Downloaded 1,263 times





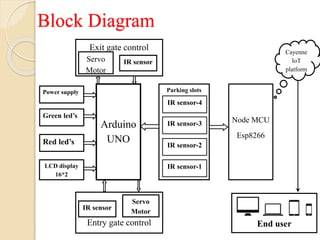











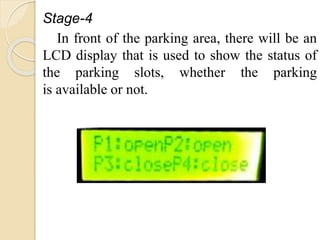
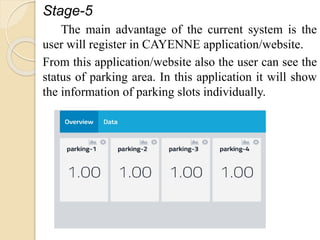





This document describes a smart car parking system using IoT. The system uses sensors to detect available parking spots and sends the information to a display and mobile app. Cars enter and exit the parking area through automated gates controlled by IR sensors. Users can check the app to see available spots and navigate to empty ones indicated by green LED lights, while occupied spots have red lights. This optimized system reduces traffic and pollution compared to traditional parking methods.