The document discusses various topics in three dimensional geometry, including:
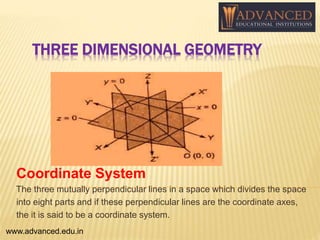
1. Coordinate systems define three perpendicular coordinate axes dividing space into eight parts.
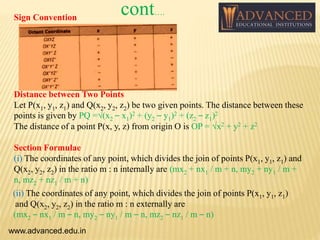
2. The distance between two points P and Q is calculated as the square root of the sum of the squares of the differences between their x, y, and z coordinates.
3. Section formulae give the coordinates of points dividing or projecting onto lines between two given points.