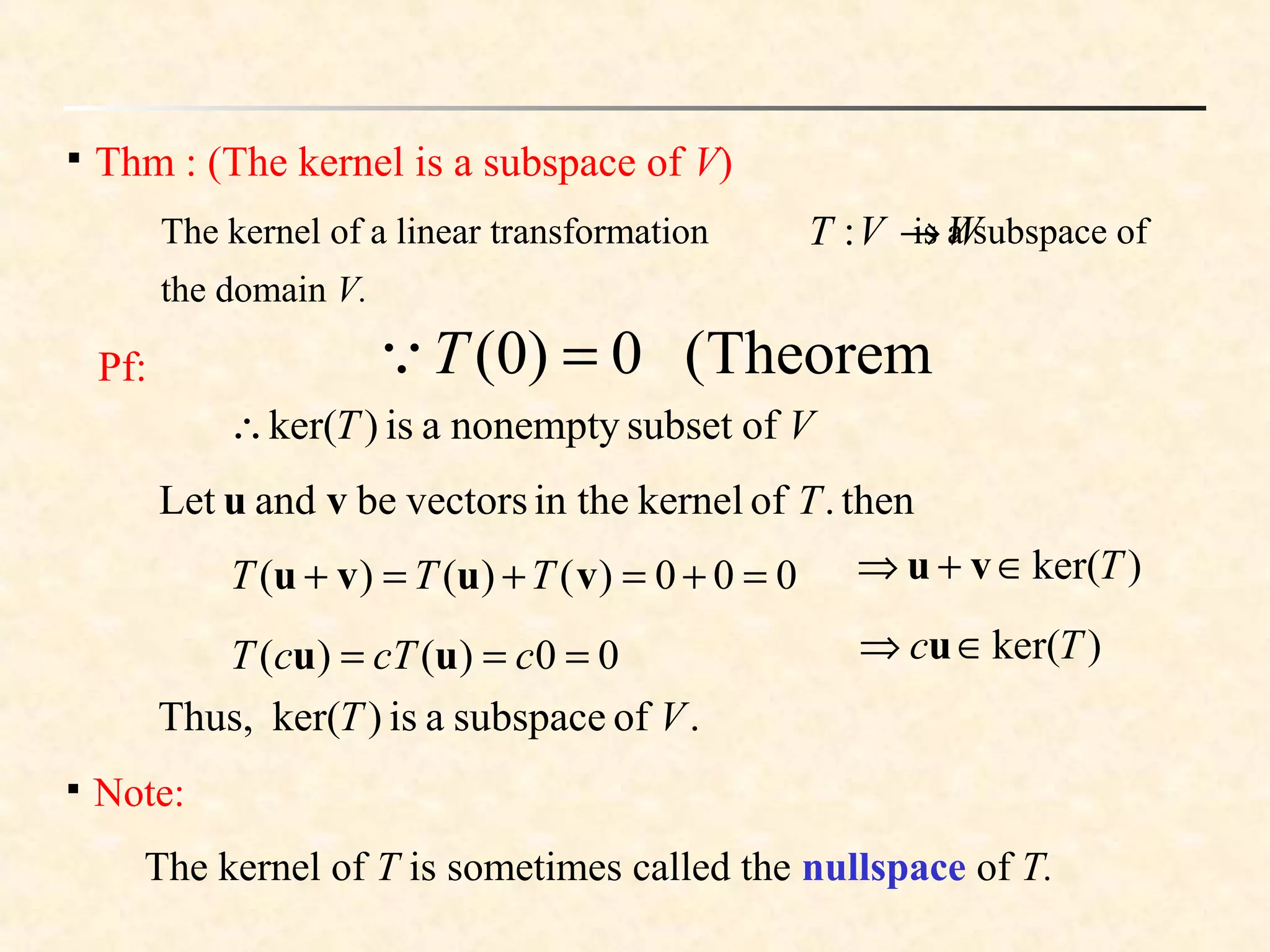
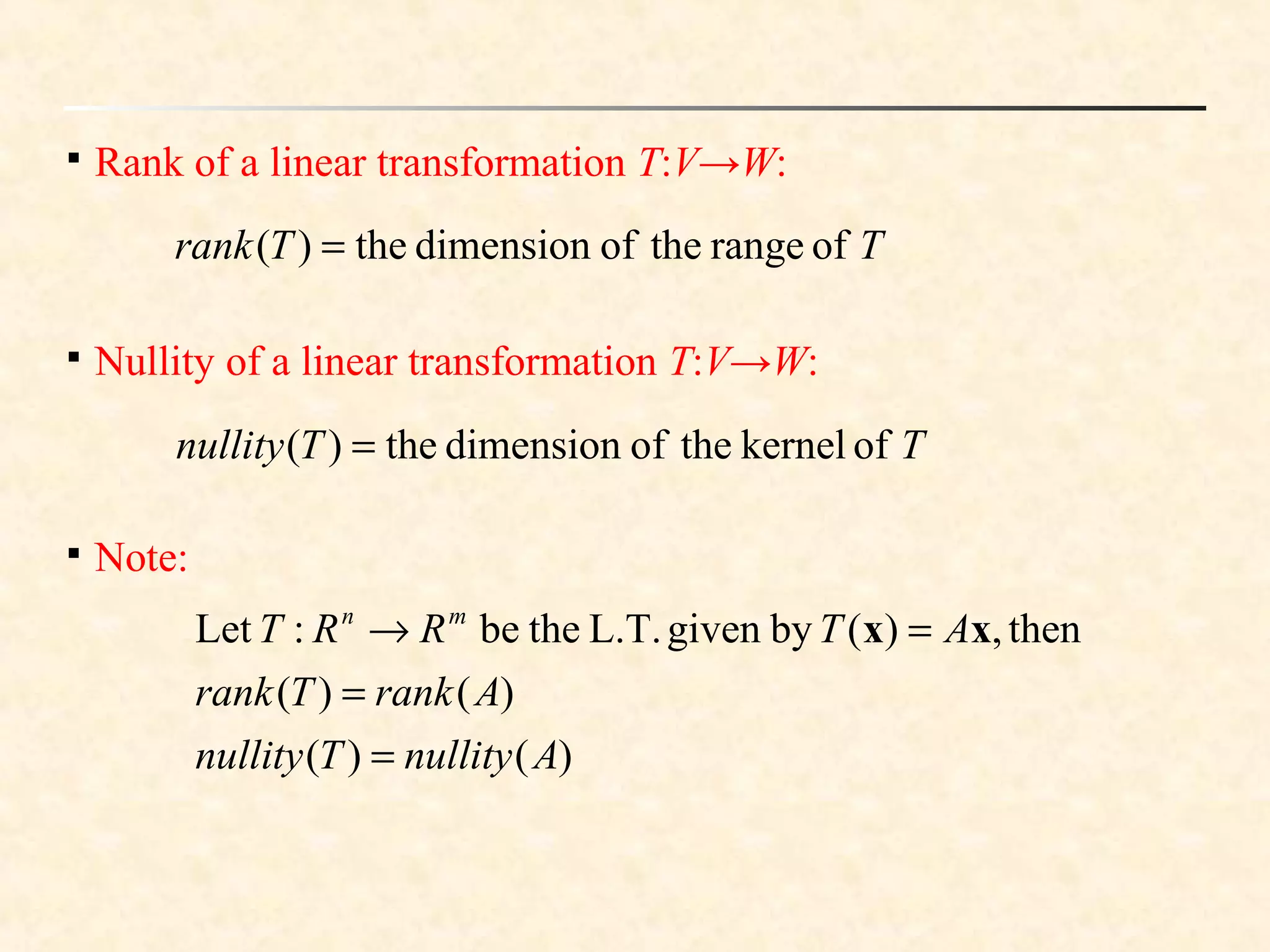
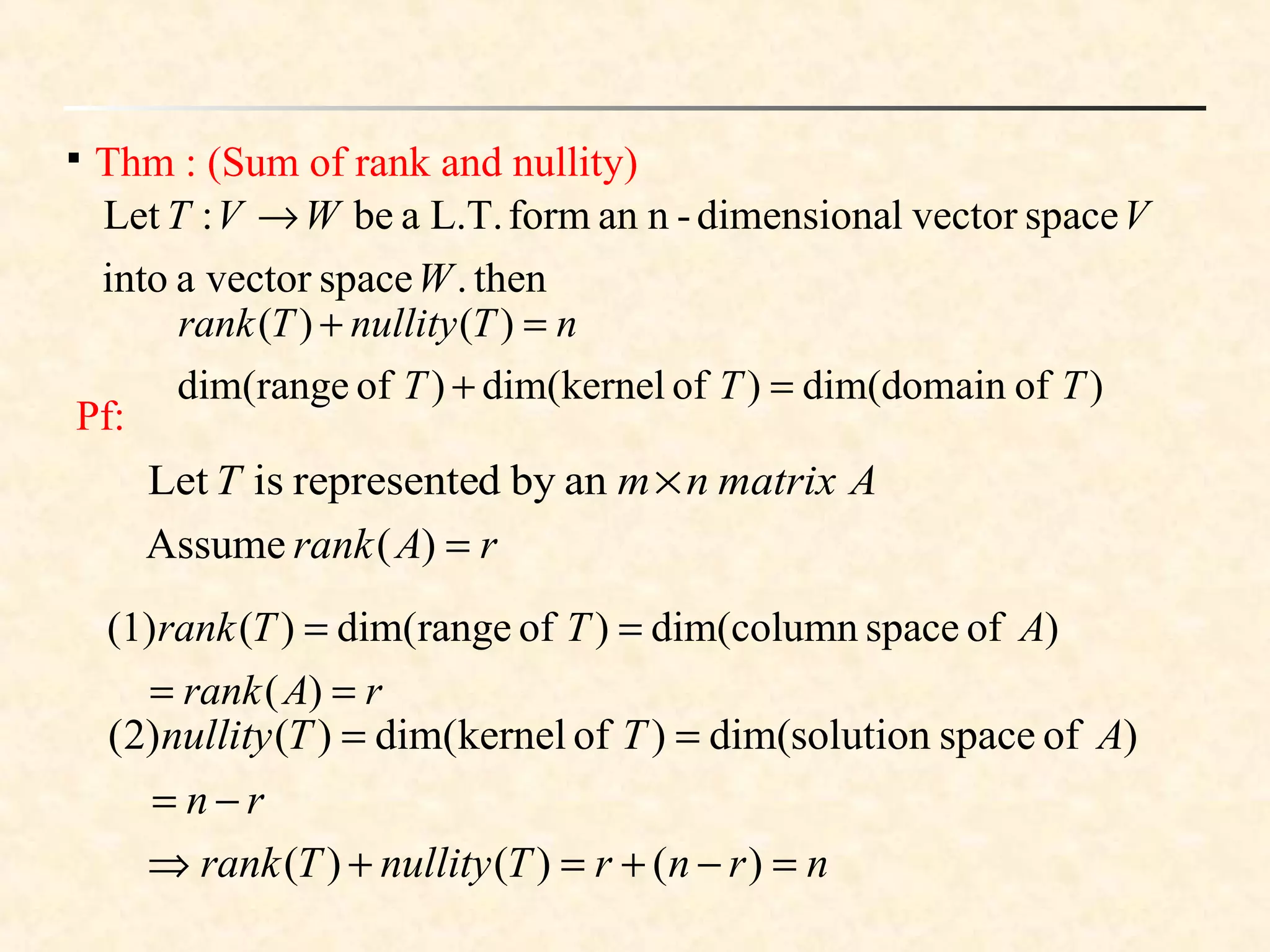
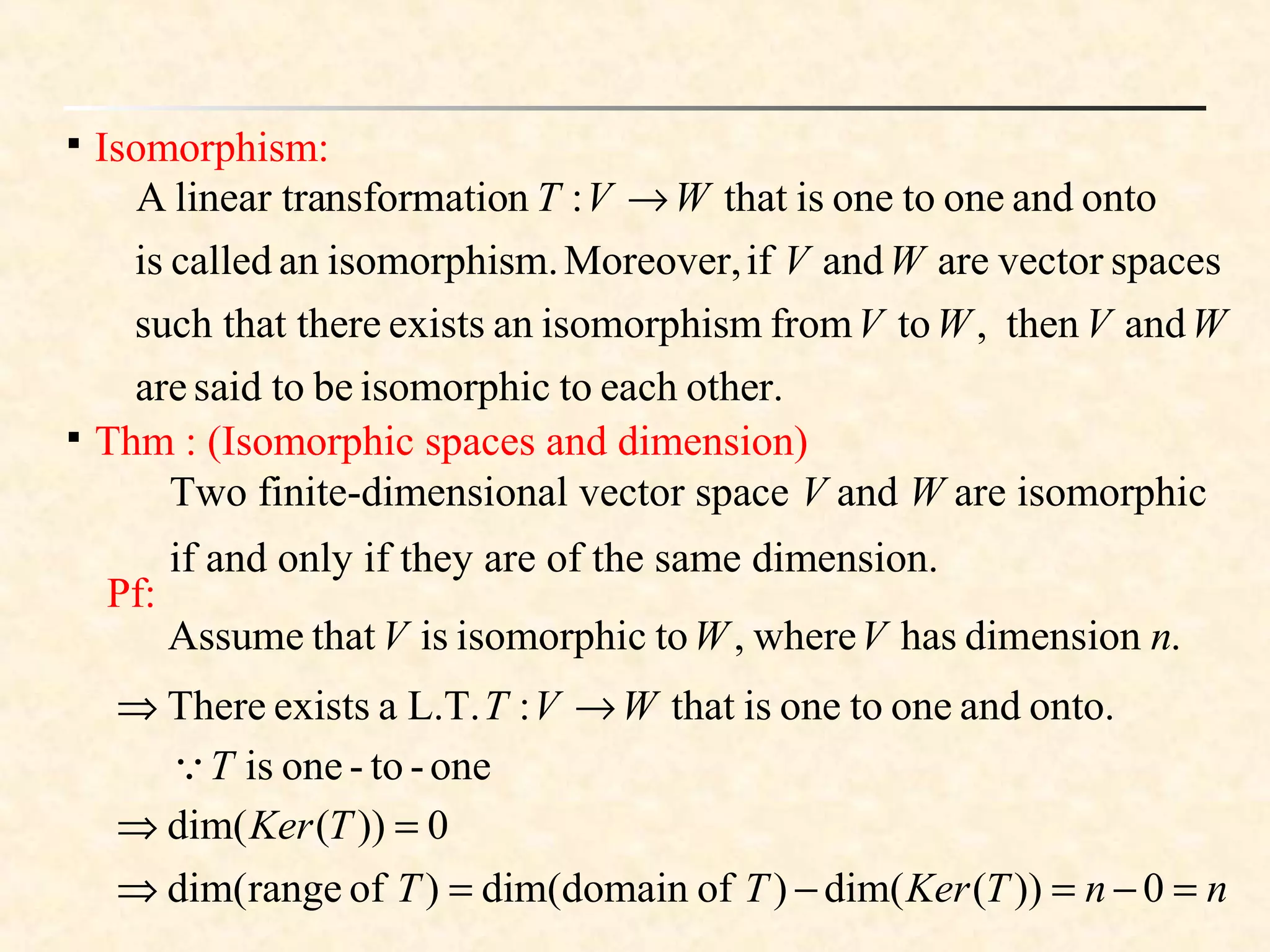
The document provides a comprehensive introduction to linear transformations, including their definitions, properties, kernels, ranges, and matrices associated with them. It also covers concepts like isomorphism, rank, nullity, and the relationship between linear transformations and matrices. Examples throughout the document illustrate these concepts in detail, aiding in understanding the mathematical principles involved.

