Downloaded 34 times


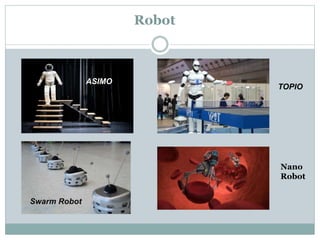
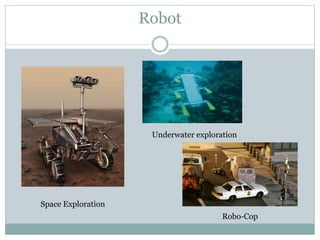





This document provides an introduction to robots and mechanical engineering. It defines robots and provides examples such as industrial robots, military robots, medical robots, and more. It discusses the history of robots and introduces the three laws of robotics. Overall, the document serves as a high-level overview of robots and their applications across different fields.
















































































