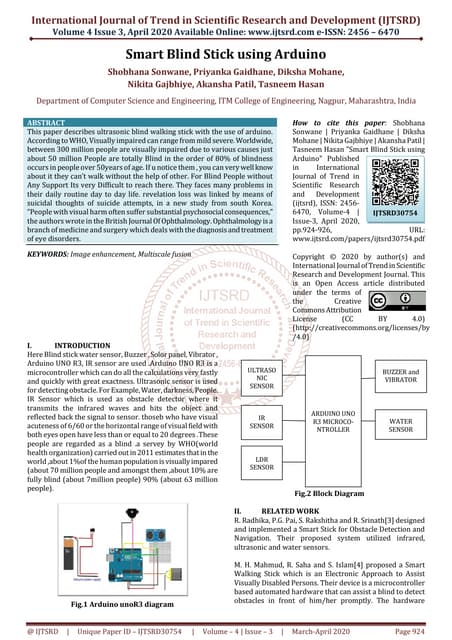
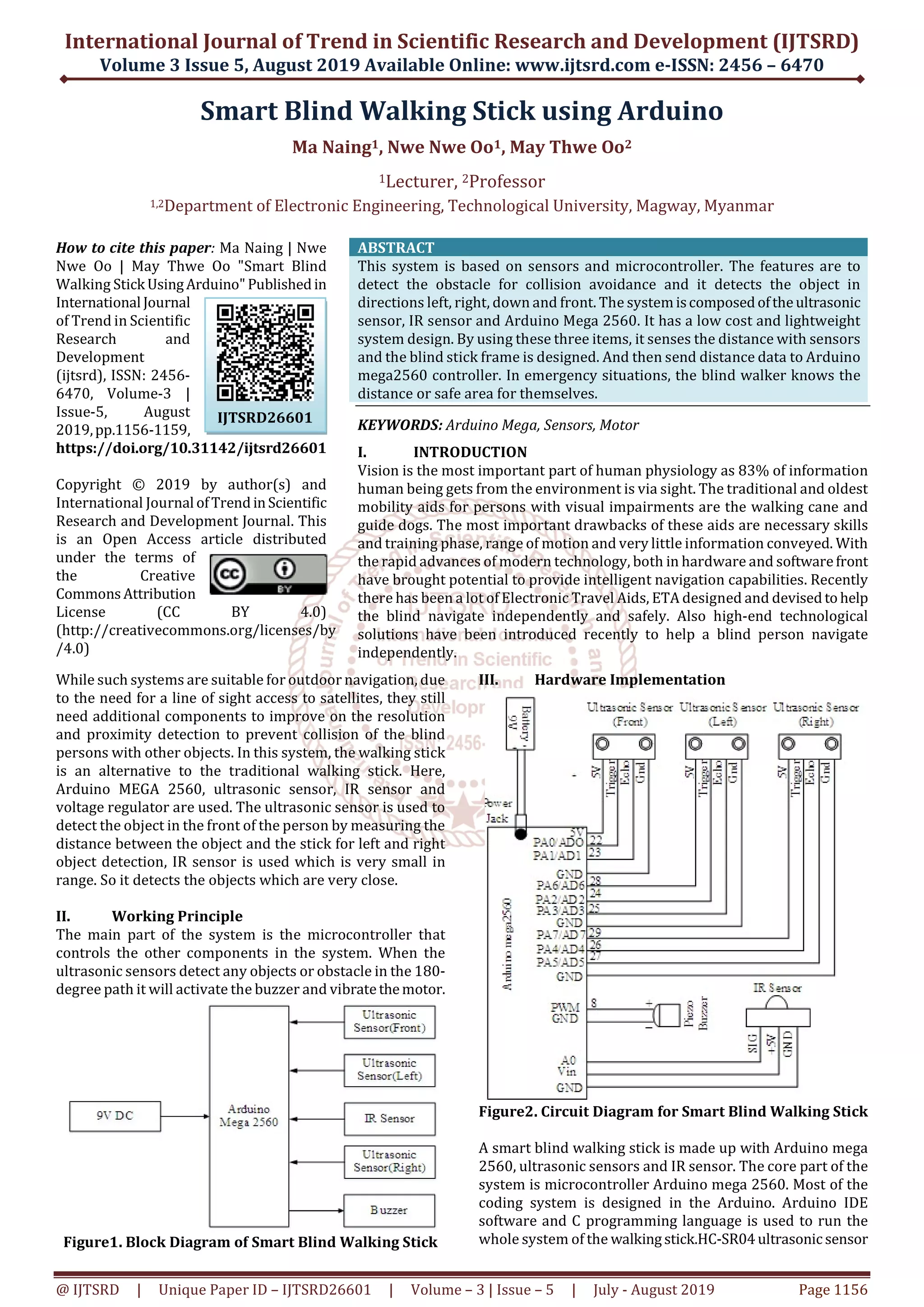
The document presents a smart blind walking stick utilizing Arduino technology, designed to enhance mobility and safety for visually impaired individuals. It incorporates ultrasonic and IR sensors to detect obstacles in multiple directions, alerting users through a buzzer and voice messages. The system aims to provide an affordable solution for independence in navigation, addressing the limitations of traditional mobility aids.

![International Journal of Trend in Scientific Research and Development (IJTSRD) @ www.ijtsrd.com eISSN: 2456-6470
@ IJTSRD | Unique Paper ID – IJTSRD26601 | Volume – 3 | Issue – 5 | July - August 2019 Page 1159
VII. REFERENCES
[1] Dambhara, S. & Sakhara, A., 2011, “Smart stick for
Blind: Obstacle Detection, Artificial vision and Real-
time assistance via GPS”, International Journal of
Computer Applications® (IJCA).
[2] FRENKEL, R., 2008, “Coded Pulse Transmission and
Correlation for Robust”, Amherst: University of
Massachusetts.
[3] Johann B., Iwan U., 1997, “The Guide Cane: A
Computerized Travel Aid for the Active Guidance of
Blind Pedestrians Proceedings of the IEEE
InternationalConferenceon RoboticsandAutomation”,
Albuquerque.
[4] Kang, S. J., Ho, Y., K. & Moon, I. H., March 2013,
“Development of an Intelligent Guide-Stick for the
Blind”, Seoul, Korea, IEEE.
[5] http://www.ndk.com/en/sensor/ultrasonic/images/t
op_pic_01.jpg
[6] Nusrat, S. A., 2010, “Send and Read SMS through a GSM
Modem using AT Commands”
<http://www.codeproject.com/Articles/38705/Send-
and-Read-SMS-through-a-GSM-Modem-using-AT-
Com>.
[7] Sakhardande, J., Pattanayak, P. & Bhowmick, M., May
2013. “Smart Cane Assisted Mobility for the Visually
Impaired”, Engineering and Technology, Issue 70.
[8] REIS, R. A., 1997. “Ultrasonic Motion Detector”, U.S:
POP tronix.
[9] http://www.mid-day.com/articles/iit-delhi-creates
affordable-smart-cane-for-the
blind/15506173#sthash.oI4Pa9Vm.dpuf
[10] Koley, S. and Mishra, R.,2012,“VoiceOperatedOutdoor
Navigation System for Visually Impaired Persons”,
International Journal of Engineering Trends and
Technology](https://image.slidesharecdn.com/220smartblindwalkingstickusingarduino-190912051610/75/Smart-Blind-Walking-Stick-Using-Arduino-4-2048.jpg)