![
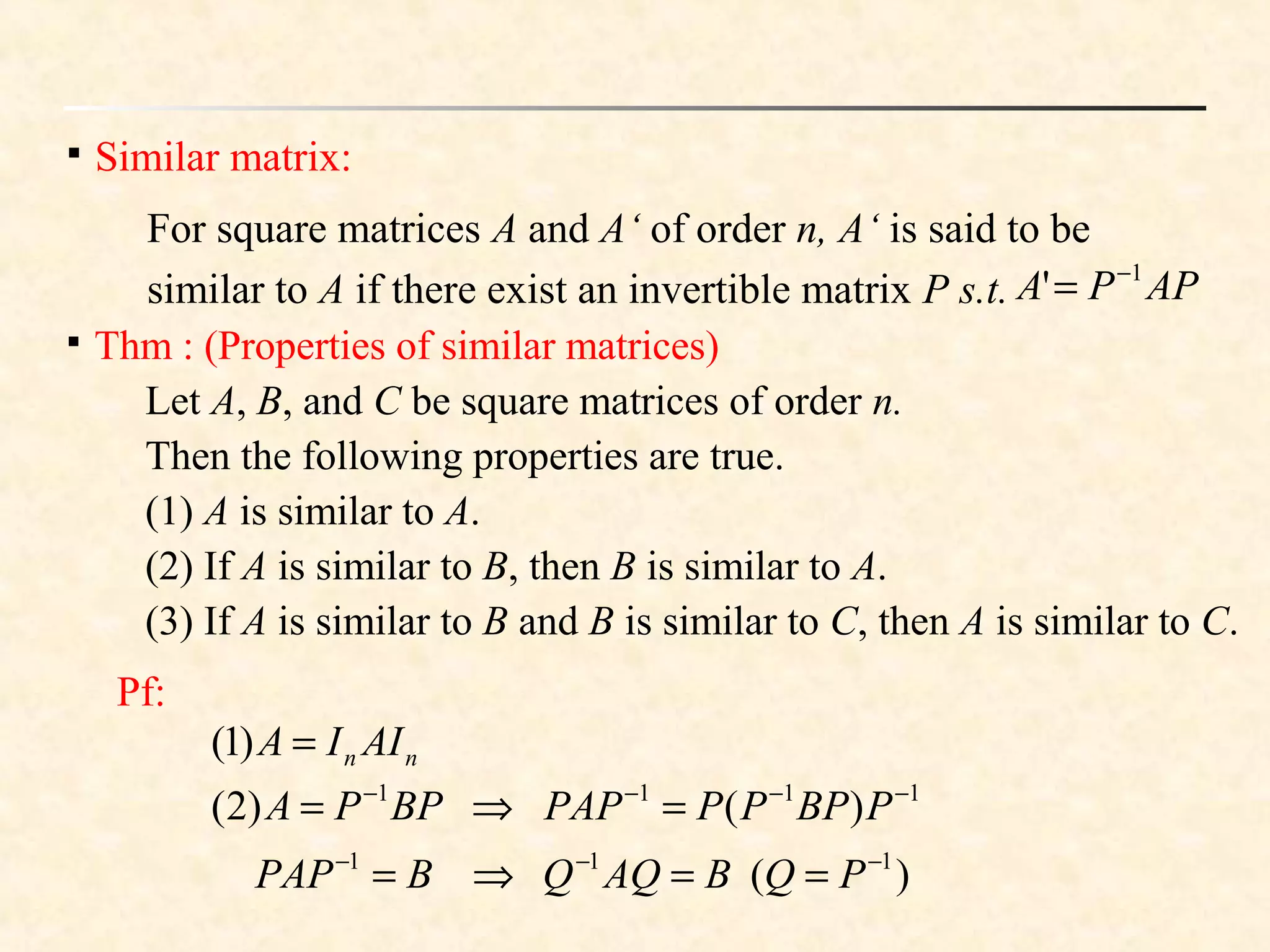
Thm : (Standard matrix for a linear transformation)
such thatonansformatilinear trtabe:Let mn
RRT →
,)(,,)(,)( 2
1
2
22
12
2
1
21
11
1
=
=
=
mn
n
n
n
mm a
a
a
eT
a
a
a
eT
a
a
a
eT
)(tocorrespondcolumnssematrix whoThen the i
eTnnm×
.formatrixstandardthecalledisA
.ineveryfor)(such thatis
T
RAT n
vvv =
[ ]
==
mnmm
n
n
n
aaa
aaa
aaa
eTeTeTA
21
22221
11211
21 )()()(](https://image.slidesharecdn.com/vclappt-160330153047/75/linear-transformation-19-2048.jpg)
![
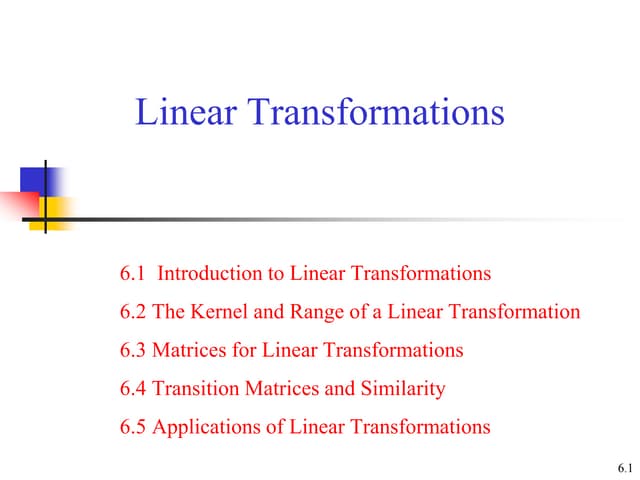
the matrix of T relative to the bases B and B':
)forbasis(a},,,{'
)forbasis(a},,,{
)L.T.a(:
21
21
WwwwB
VvvvB
WVT
m
n
=
=
→
Thus, the matrix of T relative to the bases B and B' is
[ ] [ ] [ ][ ] nmBnBB
MvTvTvTA ×∈= ''2'1 )(,,)(,)( ](https://image.slidesharecdn.com/vclappt-160330153047/75/linear-transformation-23-2048.jpg)
