Download to read offline

![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 07 Issue: 03 | Mar 2020 www.irjet.net p-ISSN: 2395-0072
© 2020, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 194
3. WORKING
The existing system consists of the devices used for helping
blind peoples to detect the obstacles and travel to places; It
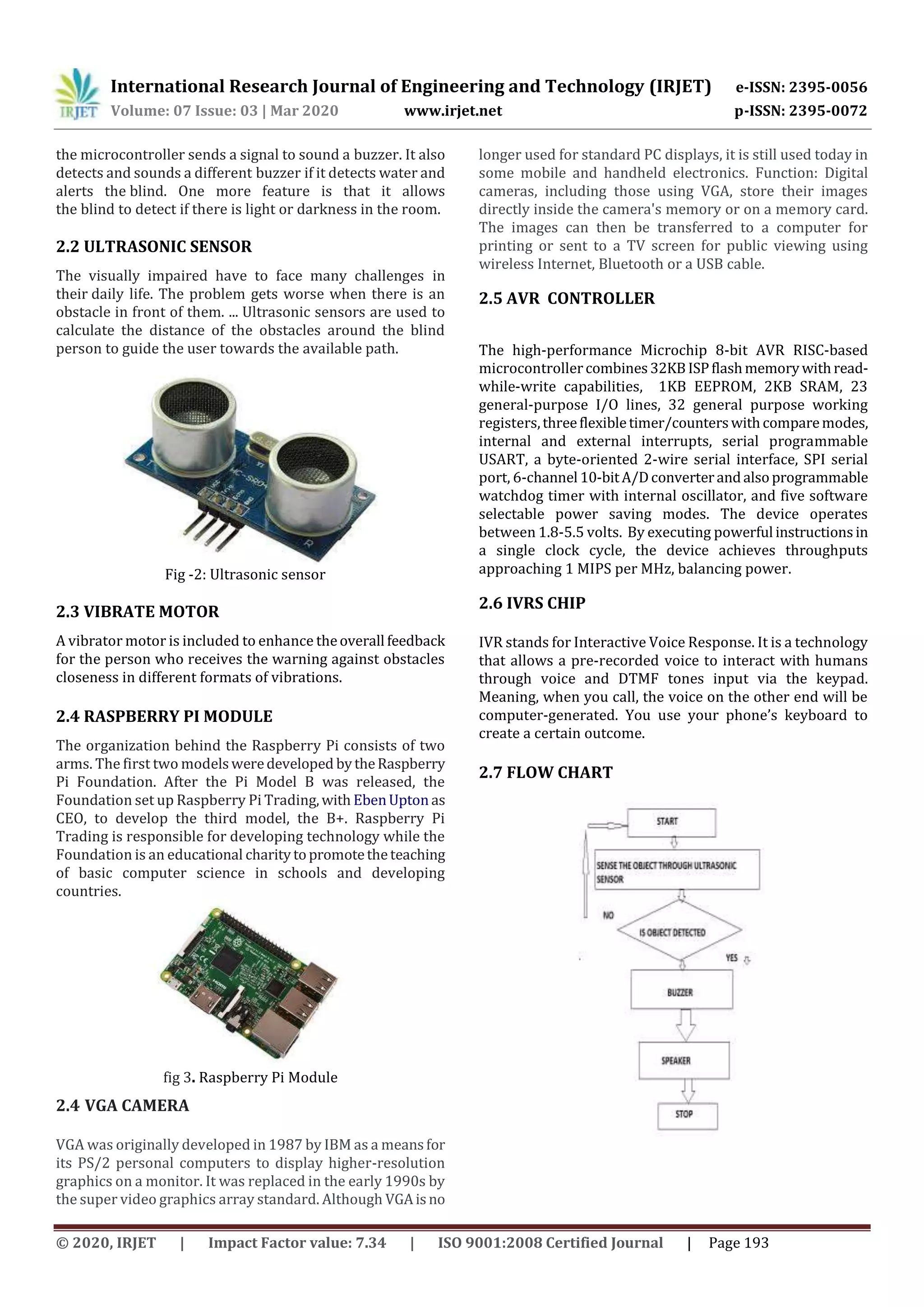
is a smart device like a torch for blinds. When an ultrasonic
sensor detects the obstacle then vibrating motor vibrates
and also there is audio to turn left or right. So the blind
people move in a safe place. VGA camera captures the image
and sends it towards the controller for the identification.
4. CONCLUSIONS
It is worth mentioning at this point that the aim of this study
which is the design and implementation of a Third eye for
the blind has been fully achieved. The ultrasonic sensor acts
as a basic platform for the coming generation of more aiding
devices to help the visually impaired to navigate safely both
indoor and outdoor. It is effective and affordable. It leads to
good results in detecting the obstacles on the path of the
user in a range of three meters.Thissystemoffersa low-cost,
reliable, portable, low power consumption and robust
solution for navigationwiththeobviousshortresponsetime.
Though the system is hard-wired with sensors and other
components, it's light in weight. Further aspects of this
system can be improved via wireless connectivity between
the system components, thus, increasing the range of the
ultrasonic sensor and implementing technology for
determining the speed of approaching obstacles.
5. REFERENCES
[1] S. Alghamdi, R. Van Schyndel, I. Khalil, "Safe trajectory
estimation at a pedestrian crossing to assist visually
impaired people", Engineering in Medicine and Biology
Society (EMBC), 2012 Annual International Conference of
the IEEE, On page(s): 5114 - 5117.
[2] S.BHARATHI, A. RAMESH, S. VIVEK, Effective navigation
for visually impaired by wearable obstacle avoidance
system. International Conference on Computing,Electronics
and Electrical Technologies (ICCEET), 2012.
[3] K. XIANGXIN, W. YUANLONG, L. MINCHEOL,Visionbased
guidedog robot system for visually impaired in urban
system. 13th International Conference on Control,
Automation and Systems (ICCAS), 2013.
[4] Y. Tian, W. R. Hamel and J. Tan, "Accurate human
navigation using wearable monocular visual and inertial
sensors", IEEE Trans. Instrum.](https://image.slidesharecdn.com/irjet-v7i340-201201063950/75/IRJET-Third-Eye-for-Blind-People-using-Ultrasonic-Vibrating-Gloves-with-Image-Processing-3-2048.jpg)

This document describes a proposed system called a "Third Eye for Blind People Using Ultrasonic Vibrating Gloves with Image Processing" that aims to help blind people identify objects and navigate safely. The system uses ultrasonic sensors on gloves to detect obstacles within 3 meters and vibrates motors or provides audio alerts. It also includes a camera on a hat that captures images for object recognition processing on a Raspberry Pi module. The proposed system is presented as a low-cost, portable solution to help blind people with navigation and object identification challenges in daily life.














































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)






