Downloaded 779 times
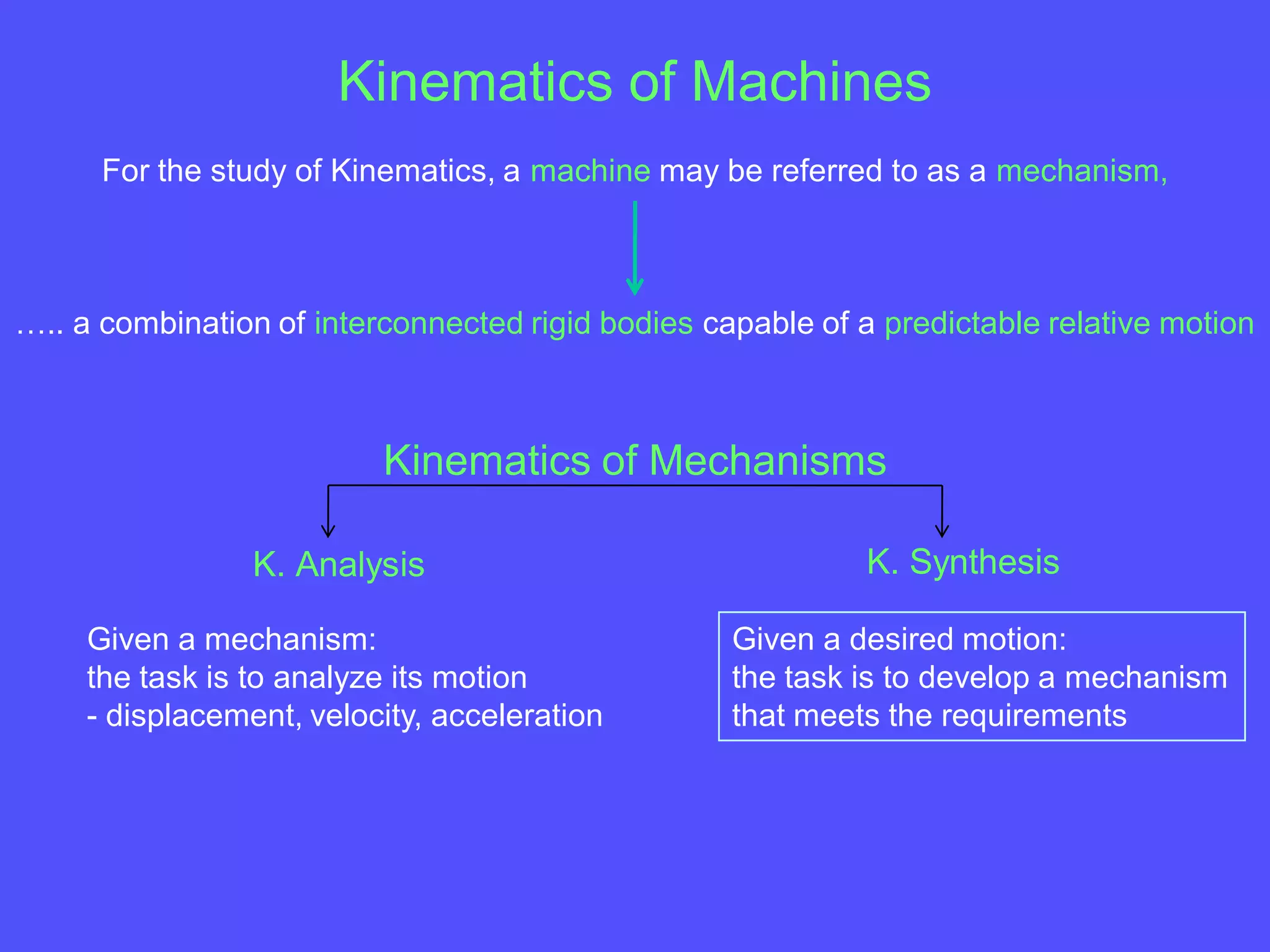
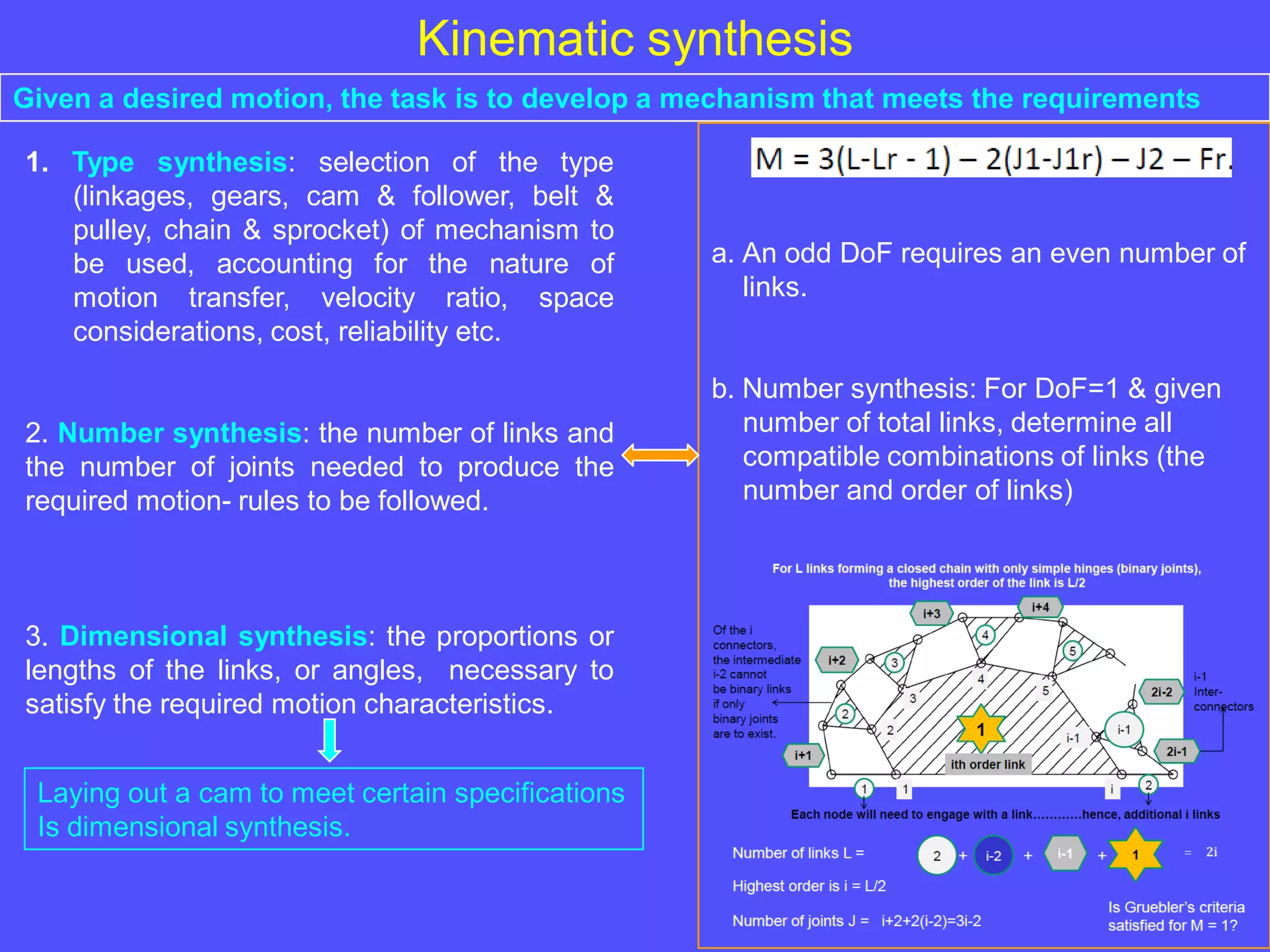
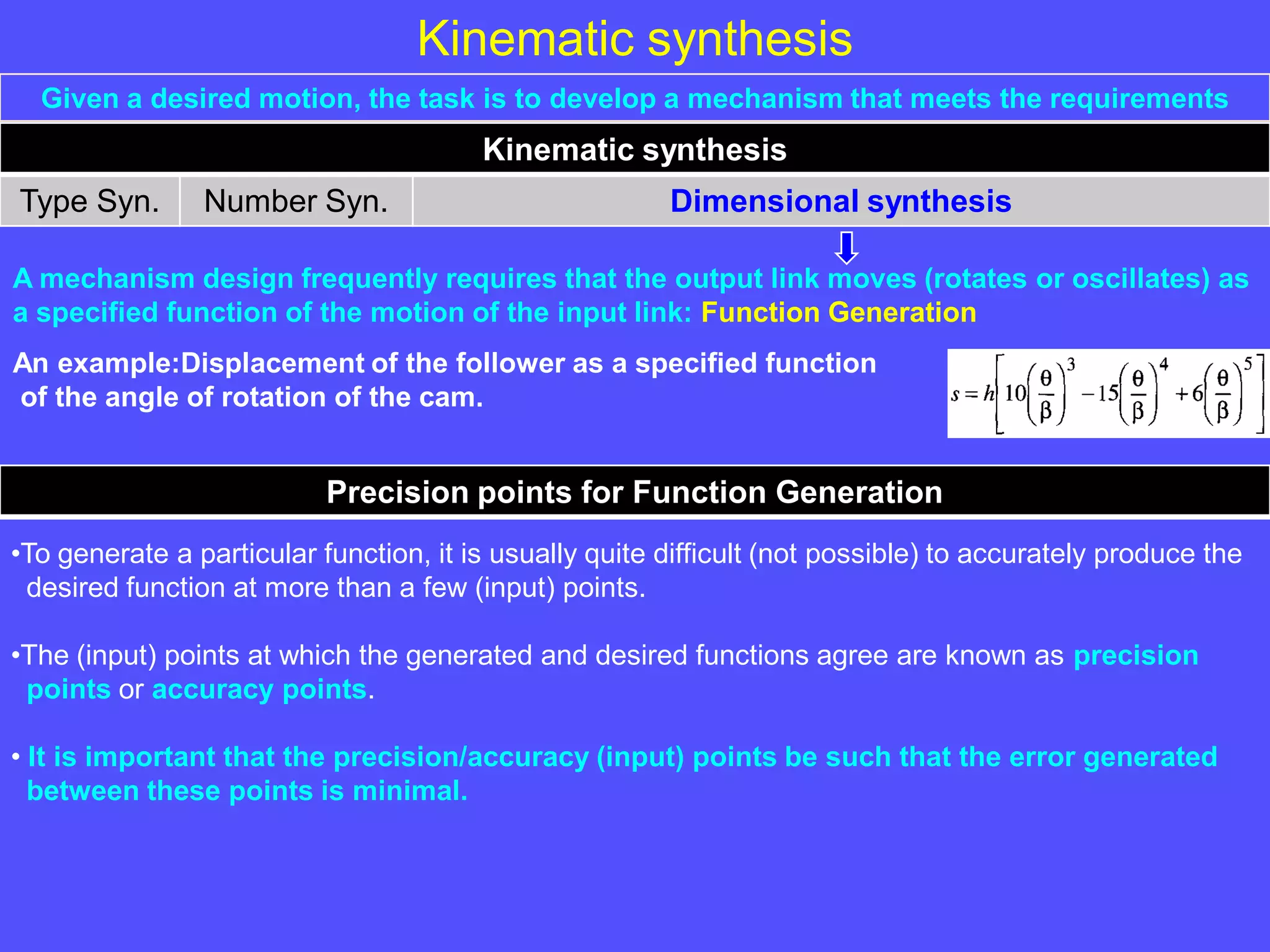
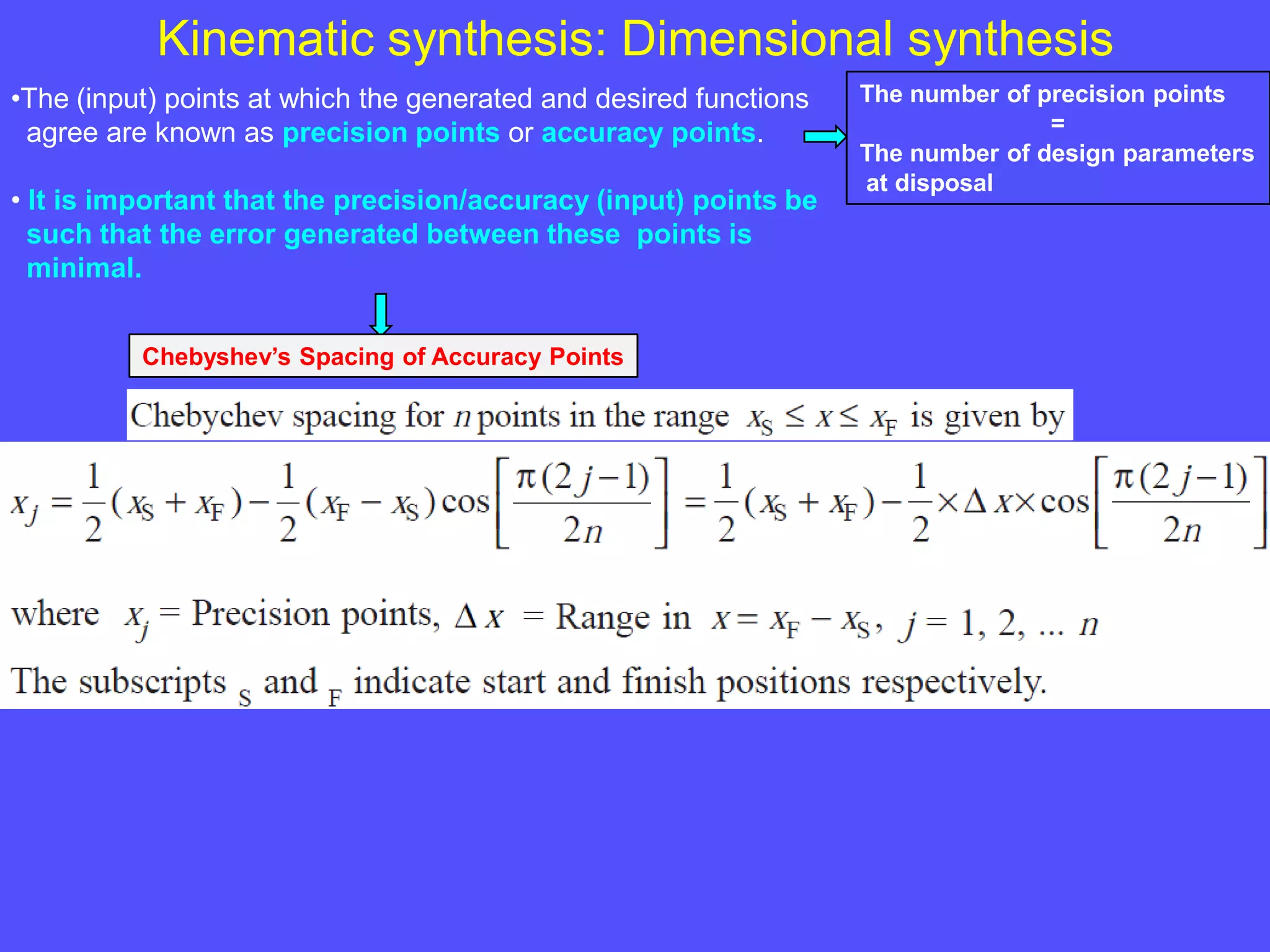
