Download as PDF, PPTX









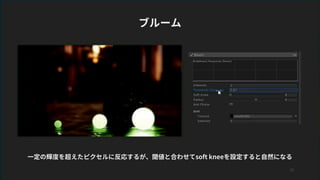
















2018/01/20に開催されたUnity道場スペシャル 2018仙台の講演スライドです。 講師:池和田 有輔(ユニティ・テクノロジーズ・ジャパン合同会社) Unityで制作した作品が、何か一味足りないと思うことはありませんか? 今回の講演ではUnity初心者を対象に、見た目を“盛る“ことができる Post Processing Stack を始めとして、気の利いた演出や視覚効果を簡単に実装するツールをご紹介します。「理屈はさておき、とりあえずコレやっとけば良い感じになる」「応用はさておき、○○を実現するためにはコレが最短ルート」というお手軽なクオリティアップを望むのであればきっと助けになるでしょう。 紹介予定アセット PostProcessing Stack / TextMesh Pro / Unity Particle Pack / Shader Forge など こんな人にオススメ ・Post Processing Stackを使ったことがないアーティスト、Unityユーザー全般 ・学校や個人で小規模なゲームを作る方 得られる知見 ・Post Processing Stackでできるビジュアル表現 ・デザイン便利ツールと使用テクニック Unityのイベント資料はこちらから: https://www.slideshare.net/UnityTechnologiesJapan/clipboards









![[UE4]自動テストでもっと楽したい!](https://cdn.slidesharecdn.com/ss_thumbnails/ue4automationtest-190527101956-thumbnail.jpg?width=640&height=640&fit=bounds)





































