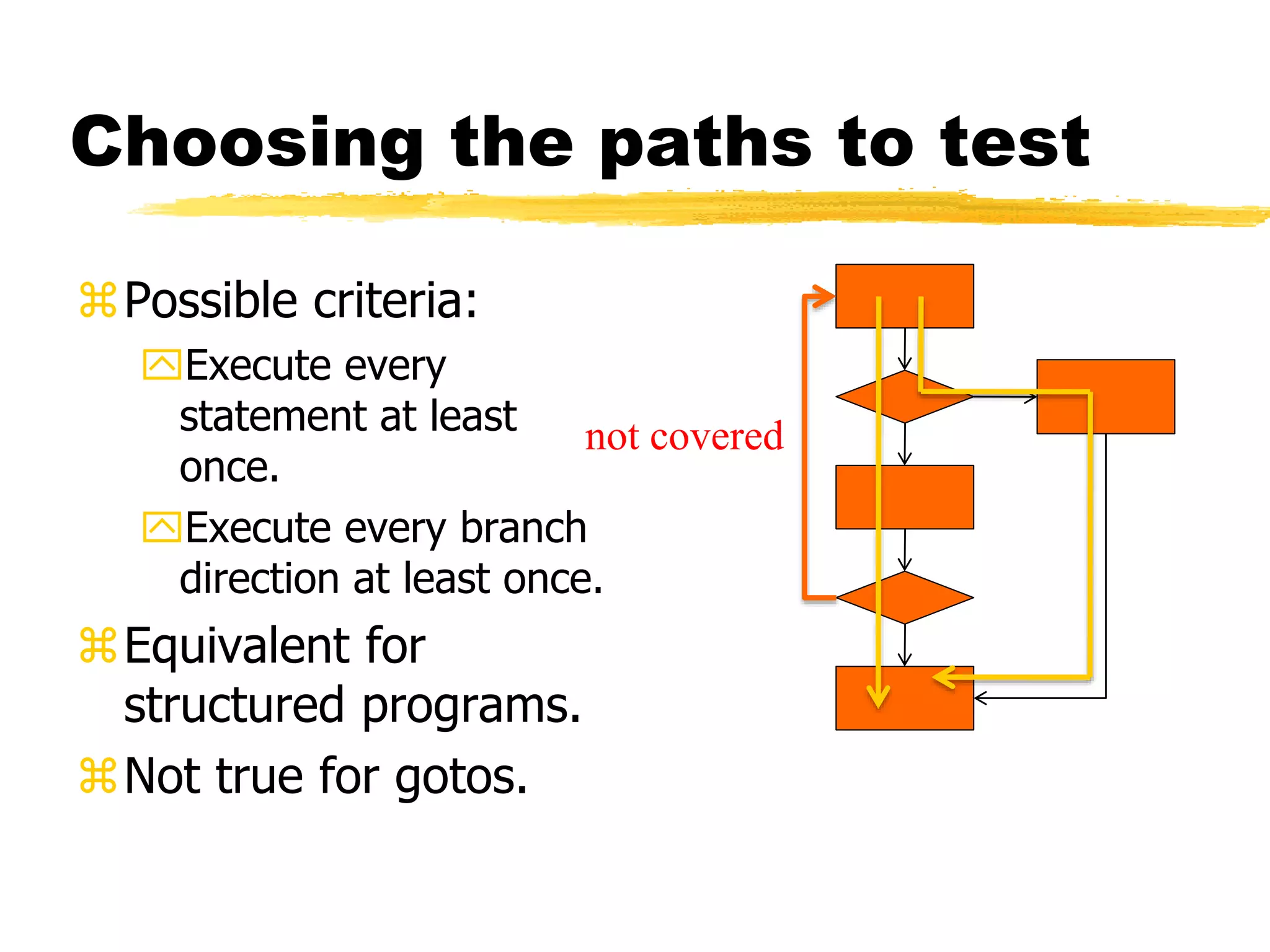
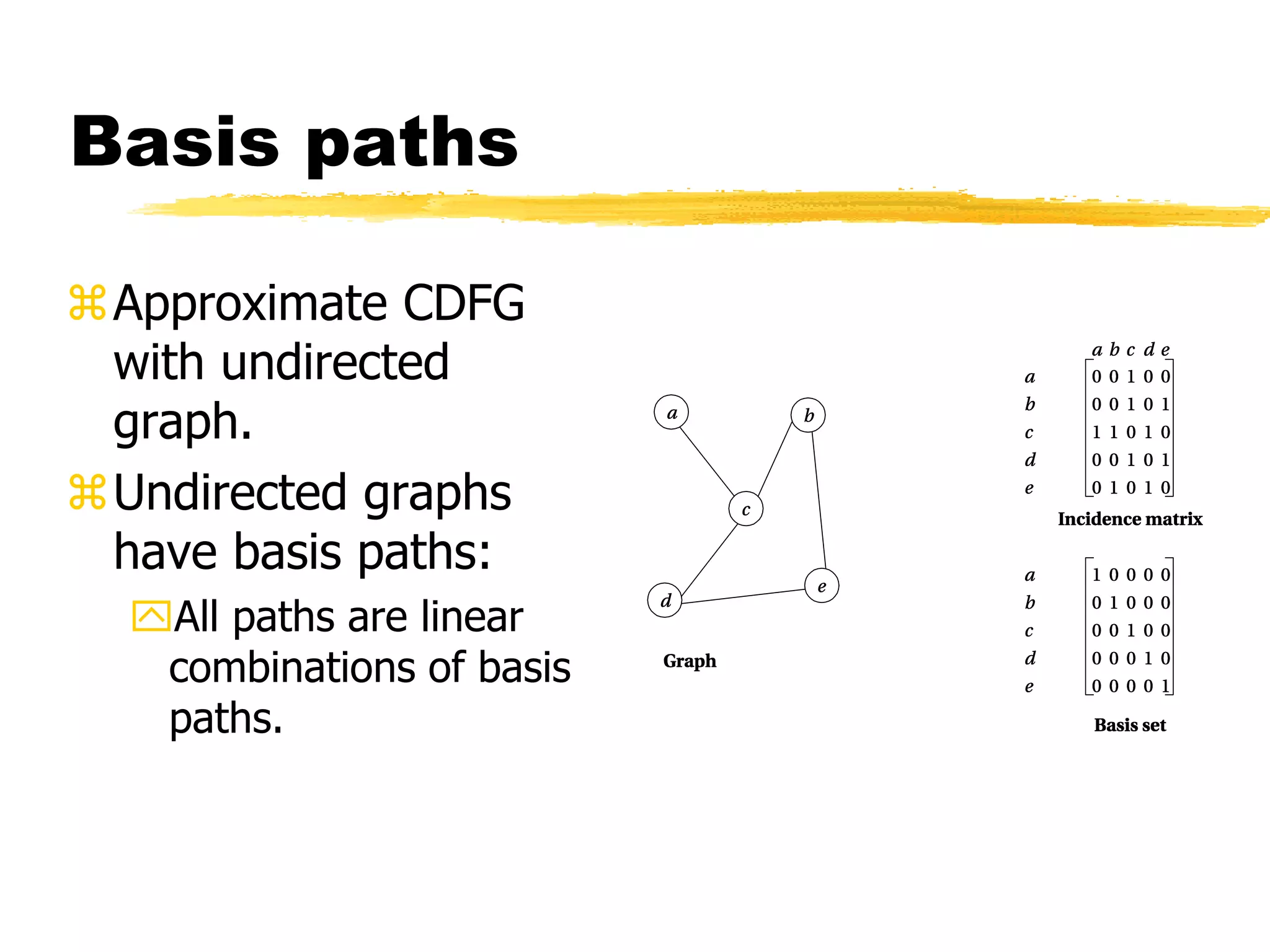
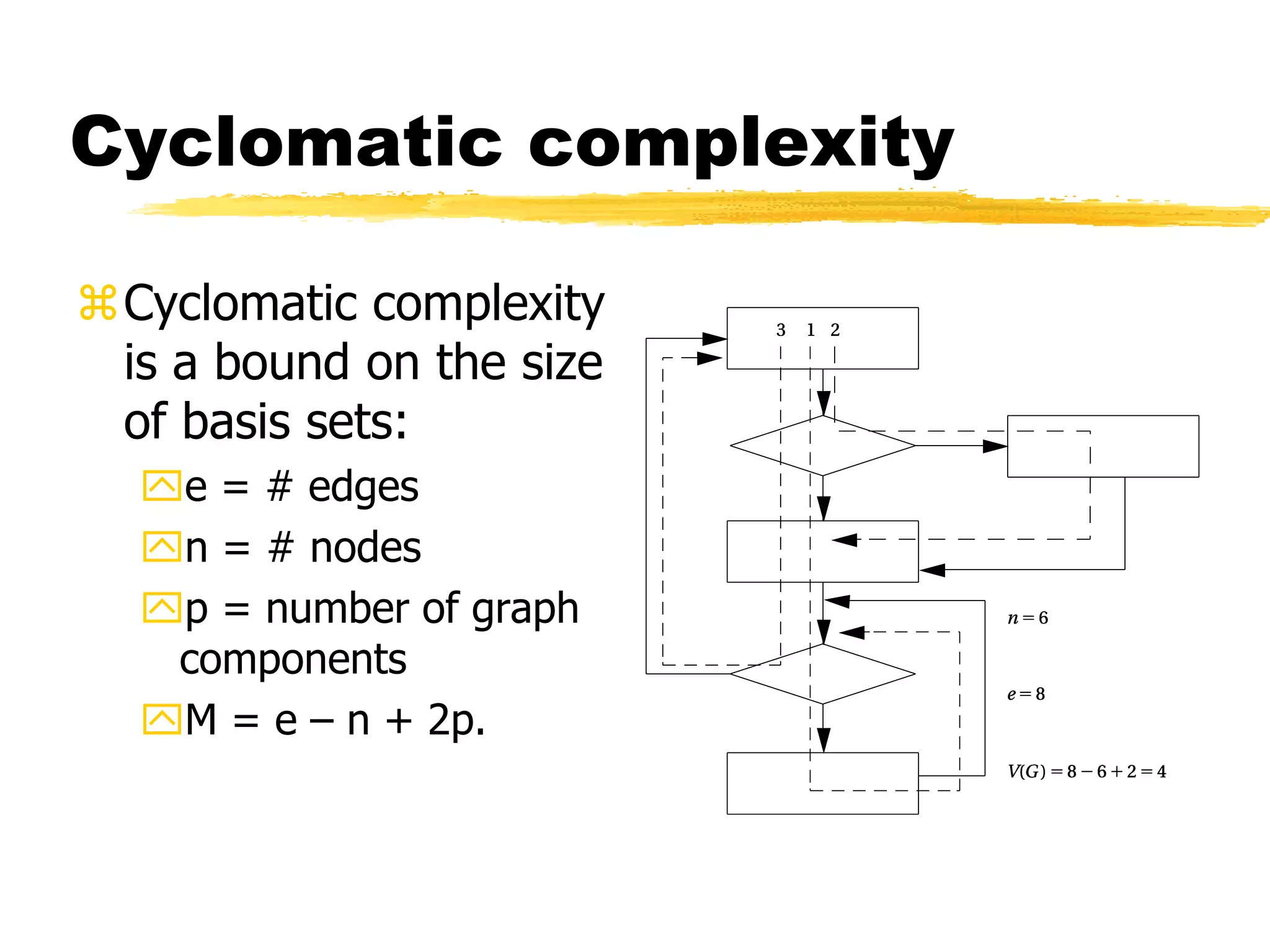
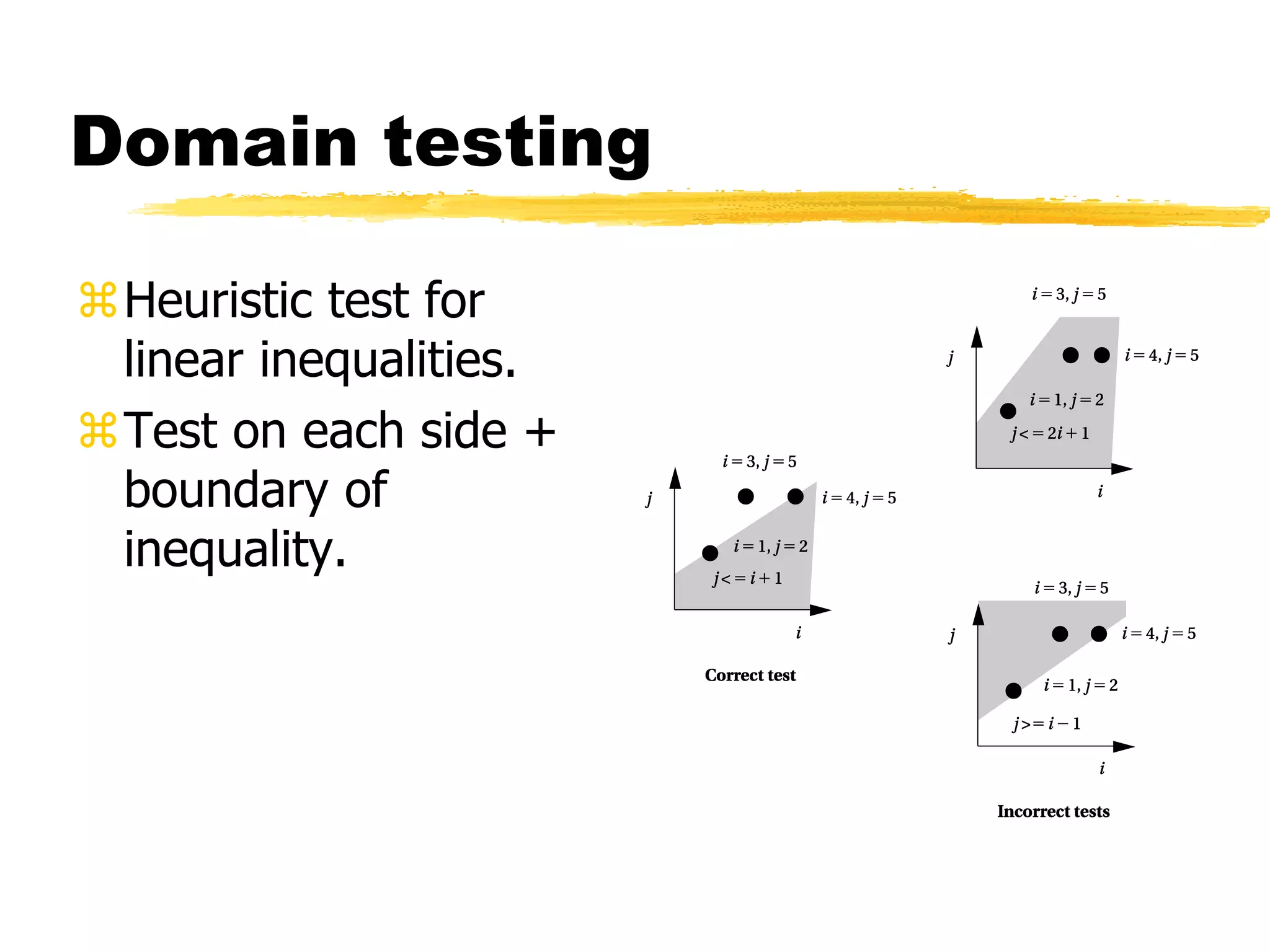
The document discusses program design and analysis, focusing on performance metrics such as execution time, energy consumption, and program size optimization. It emphasizes the importance of measuring program performance through simulation and profiling while presenting various techniques for improving execution speed and managing cache behavior. Additionally, it covers program validation and testing methodologies including black-box and clear-box testing, highlighting the significance of testing execution paths and ensuring functional verification.
