The document provides an outline for a lecture on loop transfer functions, Nyquist plots, and stability analysis. Key points include:
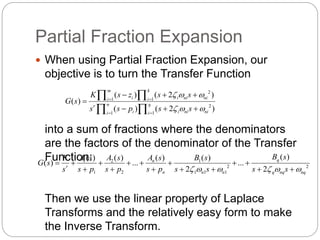
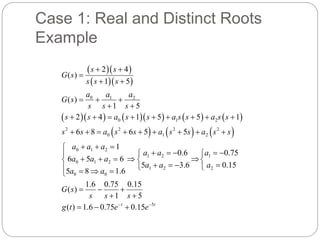
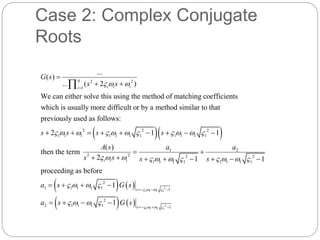
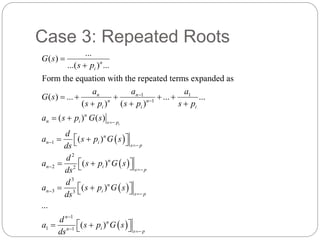
- Partial fraction expansion can be used to analyze transfer functions with real distinct roots, complex conjugate roots, and repeated roots.
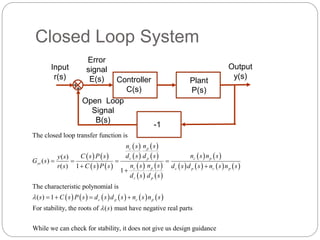
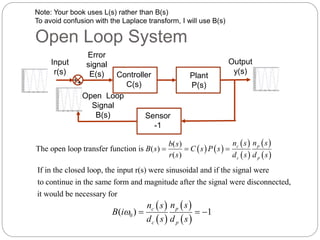
- Open and closed loop transfer functions are defined. The characteristic polynomial determines stability for closed loop systems.
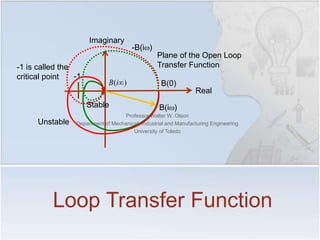
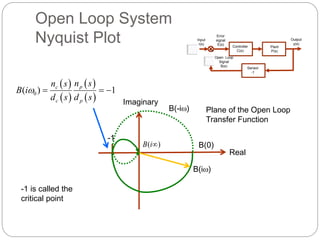
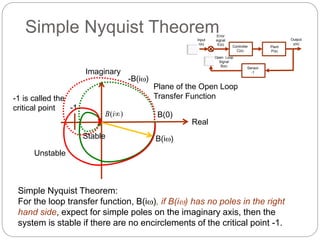
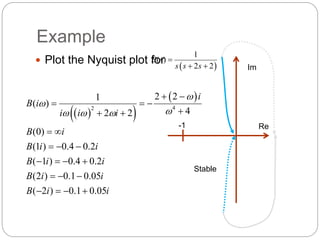
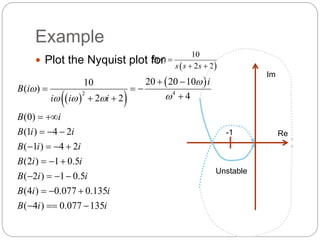
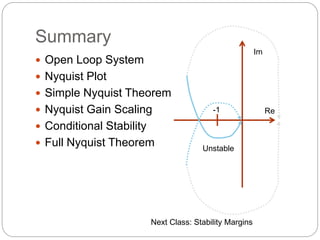
- Nyquist plots involve evaluating the open loop transfer function B(s) as it traces a closed contour in the complex plane. The Nyquist stability criterion uses properties of this contour.
- Heaviside expansion can be used to take the inverse Laplace transform of transfer functions with distinct poles.