 In Out INTRB INTRB
PB[7:0]
Mode 0 Mode 1](https://image.slidesharecdn.com/interfacingicsformicroprocessor-121211140153-phpapp01/75/Interfacing-ics-for-microprocessor-64-2048.jpg)


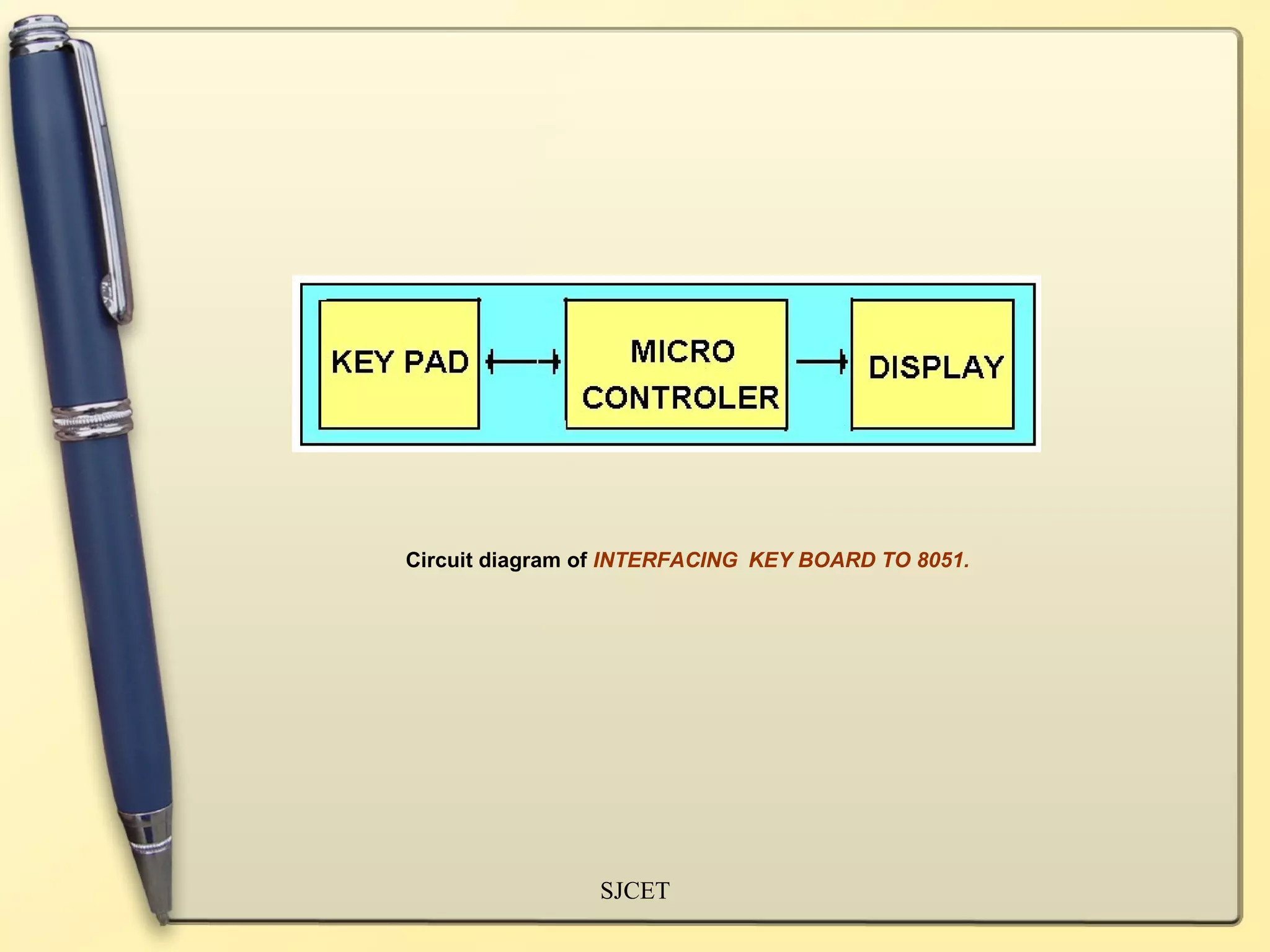
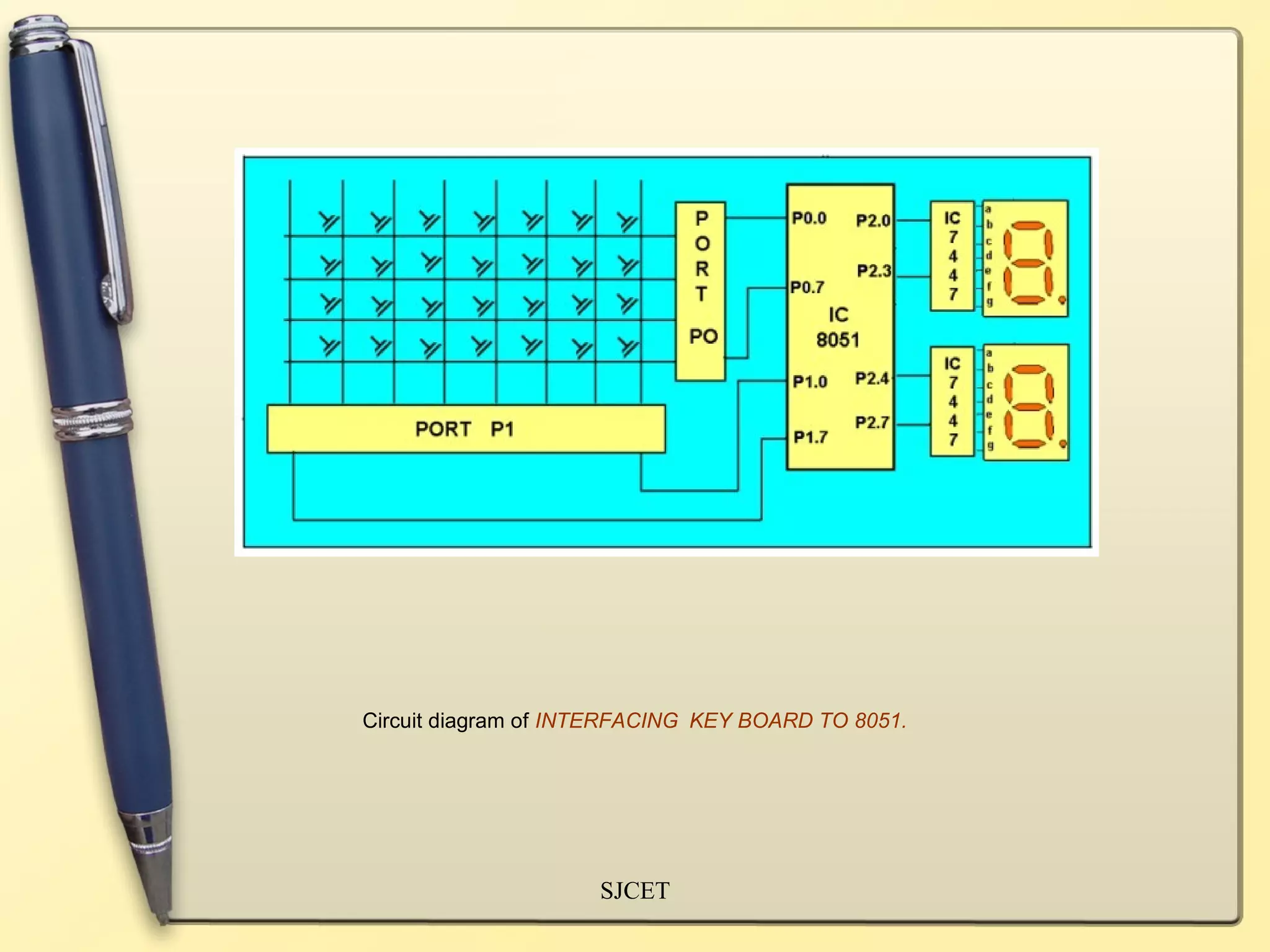
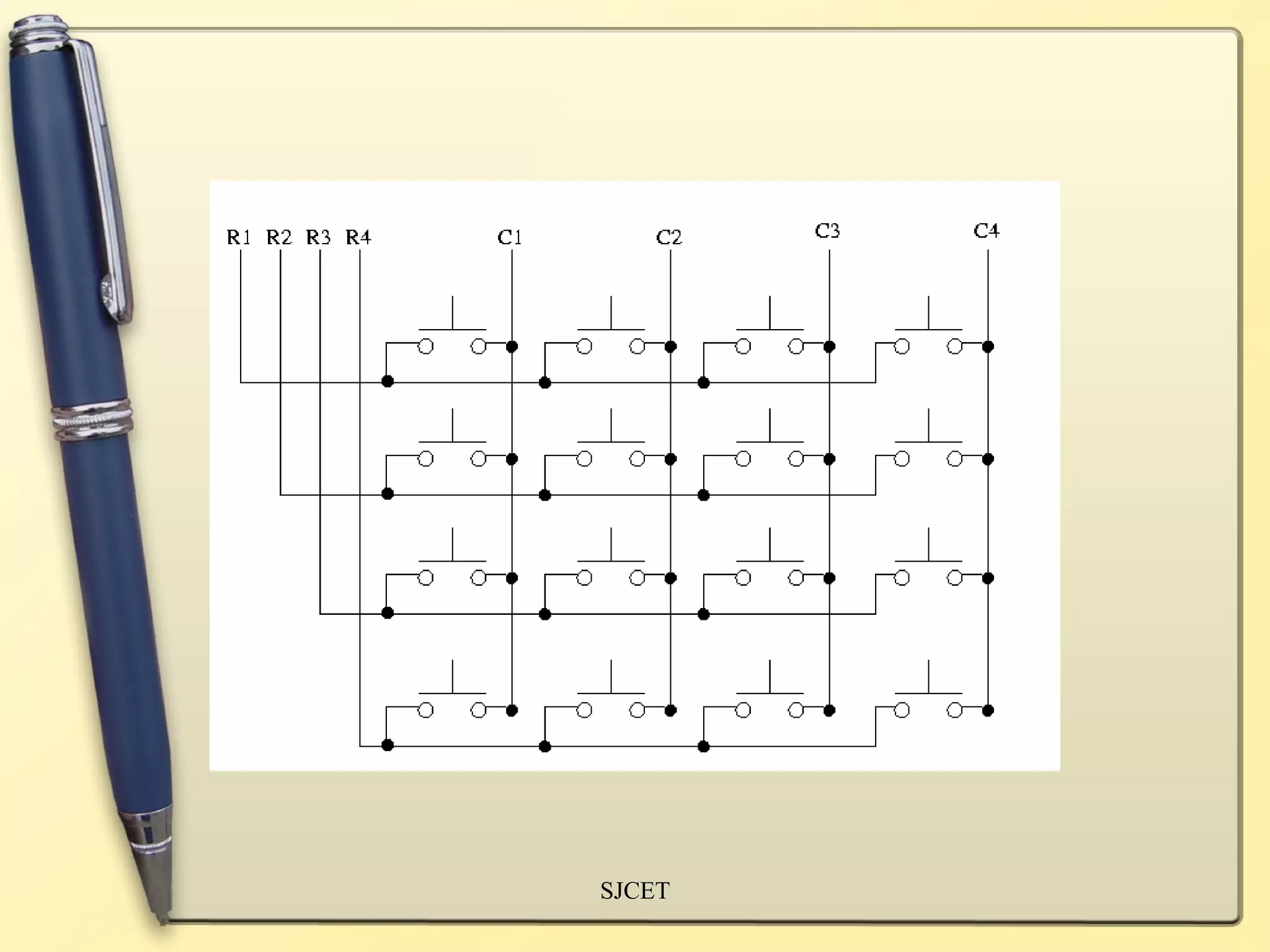
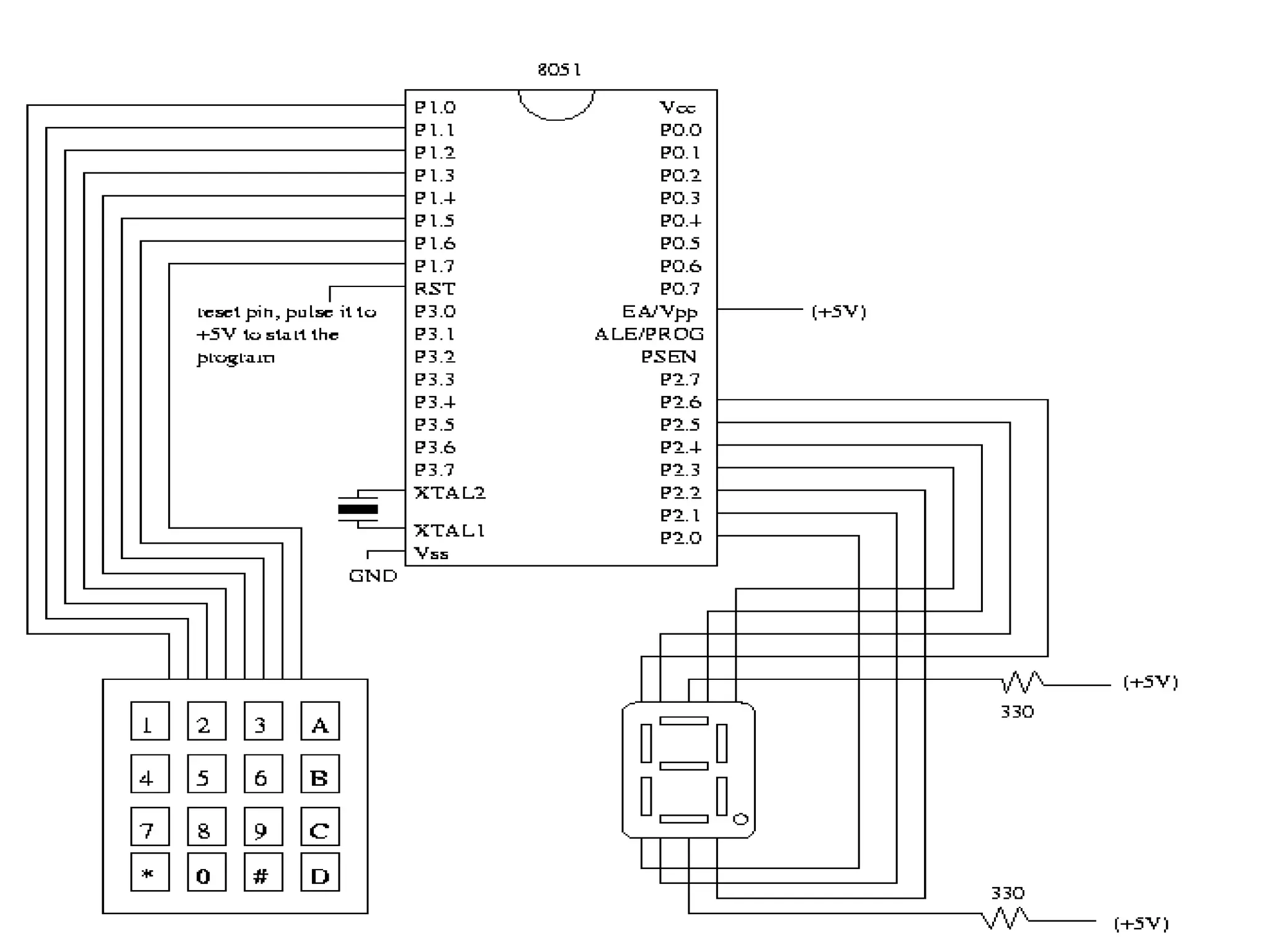
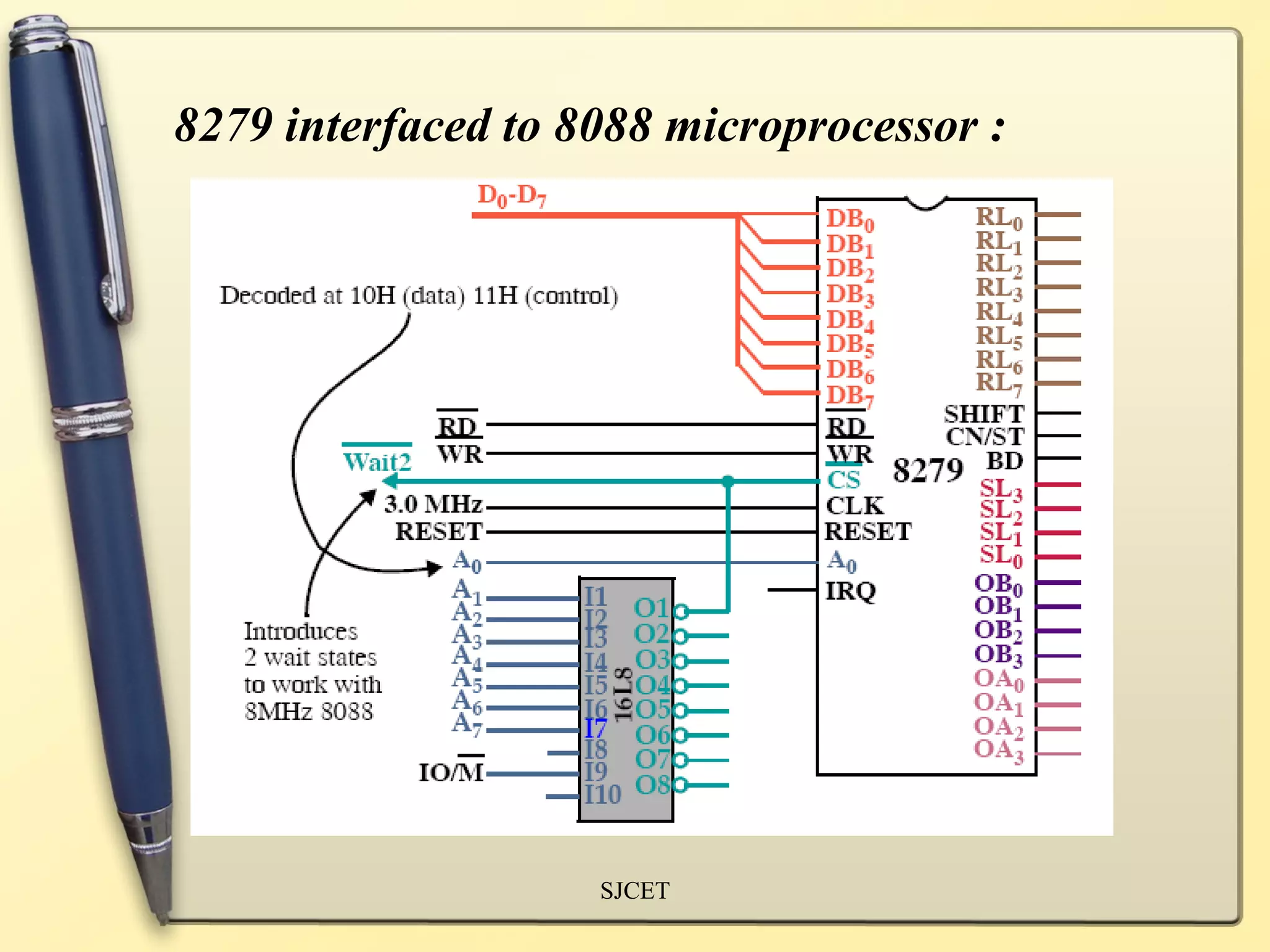