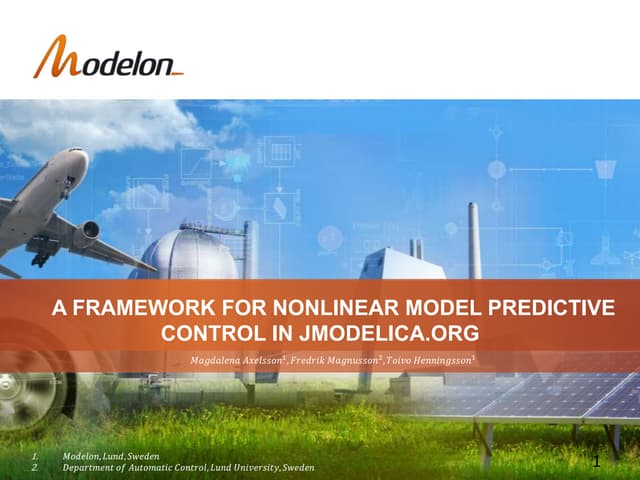
![Paths in a loop
for (i=0, f=0; i<N; i++)
f = f + c[i] * x[i];
i=0
f=0
i=N
f = f + c[i] * x[i]
i = i + 1
N
Y](https://image.slidesharecdn.com/unit3part2-200903161624/75/Unit-3-part2-9-2048.jpg)
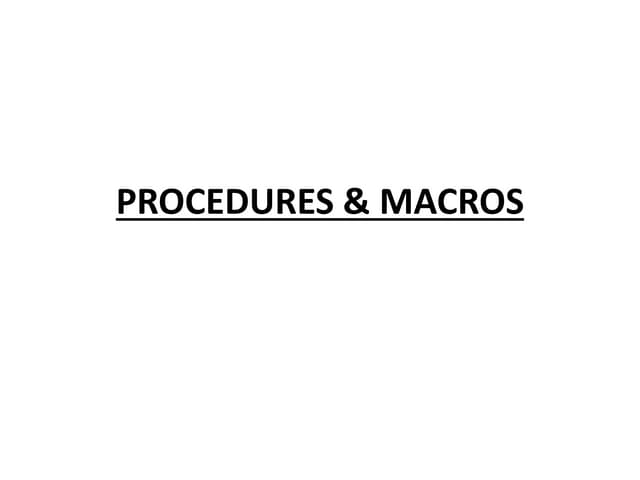
![Code motion
BEFORE OPTIMIZATION
for (i=0, f=0; i<N; i++)
{
x=y+z;
a[i]=6*i;
}
AFTER OPTIMIZATION
x=y+z;
for (i=0, f=0; i<N; i++)
{
a[i]=6*I;
}](https://image.slidesharecdn.com/unit3part2-200903161624/75/Unit-3-part2-18-2048.jpg)
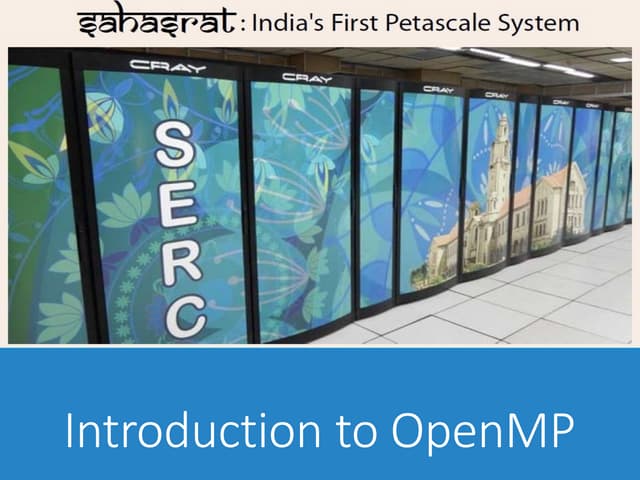
![Induction variable
elimination (nested loop)
BEFORE OPTIMIZATION
for (i=0; i<N; i++)
{
for (j=0; j<M; j++)
{
z[i] [j]= b[i] [j];
}
}
AFTER OPTIMIZATION
for (i=0; i<N; i++)
for (j=0; j<M; j++)
{
Zbinduct = i*M+j;
*(Zptr+Zbinduct)=*(bptr+
Z binduct);
}](https://image.slidesharecdn.com/unit3part2-200903161624/75/Unit-3-part2-19-2048.jpg)
![Array conflicts in cache
a[0,0]
b[0,0]
main memory cache
1024 4099
...
1024
4099](https://image.slidesharecdn.com/unit3part2-200903161624/75/Unit-3-part2-22-2048.jpg)





![[Capella Day 2019] Model execution and system simulation in Capella](https://cdn.slidesharecdn.com/ss_thumbnails/modelexecutionandsystemsimulationincapellav1-191001130117-thumbnail.jpg?width=640&height=640&fit=bounds)