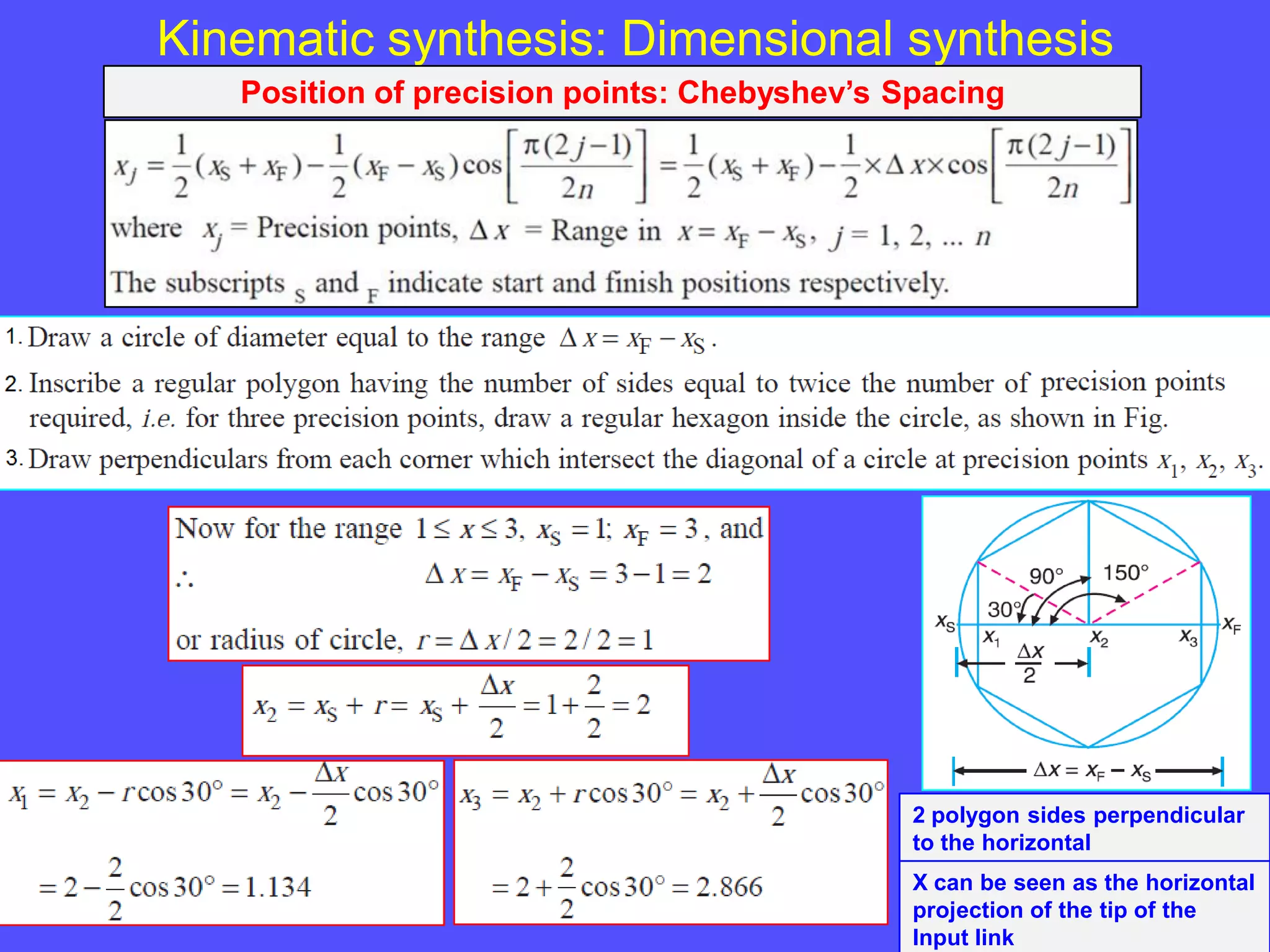
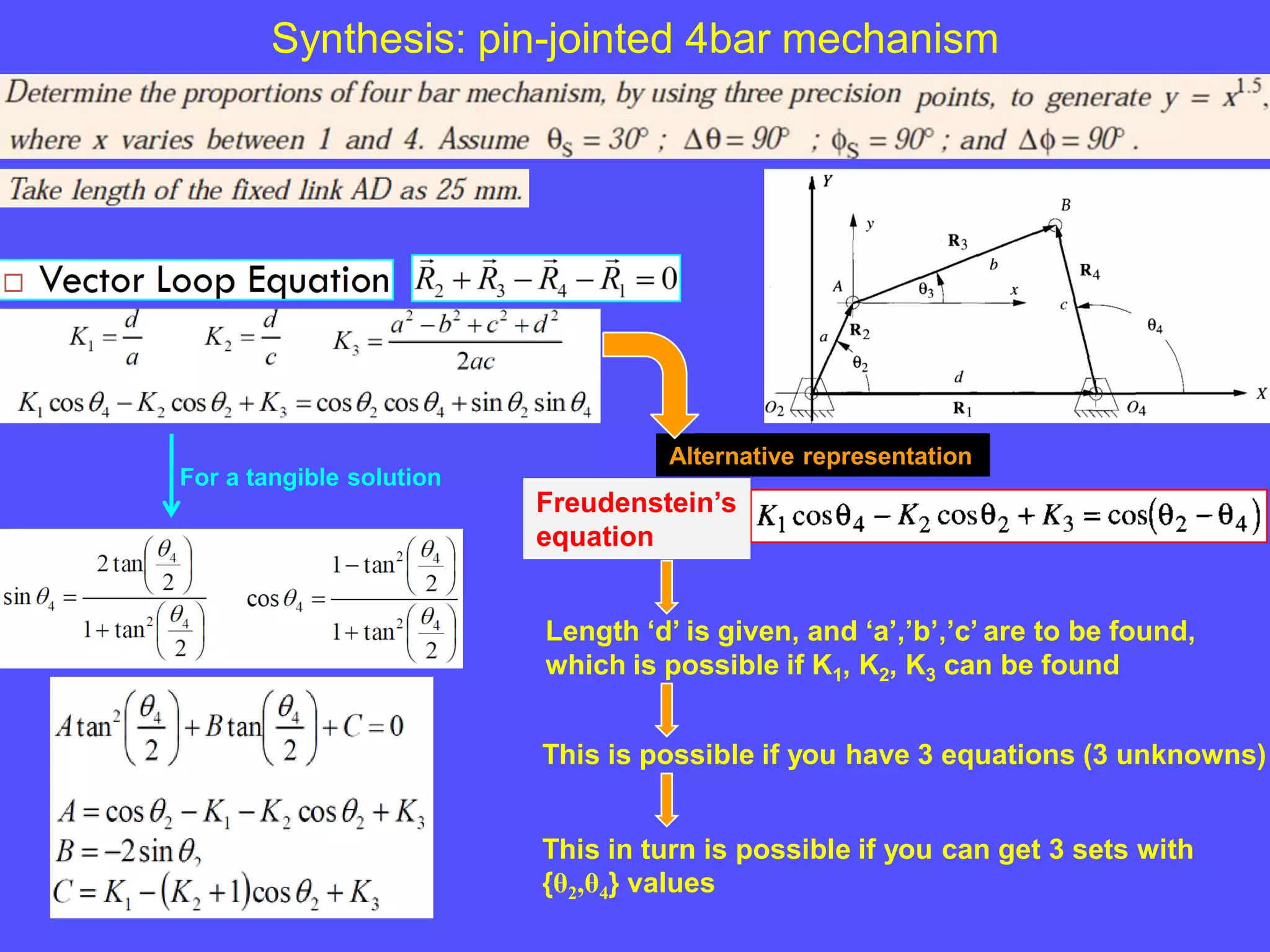
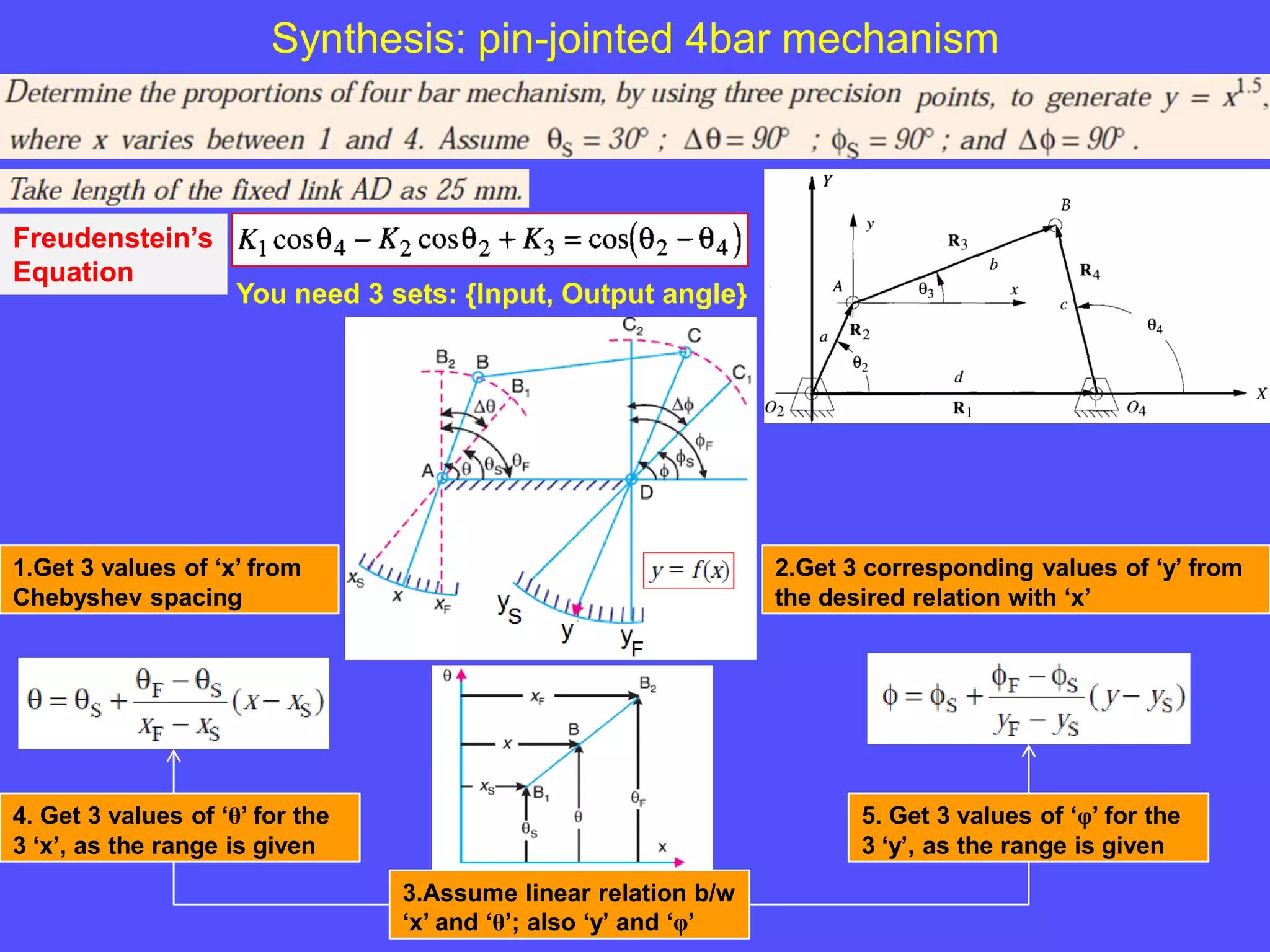
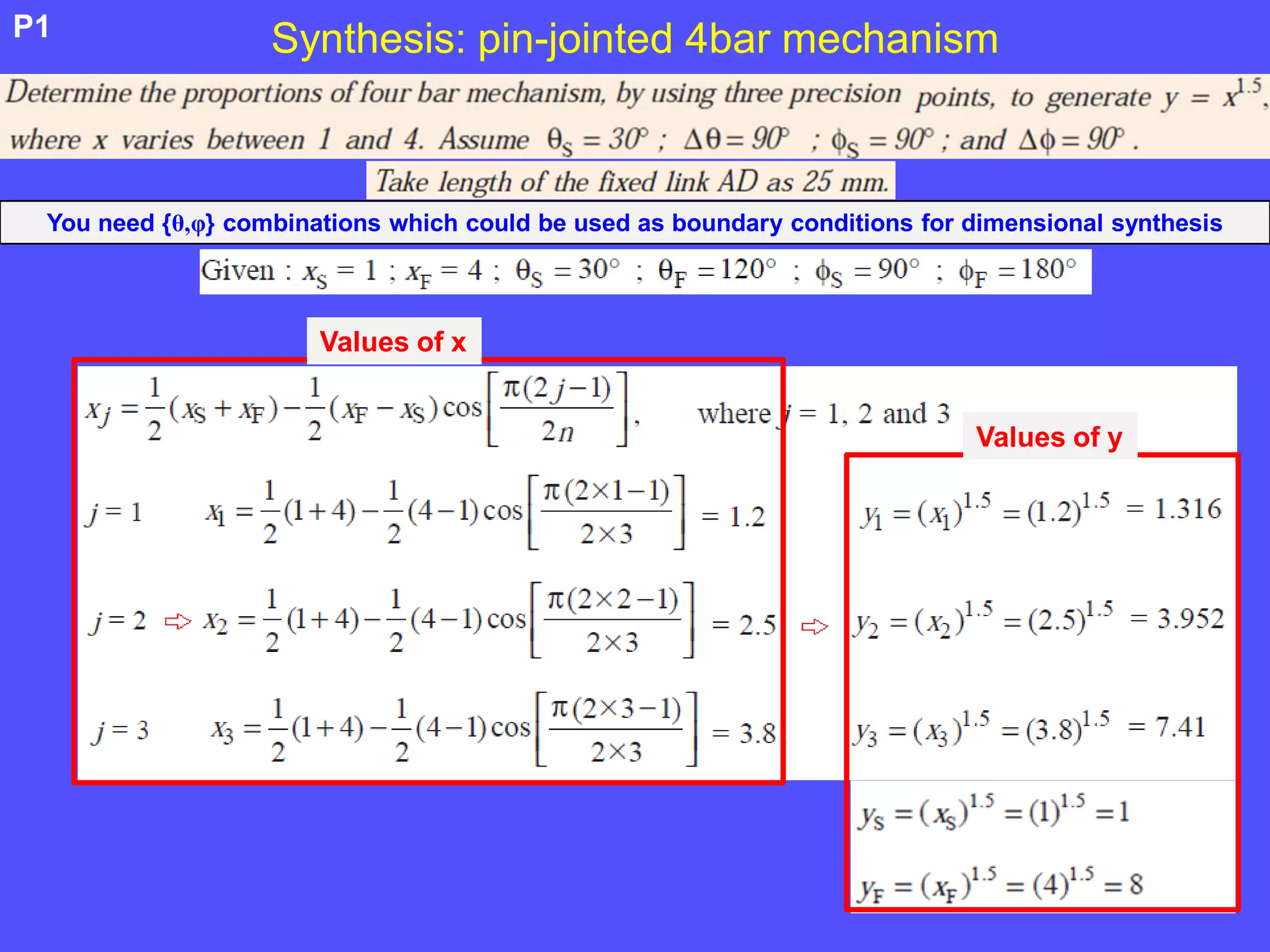
