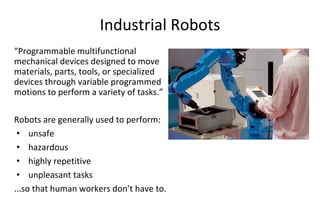
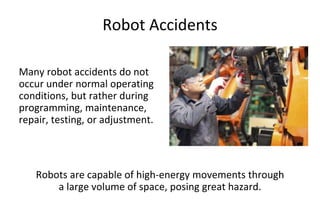
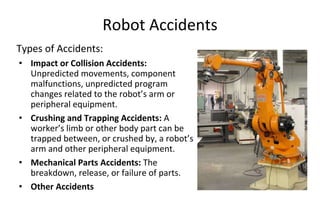
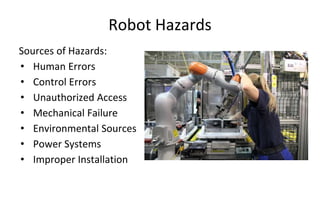
This document discusses robot safety and accidents. It provides examples of fatal robot accidents that occurred during maintenance or due to safety system failures. The types of robot accidents include impacts, crushing, trapping, and mechanical part failures. Sources of robot hazards are listed as human errors, control errors, unauthorized access, mechanical failures, and environmental factors. The document outlines various safeguarding methods for robot personnel, including risk assessment, safeguarding devices, awareness devices, restricting robot speed during programming, and safety training.