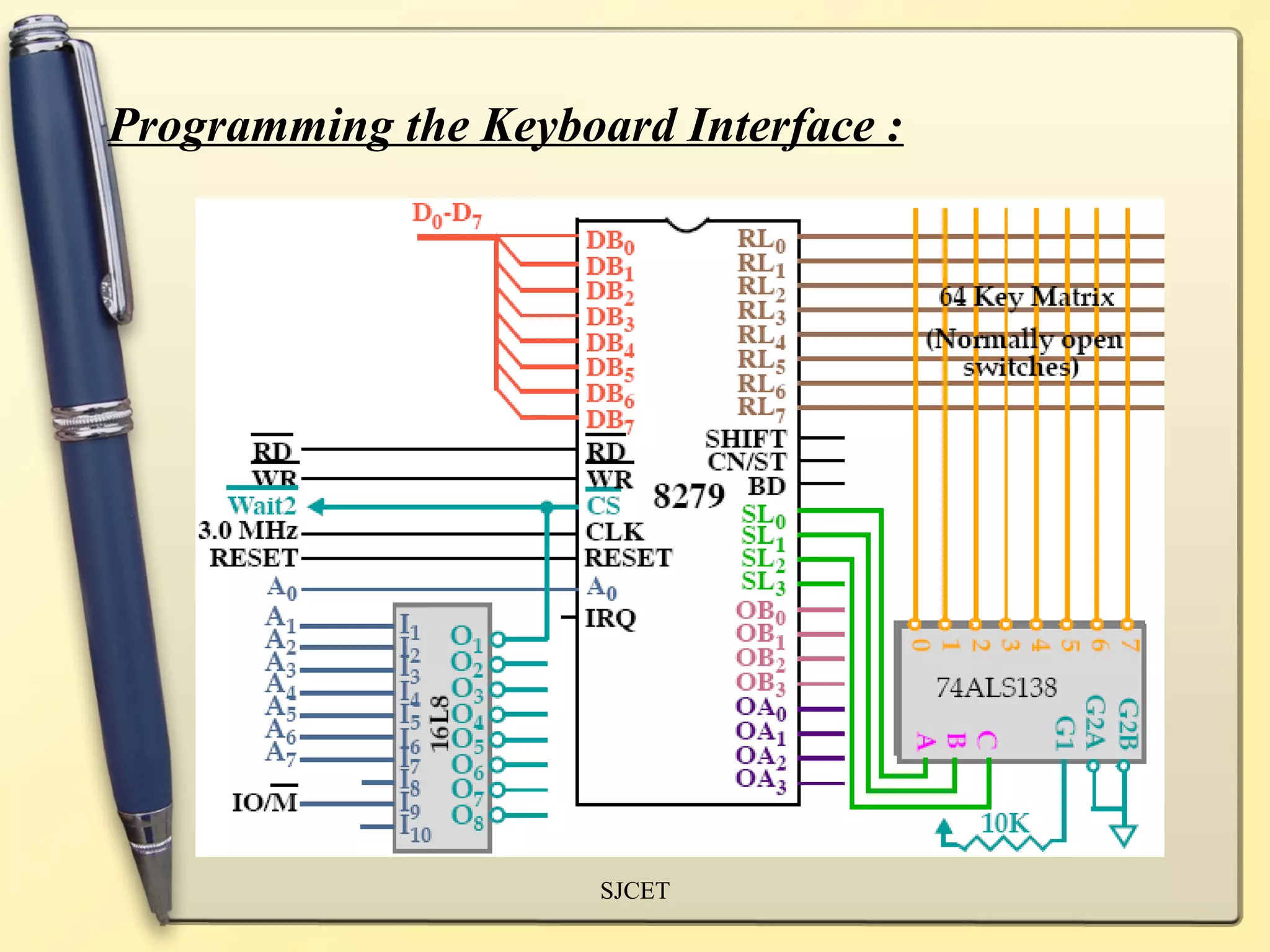
The document discusses peripherals and interfacing, specifically focusing on interfacing an I/O device like a keyboard to an 8051 microcontroller. It provides details on how the keyboard is organized in a matrix with rows and columns connected to microcontroller ports. It describes the process of scanning the rows and columns to detect key presses and identify the specific key. It includes circuit diagrams and explanations of interfacing the keyboard and displaying the pressed key on a 7-segment display.



























![Interfacing technique with 8085- ADC[0808]](https://cdn.slidesharecdn.com/ss_thumbnails/adc-160307140900-thumbnail.jpg?width=640&height=640&fit=bounds)