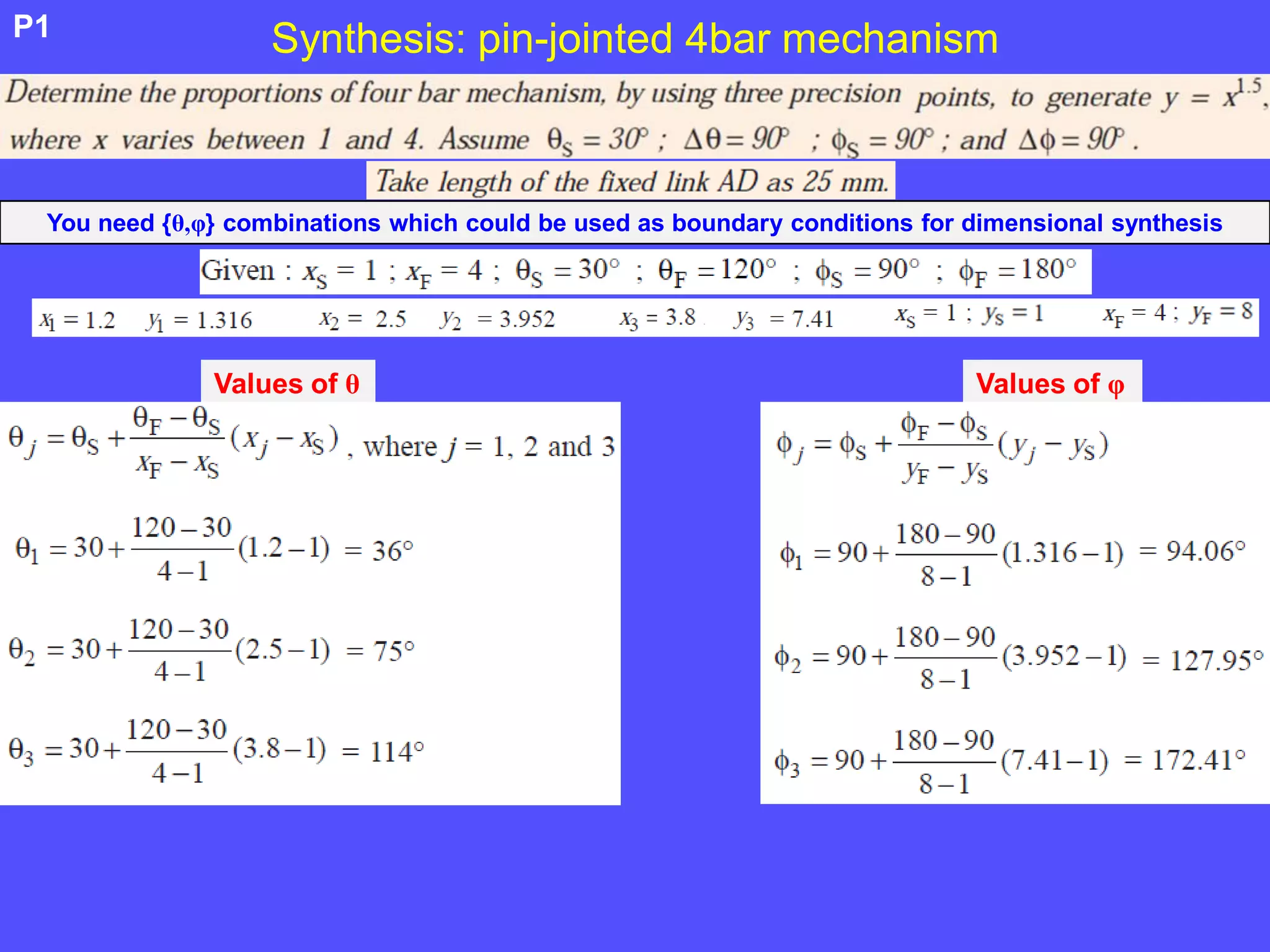
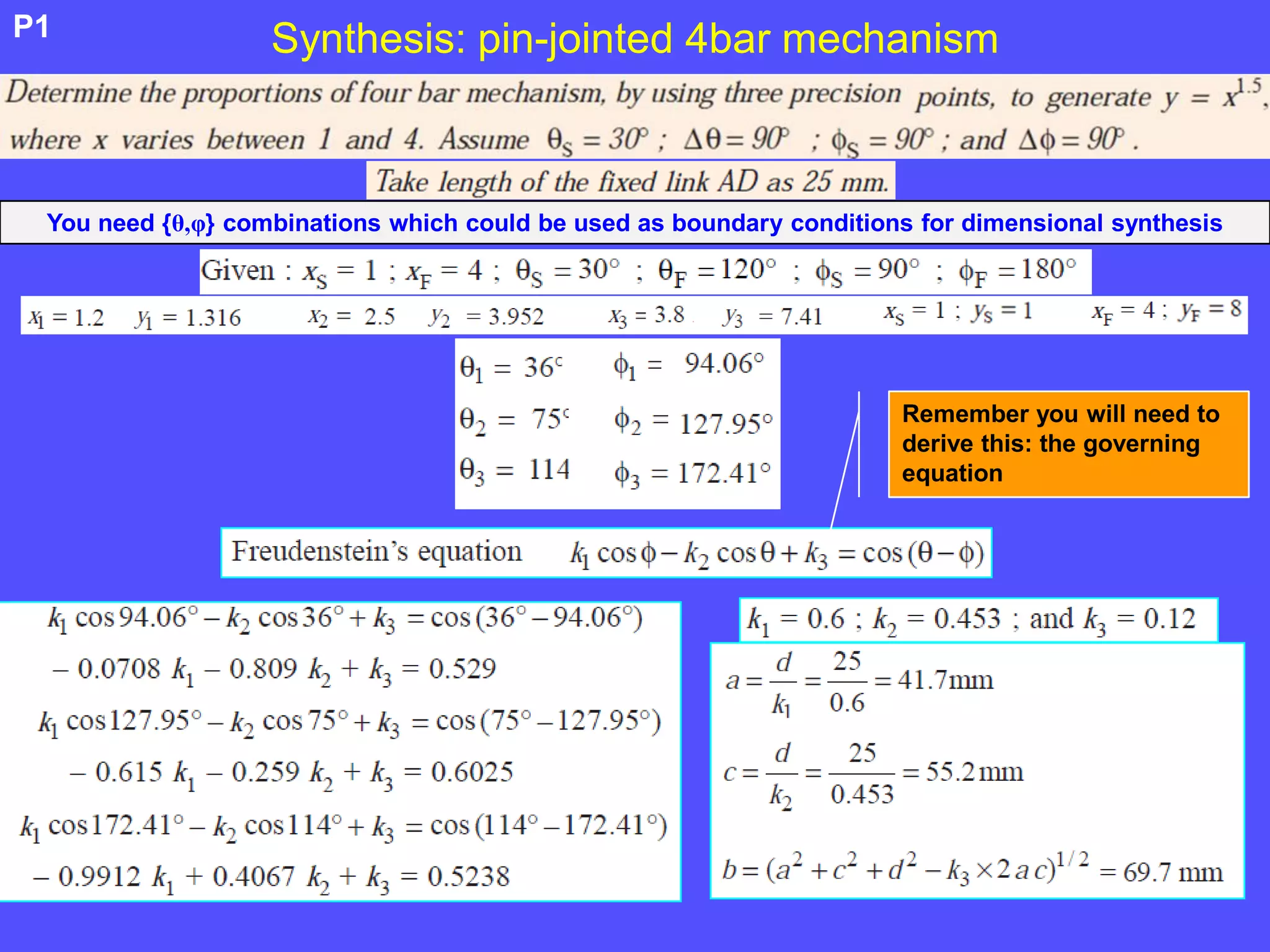
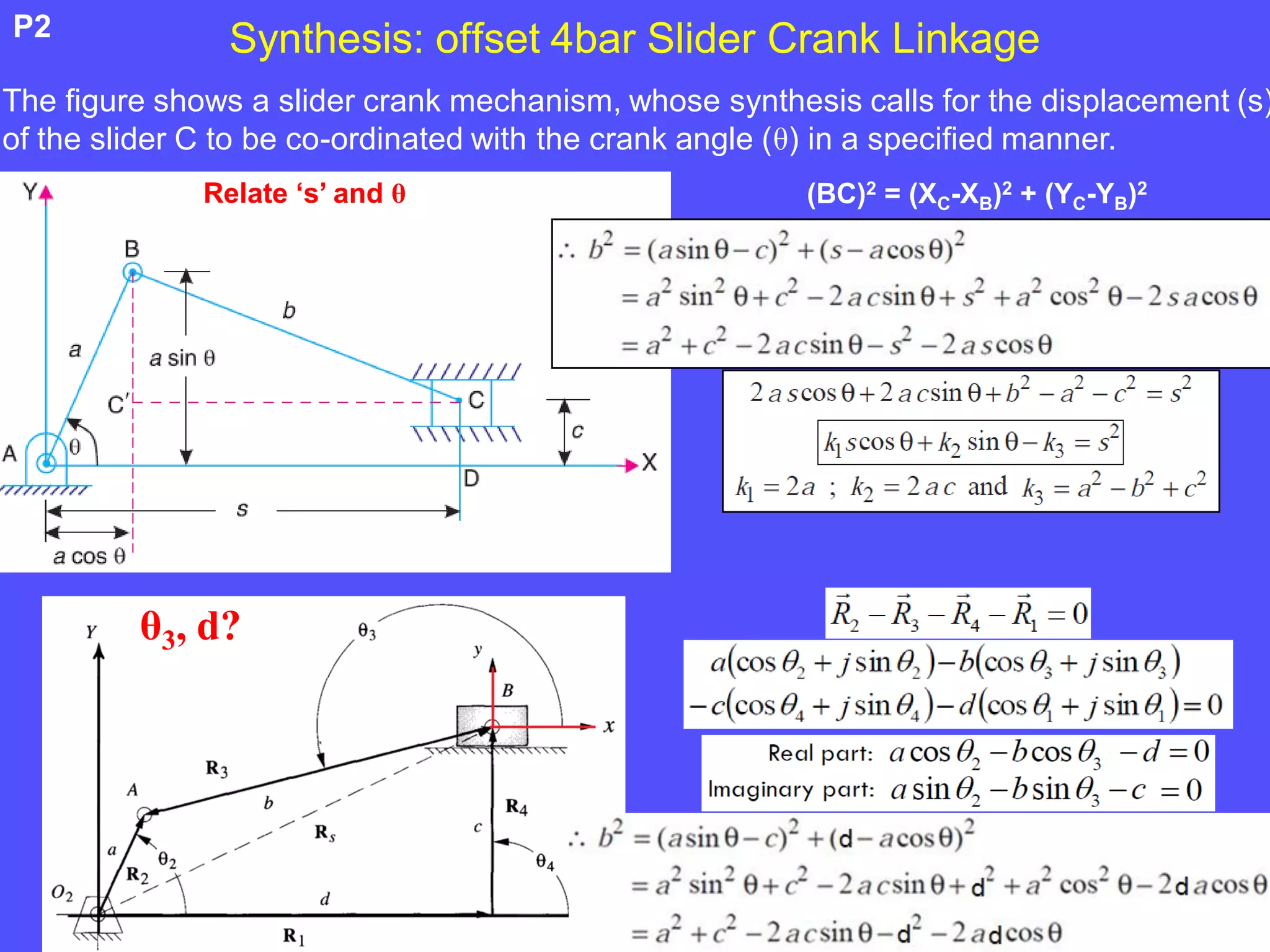
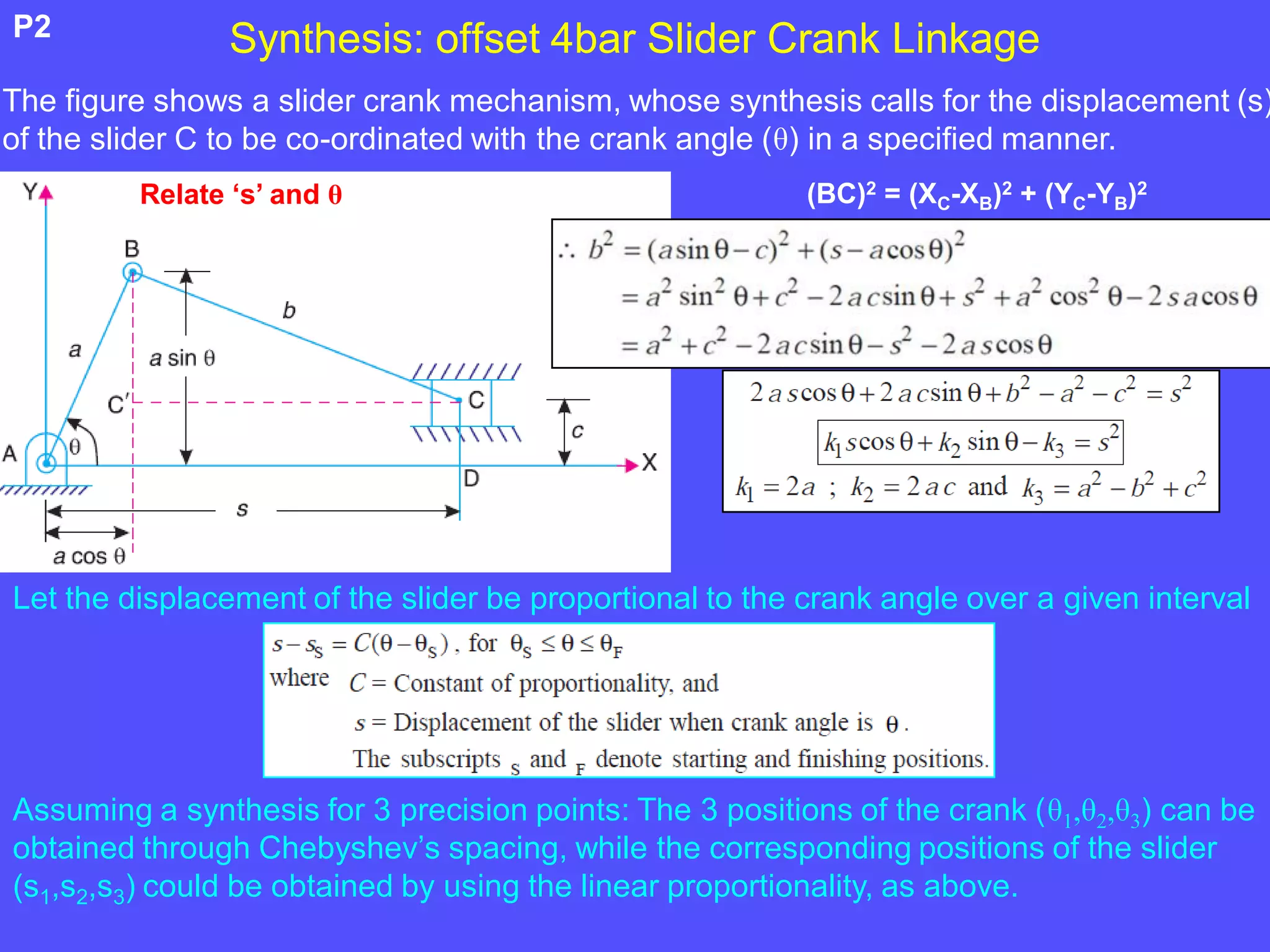
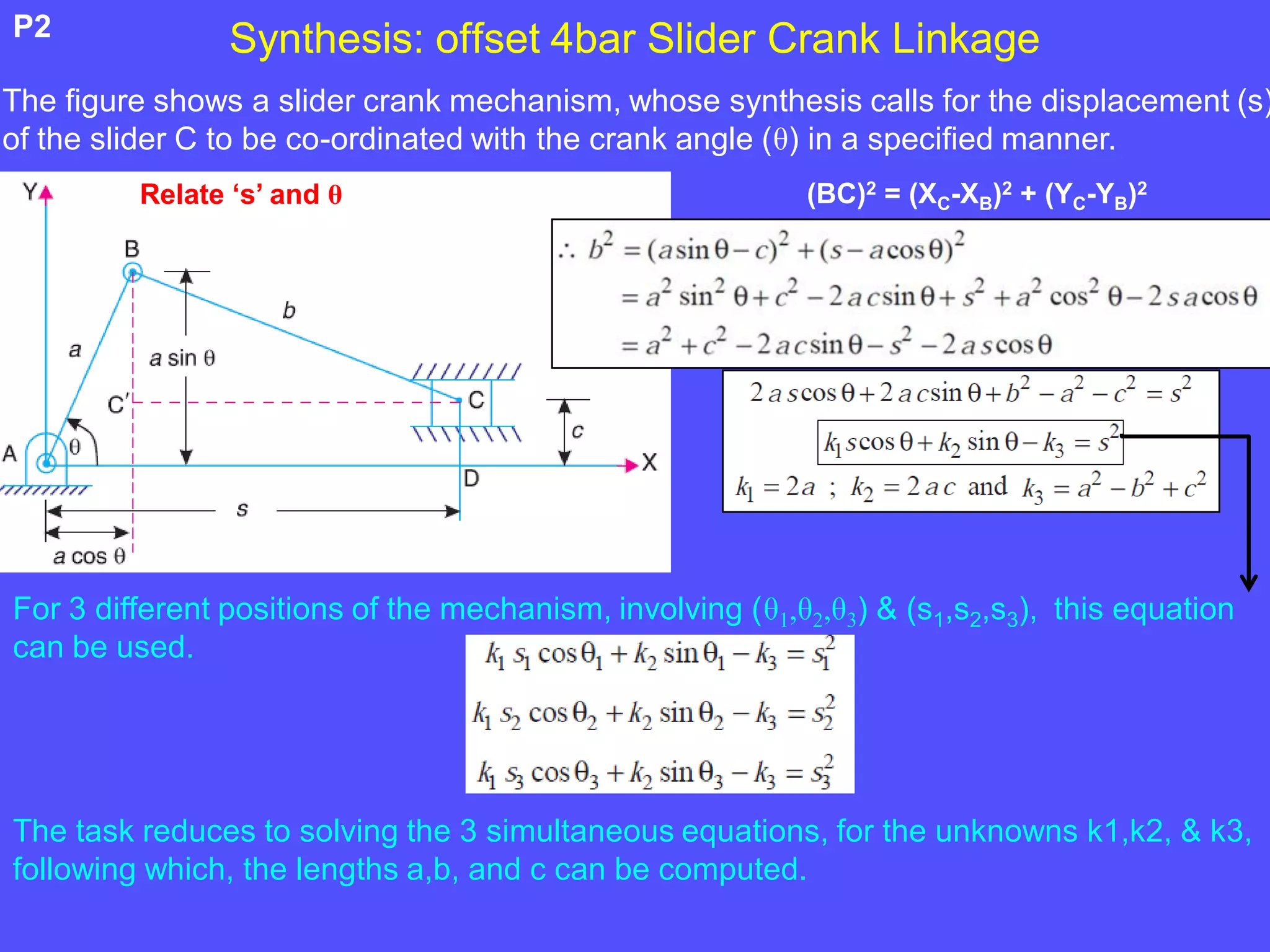

Kinematics of machines can involve either analyzing an existing mechanism's motion or synthesizing a new mechanism to achieve a desired motion. Kinematic synthesis involves selecting the type of mechanism, determining the number of links needed, and defining the link dimensions. Dimensional synthesis aims to develop link dimensions such that the mechanism's output motion matches the desired motion at select precision points, often spaced using Chebyshev's method to minimize error between points. Slider-crank mechanisms can be synthesized by relating the slider displacement to crank angle at precision points defined using Chebyshev spacing.












































![[IJET-V1I6P7] Authors: Galal Ali Hassaan](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i6p7-151213092439-thumbnail.jpg?width=640&height=640&fit=bounds)







































