Downloaded 1,837 times
























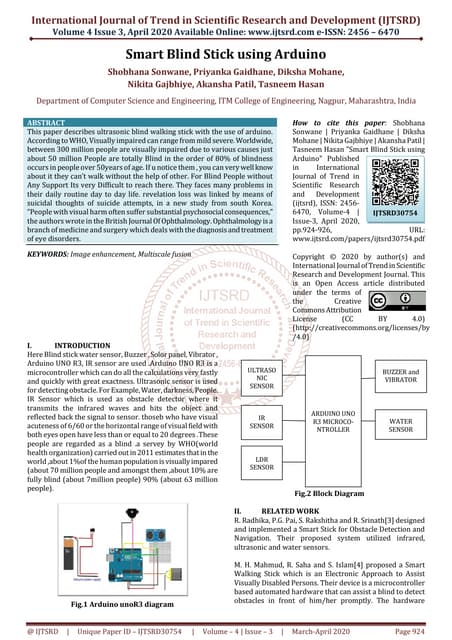
The document outlines the design and development of an ultrasonic navigation system for the visually impaired, aimed at enhancing mobility and safety compared to traditional white sticks. The proposed system integrates various sensors, including ultrasonic, infrared, fire, water, and light sensors, interfaced with an ATmega16 microcontroller, to detect obstacles and provide alerts to the user. Future improvements could include the incorporation of VLSI technology and GPS capabilities for enhanced navigation assistance.