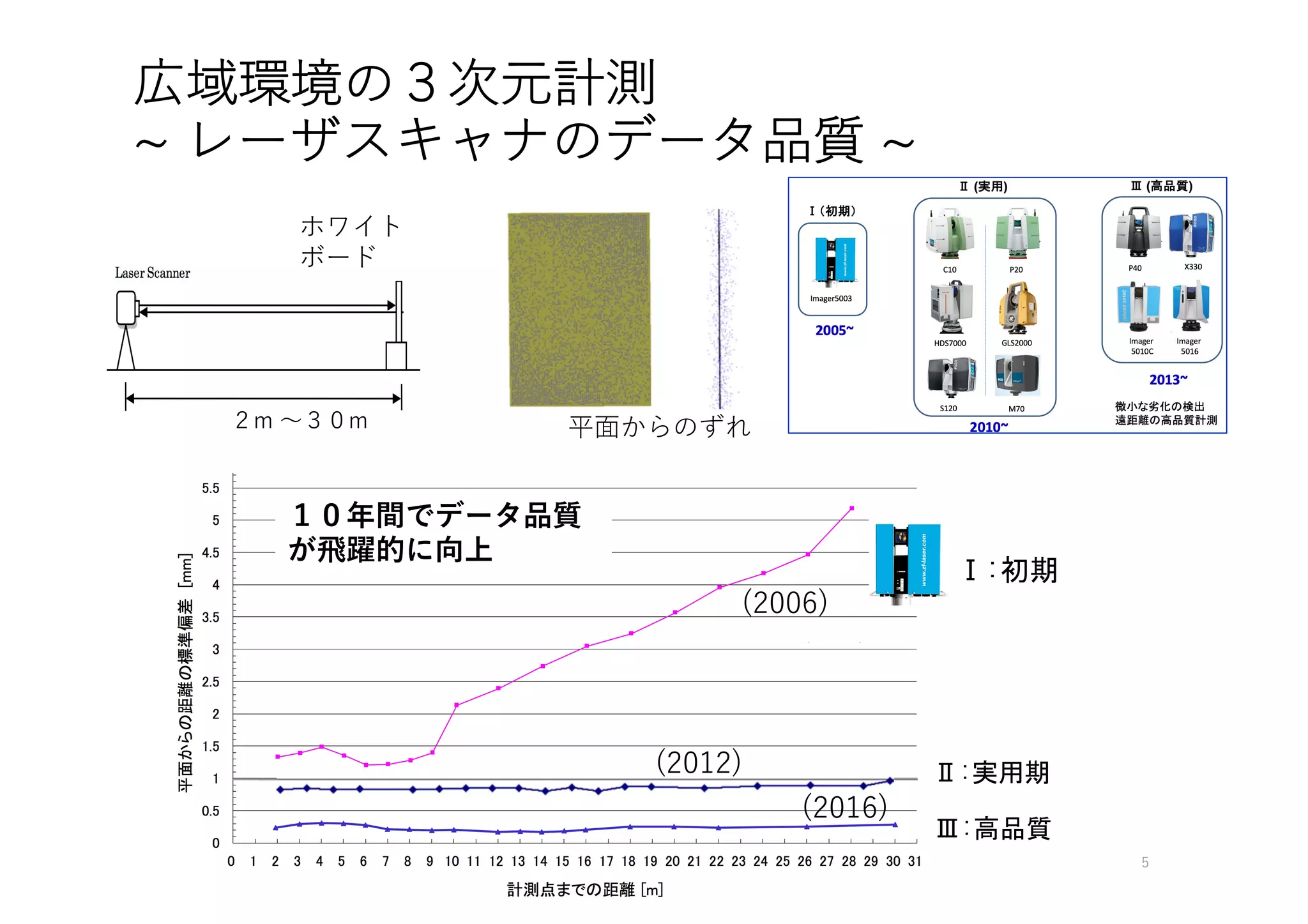
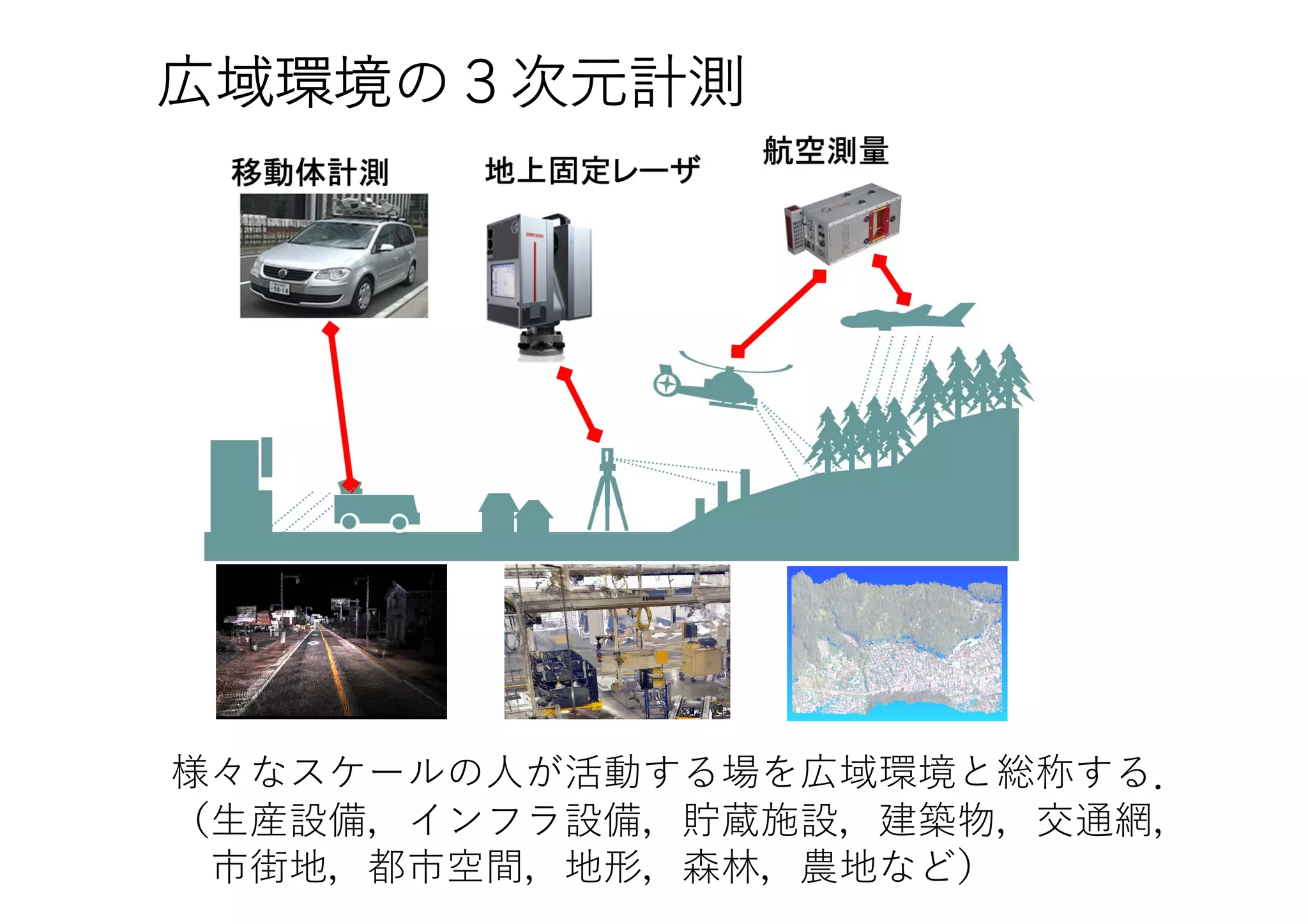
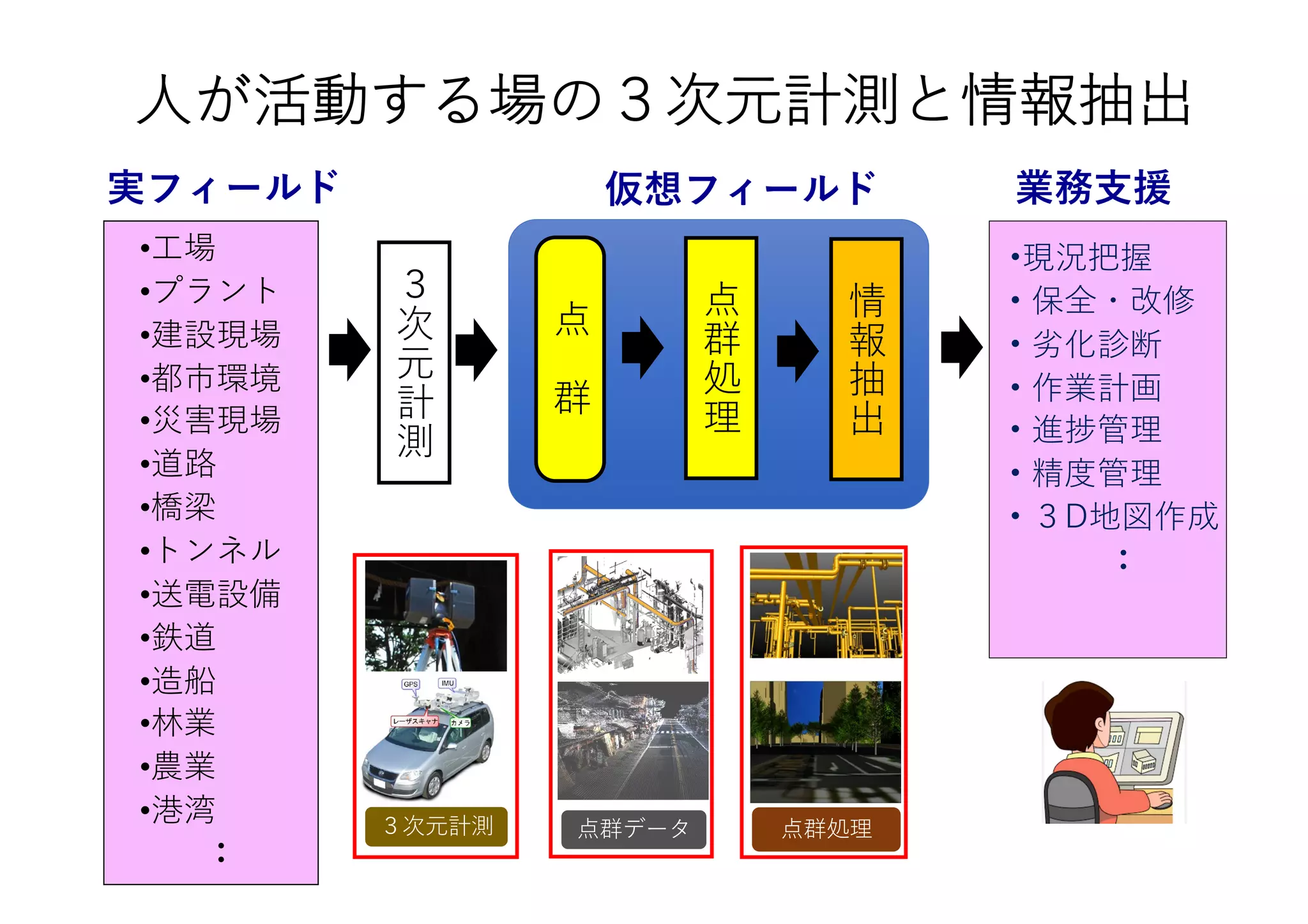
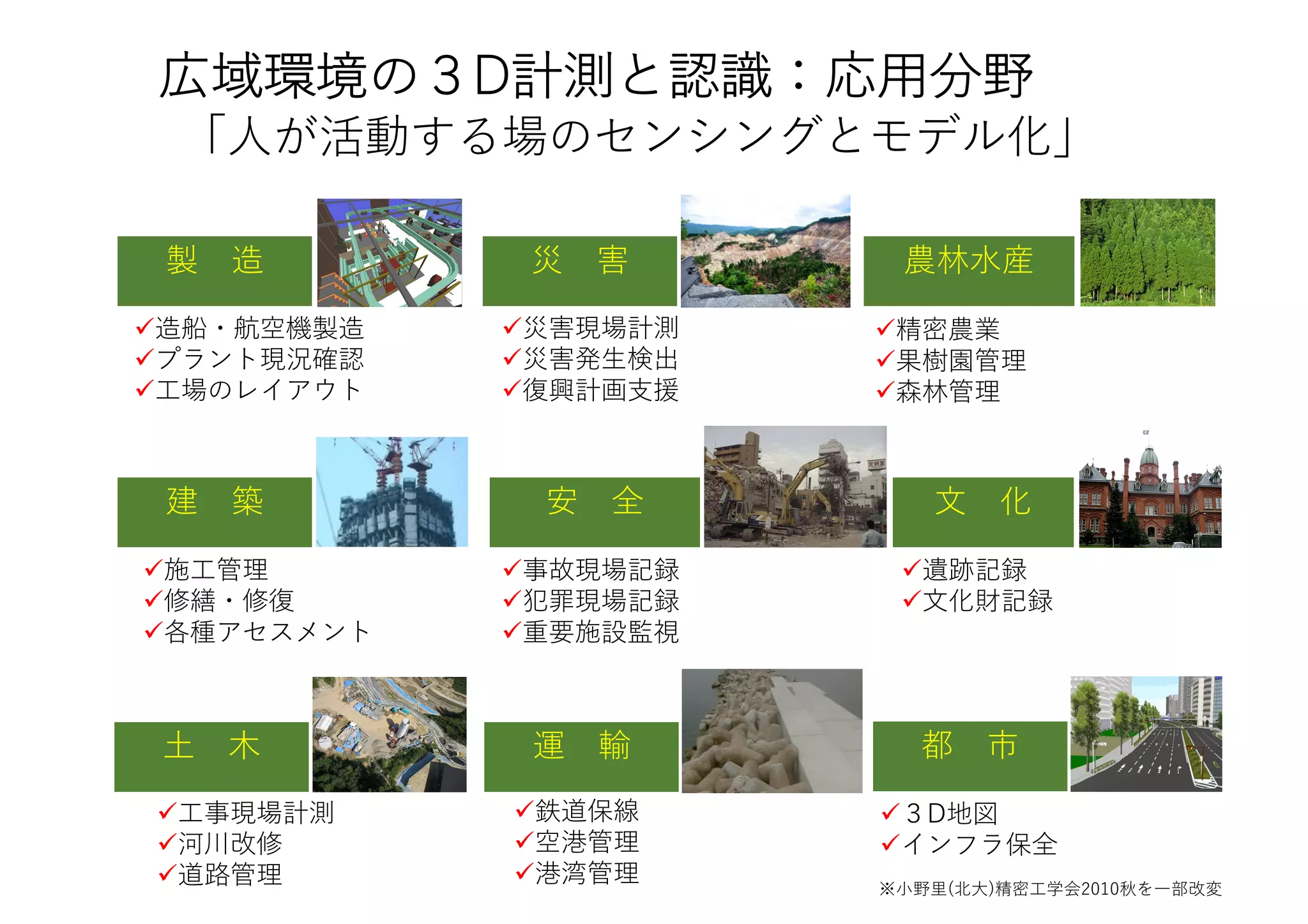

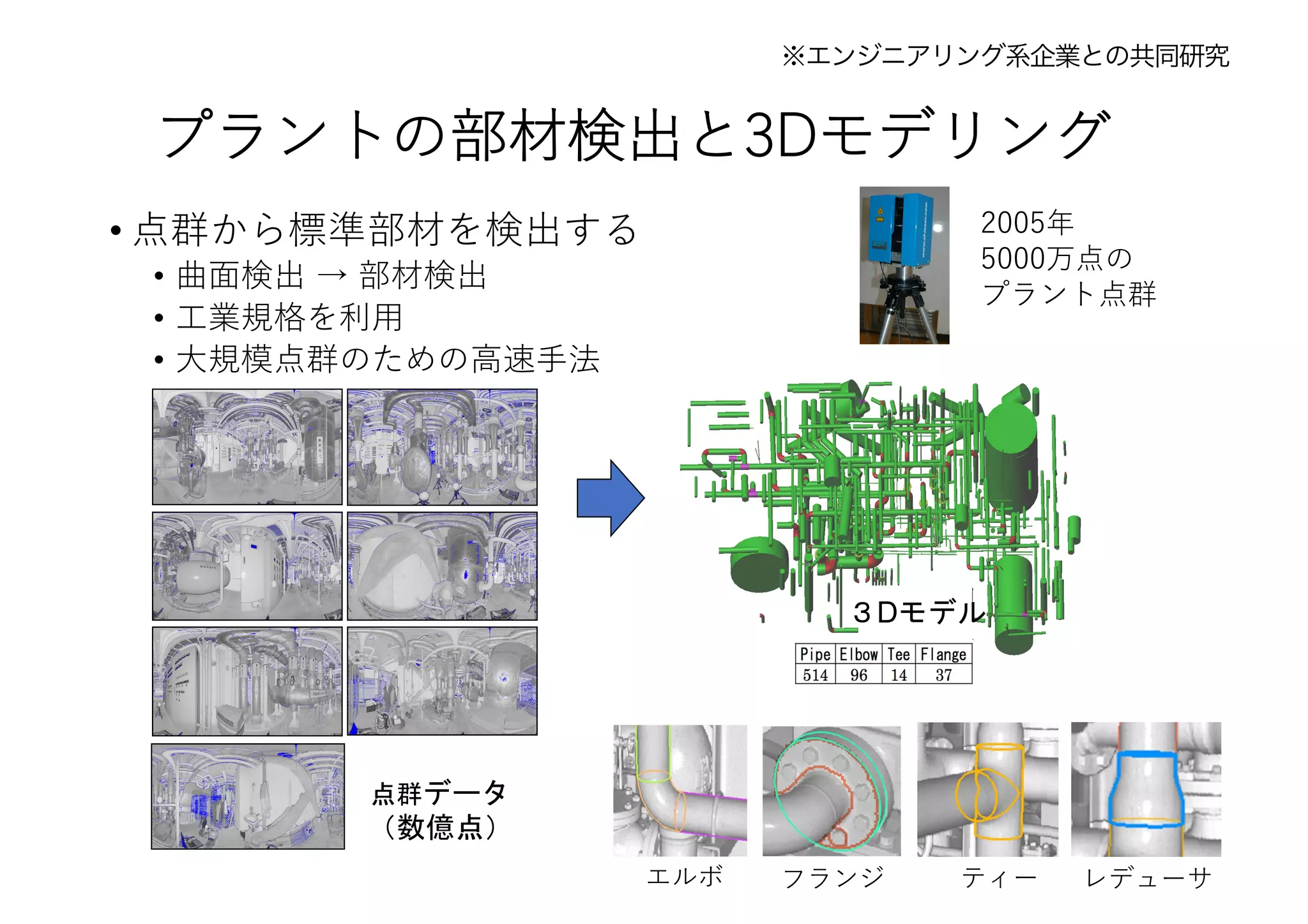
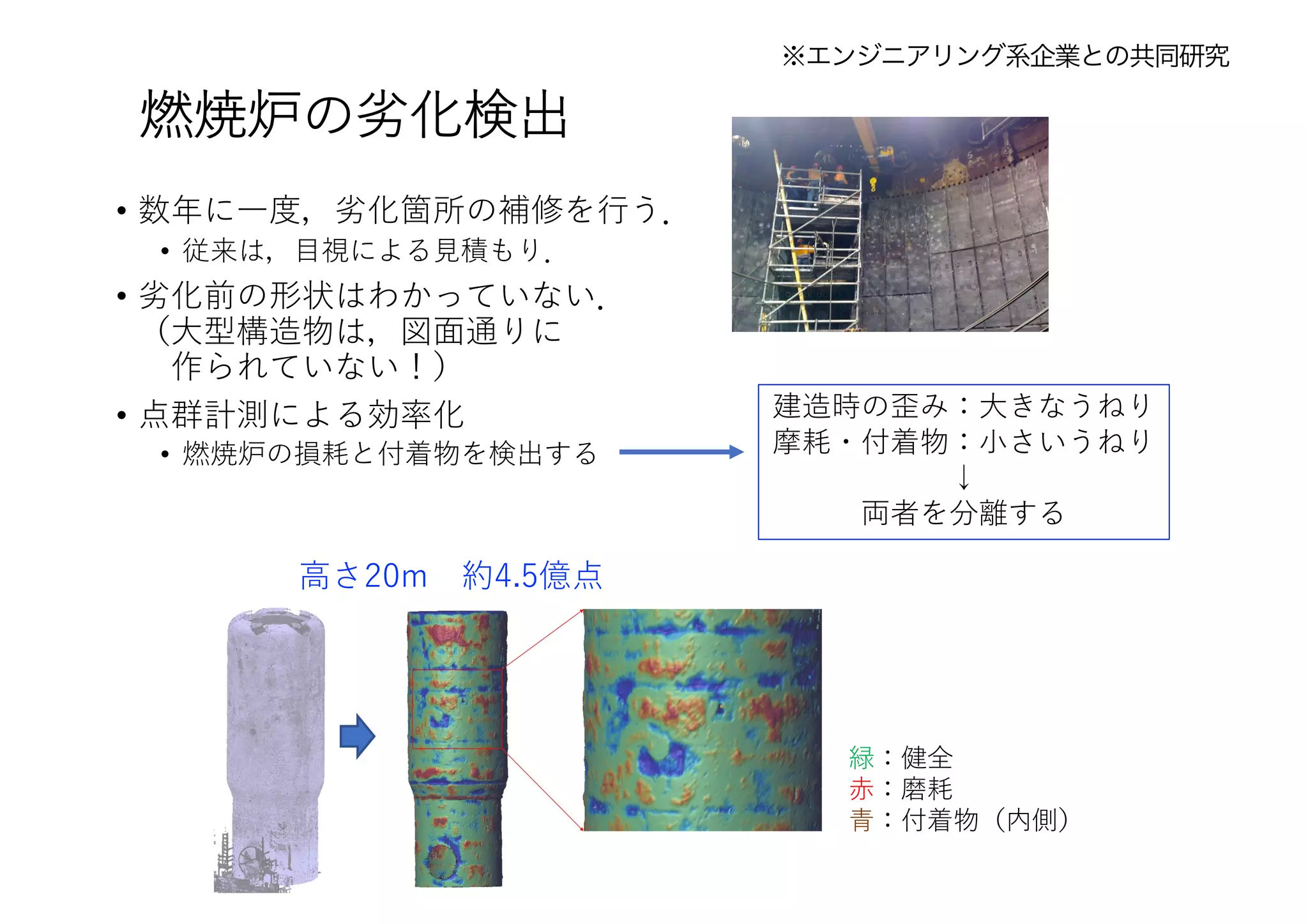
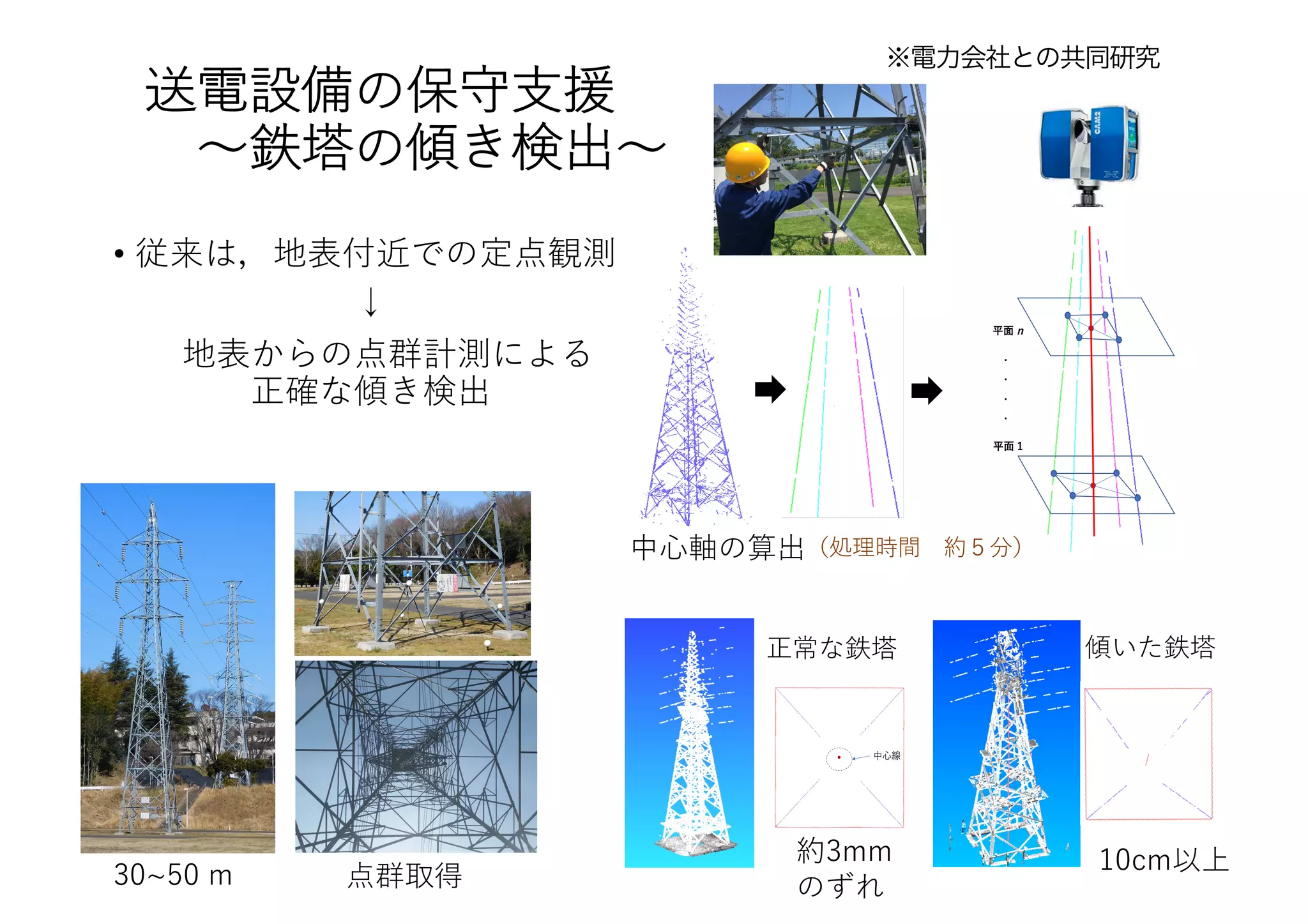
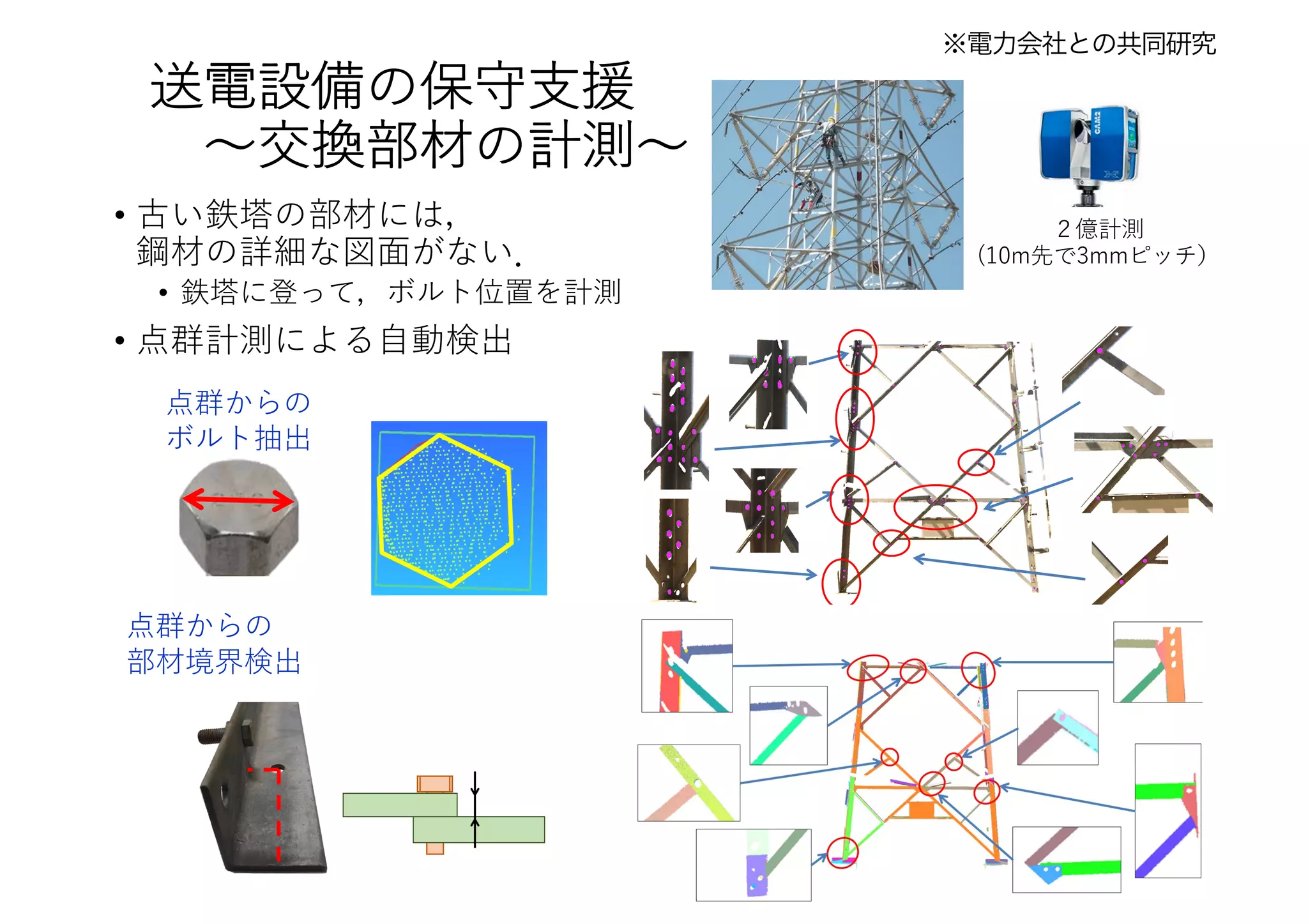
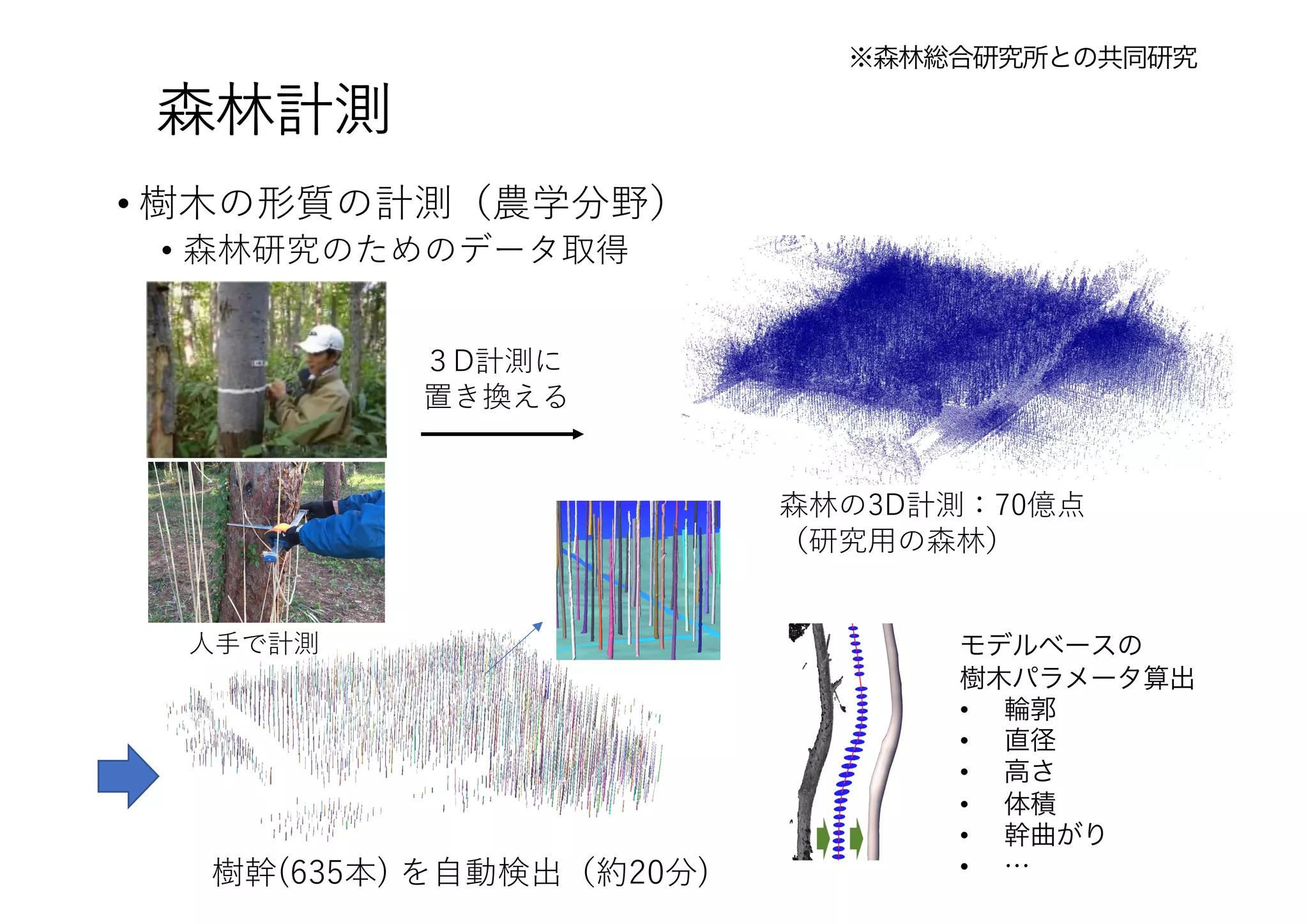
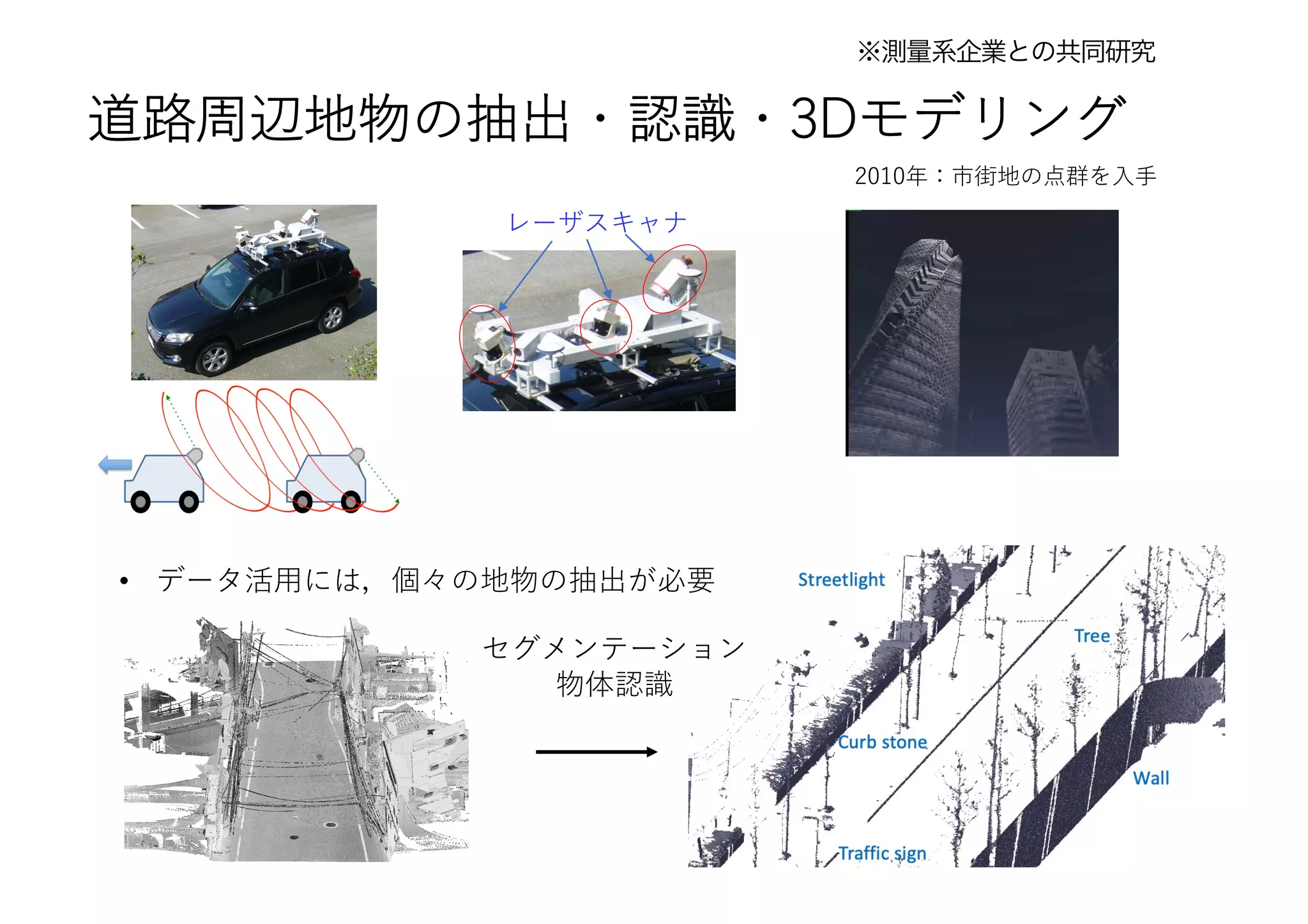

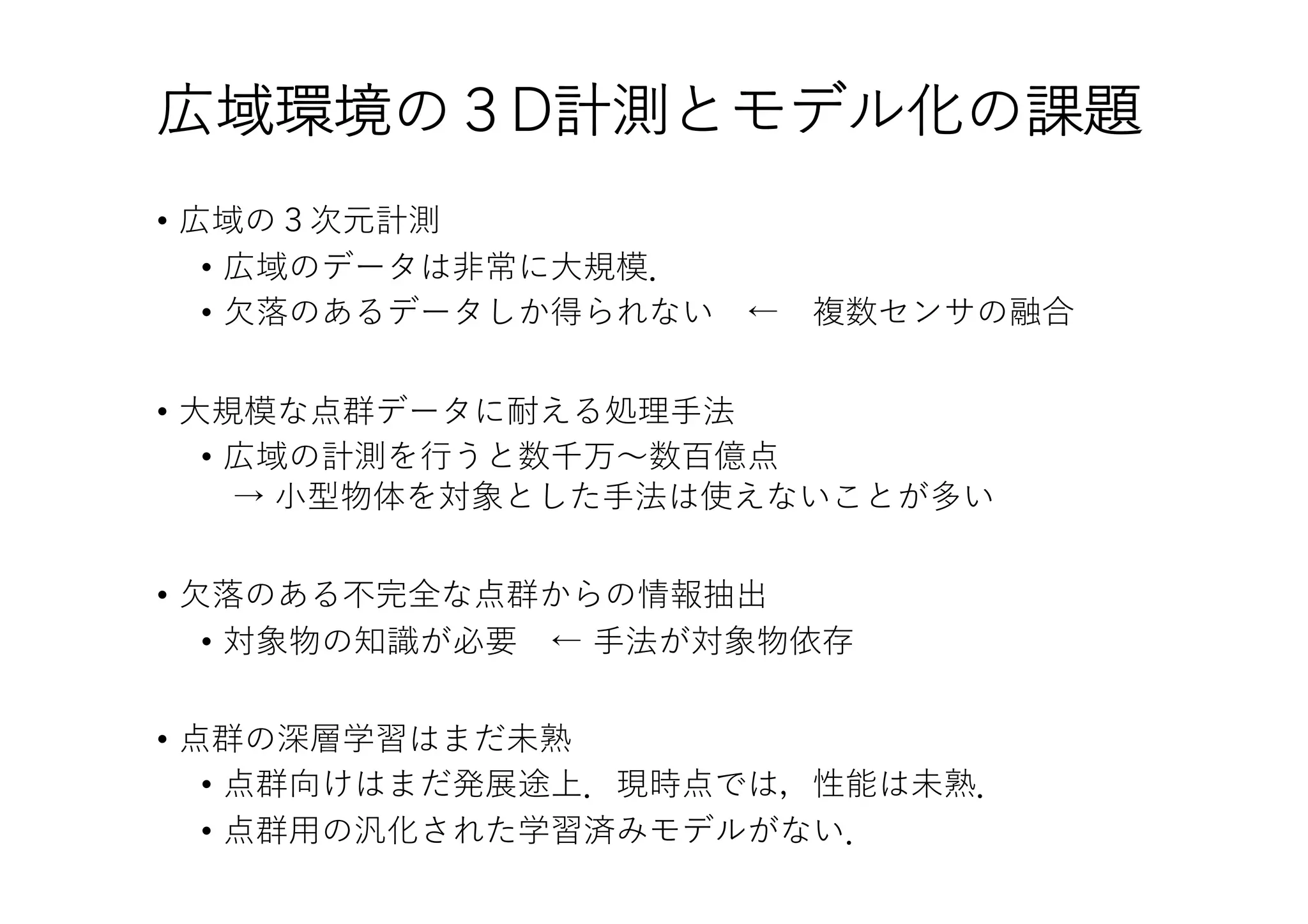

SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入) 6/11 (金) 11:00 - 12:30 オーガナイザー: 増田 宏 氏(電気通信大学) 概要:レーザスキャナを用いた3次元計測により、広域環境の3D情報を大規模な点群データとして取得できるようになりました。この技術は、人が活動する場、たとえば、生産現場、インフラ設備、交通網、都市、森林などの非常に広い分野において、現況把握、保全、進捗管理などの業務支援に活用できます。本セッションでは、この分野の第一人者を講師としてお招きし、広域環境の3D計測とモデル化について、技術と応用の両面から最新動向についてご講演いただきます。また、本分野の今後の展望についても議論したいと思います。



![[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/200515dlseminar-200515082345-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Dense Captioning分野のまとめ](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar-201202012355-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Graph R-CNN for Scene Graph Generation](https://cdn.slidesharecdn.com/ss_thumbnails/graphr-cnnforscenegraphgenerationkobayashi1130-181130001547-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)


![[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018)](https://cdn.slidesharecdn.com/ss_thumbnails/201807263dv-180728060959-thumbnail.jpg?width=640&height=640&fit=bounds)








![SSII2021 [OS3-03] 画像と点群を用いた、森林という広域空間のゾーニングと施業管理](https://cdn.slidesharecdn.com/ss_thumbnails/os3-04-210605062524-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3-02] BIM/CIMにおいて安価に点群を取得する目的とその利活用](https://cdn.slidesharecdn.com/ss_thumbnails/os3-03-210605062350-thumbnail.jpg?width=640&height=640&fit=bounds)









![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS3] コンテンツ制作を支援する機械学習技術〜 