Downloaded 208 times


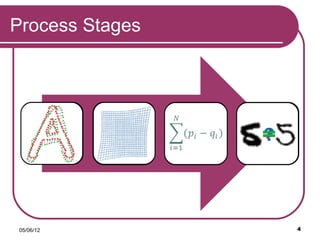

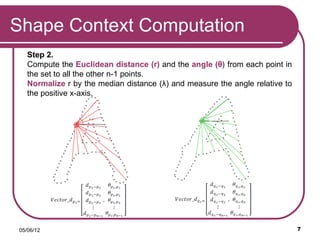
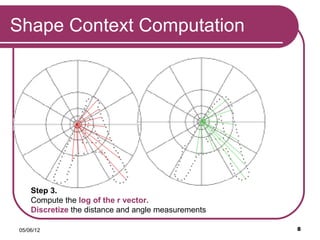
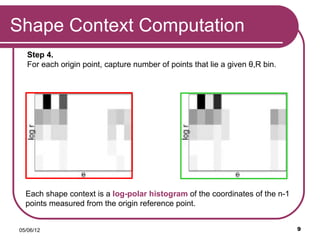

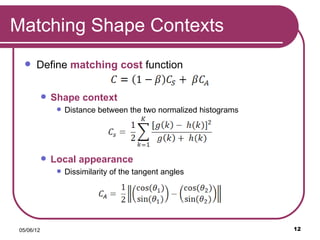
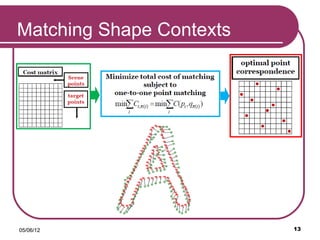







The document discusses the Shape Context method for measuring similarities between shapes, focusing on its algorithm for object classification and recognition. It outlines the process stages, computation steps, and applications such as digit recognition and silhouette retrieval. The method is noted for its invariance to translation, scale, and rotation, making it a valuable tool for shape matching.







![[DL輪読会]End-to-end Recovery of Human Shape and Pose](https://cdn.slidesharecdn.com/ss_thumbnails/end2endrecoveryofhumanshapeandpose-180112002454-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)](https://cdn.slidesharecdn.com/ss_thumbnails/os3-01-210605061816-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DLHacks 実装] DeepPose: Human Pose Estimation via Deep Neural Networks](https://cdn.slidesharecdn.com/ss_thumbnails/20170821onodeepposepresentation-170928100207-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)
















![[Mmlab seminar 2016] deep learning for human pose estimation](https://cdn.slidesharecdn.com/ss_thumbnails/mucdgsomrcs8cgkh9gsp-signature-54f17826ed7e29e13653ed835b10fabd79d8e26ac84412798c7e96ef7d109006-poli-160811023645-thumbnail.jpg?width=640&height=640&fit=bounds)