Downloaded 42 times
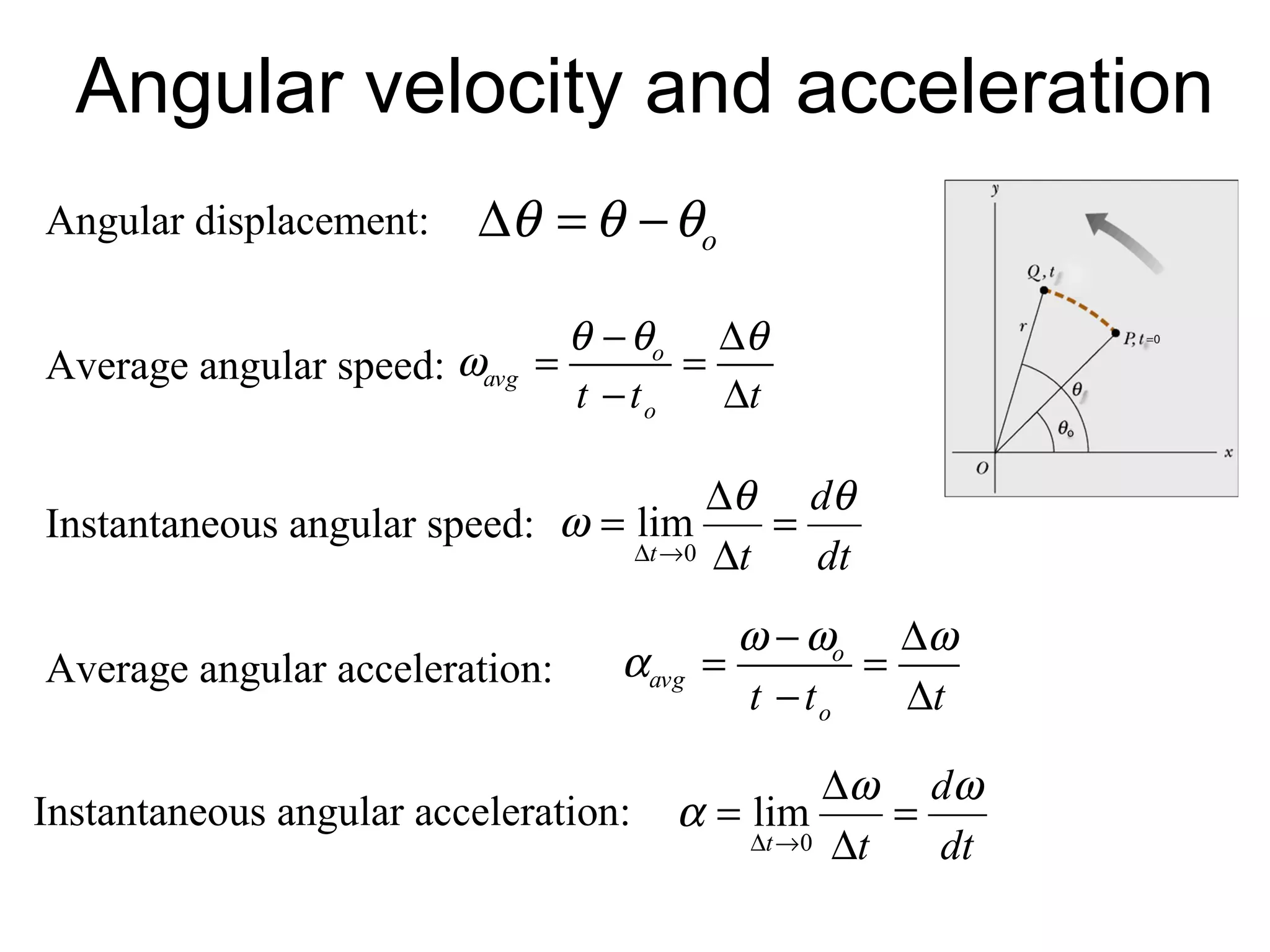

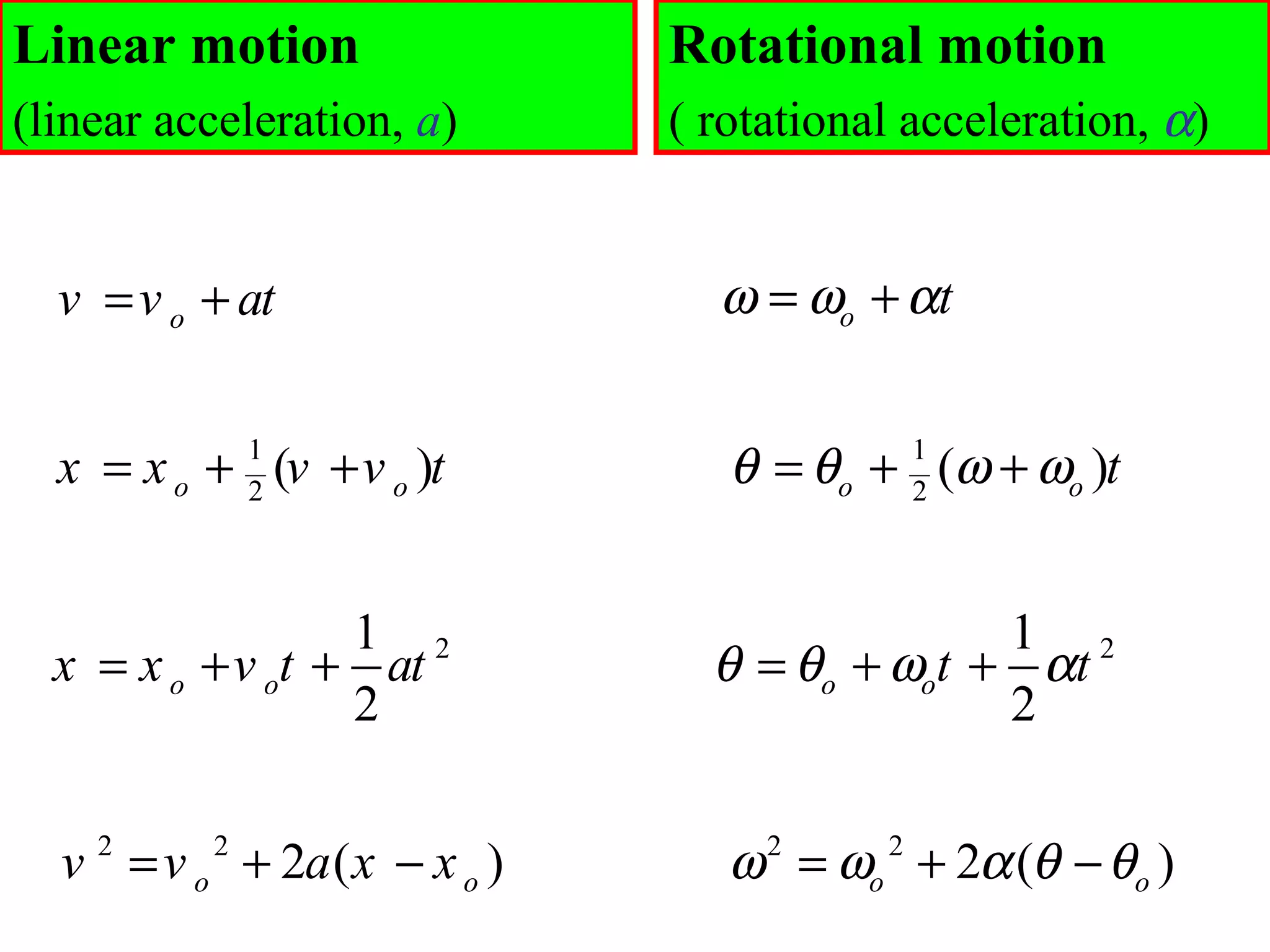


1) Uniform acceleration, energy transfer, and oscillating mechanical systems are examined in Chapter 2 on dynamic engineering systems. 2) Outcomes for Chapter 2 include analyzing dynamic systems involving uniform acceleration and determining the behavior of oscillating mechanical systems. 3) Mechanics involves the study of kinematics (motion), kinetics (forces), and statics (equilibrium) to describe the behavior of objects.






















































