イラストレーションやデザインの基礎から最新鋭の技術まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts32022ssiiess-220607054523-e80be8dc-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-04] Human-in-the-Loop 機械学習](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-04-220607021031-e69700d5-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-03] スケーラブルなロボット学習システムに向けて](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-03-220607020929-1e2b15e8-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-02] Federated Learningの基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-02-220607020834-2b5f93ff-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-01] 深層学習のための効率的なデータ収集と活用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-01-220607020740-e80781dc-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS2-01] イメージング最前線](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os2-1-220607020403-b550c379-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS1-01] AI時代のチームビルディング](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os1-01-220607015404-49188612-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [SS2] Deepfake Generation and Detection – An Overview (ディープフェイクの生成と検出)](https://cdn.slidesharecdn.com/ss_thumbnails/ss2-01-210607043612-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS3] 機械学習のアノテーションにおける データ収集 〜 精度向上のための仕組み・倫理や社会性バイアス 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts3-01-210607043121-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3-01] 設備や環境の高品質計測点群取得と自動モデル化技術](https://cdn.slidesharecdn.com/ss_thumbnails/os3-02-210605062048-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS2-03] 自己教師あり学習における対照学習の基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/os2-04-210605061641-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS1-03] エネルギーの情報化:需要家主体の分散協調型電力マネージメント](https://cdn.slidesharecdn.com/ss_thumbnails/os1-04-210605055326-thumbnail.jpg?width=640&height=640&fit=bounds)