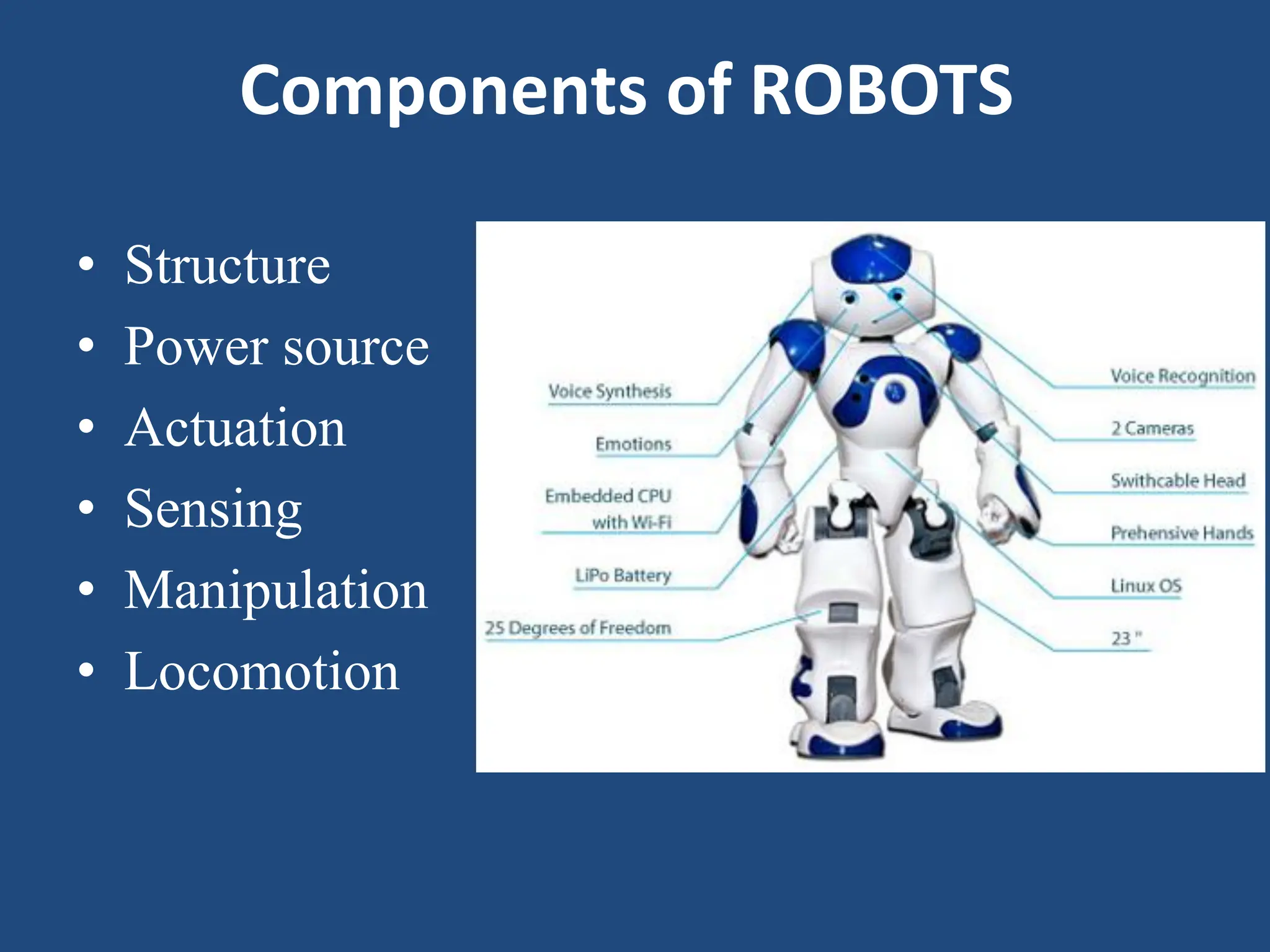
Robotics is the field of engineering that focuses on the design, construction, and use of robots. A robot is a machine that can sense its environment, process sensory information, and take actions to achieve tasks. The history of robotics began in the 1950s when the term "robot" was coined. Some key events include Isaac Asimov introducing the Three Laws of Robotics and Eric Elenberger being considered the father of modern robotics. There are several types of robots including mobile, rolling, walking, stationary, autonomous, and remote-controlled robots. The main components of robots include their structure, power source, actuation, sensing, manipulation, and locomotion abilities. Robotics provides many advantages such as speed, ability