Downloaded 1,255 times
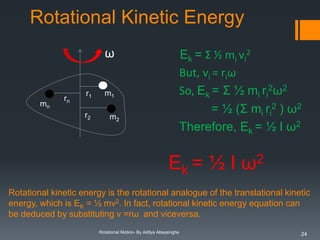
![τ = (Iω – Iω0 )/t
τ = I [(ω - ω0 )/t]
Therefore,
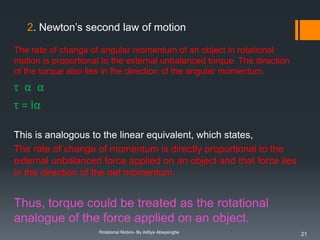
τ = Iα
By Newton’s second law
of motion
F = ma
Fr = mra = mr (rα) ( as
a=rα)
Fr= mr2 α
Fr = Iα
( as I= mr2 )
However, from the above
derivation, Iα = τ .
Therefore, Fr = τ
Thus
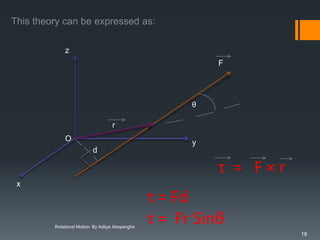
, τ = Fr
Rotational Motion- By Aditya Abeysinghe
17](https://image.slidesharecdn.com/rotationalmotion-131204101006-phpapp01/85/Rotational-motion-17-320.jpg)

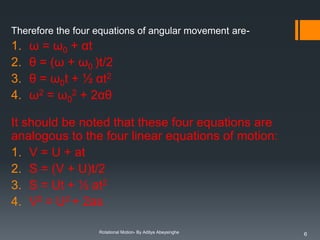
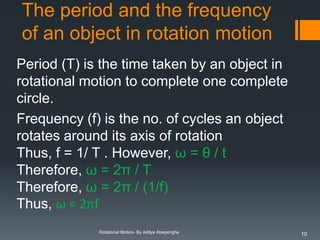
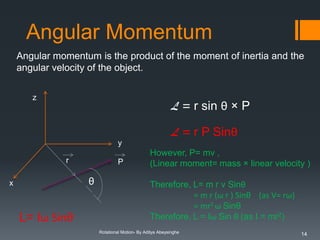
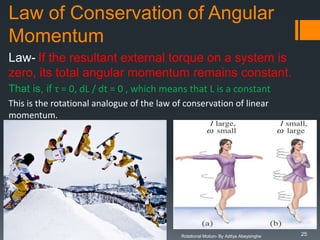
![Applying Newton’s laws to
rotational motion
1. Newton’s First law and equilibriumIf the net torque acting on a rigid object is zero, it will
rotate with a constant angular velocity.
If the system
Concept of equilibriumd
M
Therefore, τM
3d
m
O
is
at
equilibrium, total
torque around O
should be zero
+ τm = 0
Mgd + [ -(mg(3d))] = 0
Therefore, m = M/3
Rotational Motion- By Aditya Abeysinghe
20](https://image.slidesharecdn.com/rotationalmotion-131204101006-phpapp01/85/Rotational-motion-20-320.jpg)
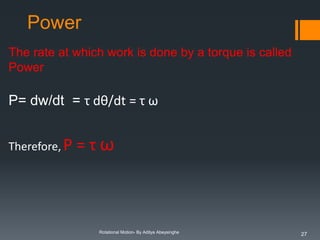
![Work done by a torque
dW = τ dθ
Therefore, the total work done in rotating the body from an angular
displacement of θ1 to an angle displacement θ2 is
θ2
W=
∫ τ dθ
θ1
θ2
W= τ ∫ 1. dθ
θ1
Therefore,
W= τ [θ2 - θ1 ]
Rotational Motion- By Aditya Abeysinghe
26](https://image.slidesharecdn.com/rotationalmotion-131204101006-phpapp01/85/Rotational-motion-26-320.jpg)
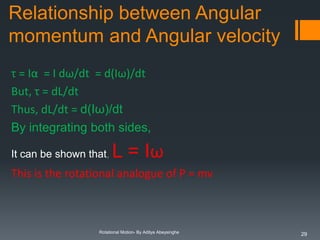
![Work - Energy Principle
From ω2 = ω02 + 2αθ and W= τθ , it is clear that the work
done by the net torque is equal to the change in
rotational kinetic energy.
τ = Iα and ω2 = ω02 + 2αθ .
Therefore, ω2 = ω02 + 2(τ/I)θ .
Thus, ω2 = ω02 + 2[(τθ)/I] .
Thus, ω2 = ω02 + 2W/I
OR
W= ½ I (ω2 - ω02 ). This is called
the work-energy principle.
Rotational Motion- By Aditya Abeysinghe
28](https://image.slidesharecdn.com/rotationalmotion-131204101006-phpapp01/85/Rotational-motion-28-320.jpg)
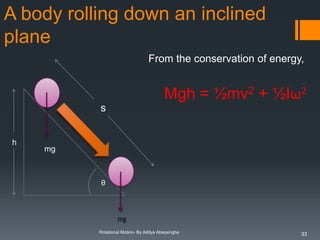
![Torque
Torque is called the moment of force and is a measure of the
turning effect of the force about a given axis.
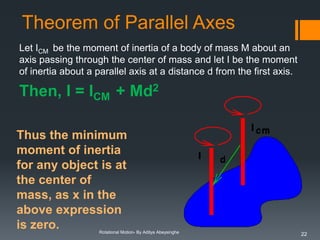
Theorem of parallel
axes
Let ICM be the moment of inertia of a body of mass M about an
axis passing through the center of mass and let I be the moment
of inertia about a parallel axis at a distance d from the first axis.
Then, I = ICM + Md2
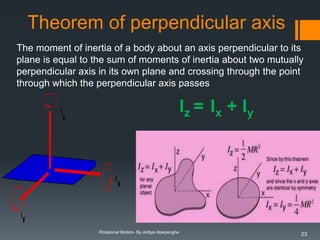
Theorem of
perpendicular axes
The moment of inertia of a body about an axis perpendicular to its
plane is equal to the sum of moments of inertia about two
mutually perpendicular axis in its own plane and crossing through
the point through which the perpendicular axis passes
Iz = Ix + I y
Rotational kinetic
energy
Ek = ½ I ω2
Law of conservation
of angular
momentum
If the resultant external torque on a system is zero, its total
angular momentum remains constant.
Work done
W = τ [θ2 - θ1 ]](https://image.slidesharecdn.com/rotationalmotion-131204101006-phpapp01/85/Rotational-motion-37-320.jpg)

1. The document defines key terms related to rotational motion such as angular position, angular displacement, angular velocity, and angular acceleration. 2. It also outlines the four fundamental equations of angular motion and how they are analogous to the linear equations of motion. 3. Key concepts such as moment of inertia, torque, angular momentum, and their relationships to linear motion are summarized.























































