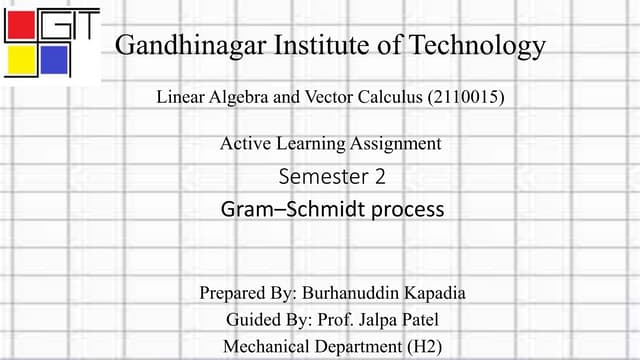
![Transition Matrices and Similarity
)ofbasis(a},,,{'
)ofbasisa(},,,{
)L.T.a(:
21
21
VwwwB
VvvvB
VVT
n
n
=
=
→
[ ] [ ] [ ][ ] )torelativeofmatrix()(,,)(,)( 21 BTvTvTvTA BnBB
=
[ ] [ ] [ ][ ] )'torelativeof(matrix)(,,)(,)(' ''2'1 BTwTwTwTA BnBB
=
[ ] [ ] [ ][ ] )to'frommatrixntransitio(,,, 21 BBwwwP BnBB
=
[ ] [ ] [ ][ ] )'tofrommatrixntransitio(,,, ''2'1
1
BBvvvP BnBB
=−
[ ] [ ] [ ] [ ]BBBB PP vvvv 1
'', −
==∴
[ ] [ ]
[ ] [ ] '' ')(
)(
BB
BB
AT
AT
vv
vv
=
=](https://image.slidesharecdn.com/vclappt-160330153047/75/linear-transformation-24-2048.jpg)
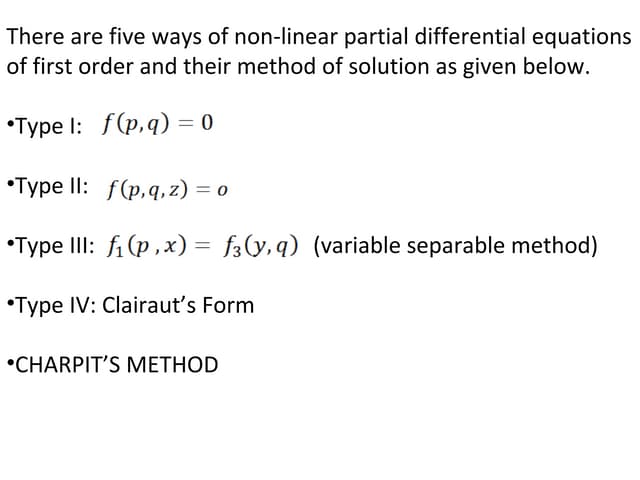
direct)(1(
BB TA vv =
[ ] 'Bv [ ] ')( BT v
''
1
)]([][
(indirect))2(
BB TAPP vv =−
APPA 1
' −
=⇒
direct
indirect](https://image.slidesharecdn.com/vclappt-160330153047/75/linear-transformation-25-2048.jpg)