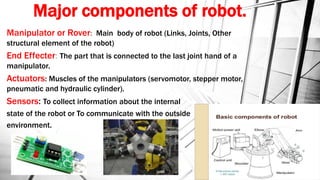
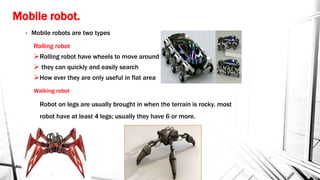
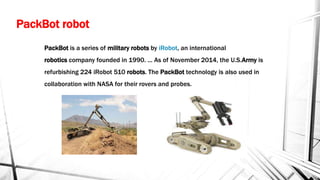
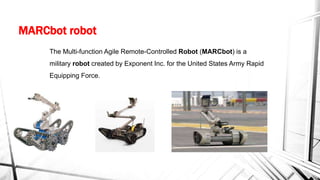
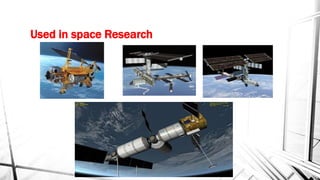
This document discusses robots and their applications. It begins with a definition of a robot as a re-programmable, multifunctional machine that can replace humans in hazardous work. It then provides a brief history of robots, including the origin of the term "robotics" and Isaac Asimov's Three Laws of Robotics. The document outlines the major components of robots and different types, including mobile, stationary, autonomous, and remote-controlled robots. It discusses several applications of robots, such as industrial uses like welding and painting, medical uses like robotic surgery, military uses like bomb disposal and defense systems, and their use in space research.