Downloaded 115 times
















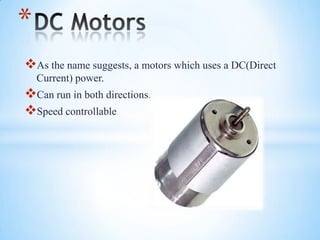






This document discusses robotics, including defining robots, types of robots, components of robots, and the future prospects of robotics. It defines a robot as a machine that performs tasks normally done by humans. There are many types of robots including mobile, stationary, remote controlled, and virtual robots. The main components of robots are its structure, power source, actuators, sensors, manipulators, and locomotion systems. The future of robotics is promising with potential applications in healthcare, education, industry, research, and household assistance. Scientists project that highly intelligent robots may surpass human levels of intelligence within the next decade.