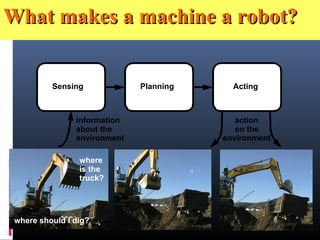
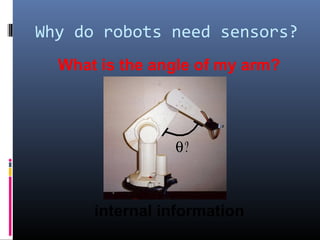
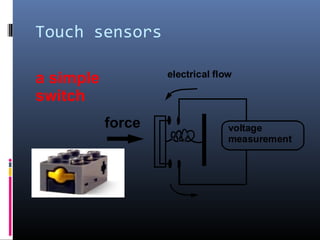
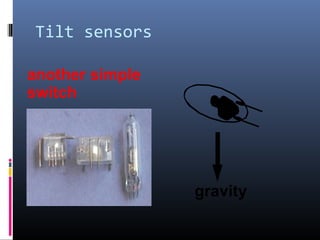
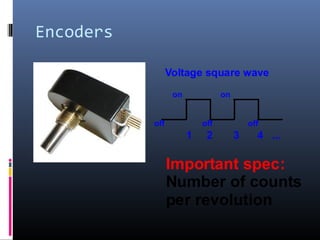
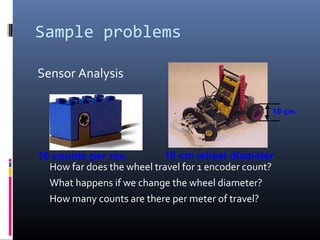
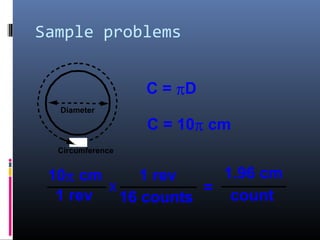
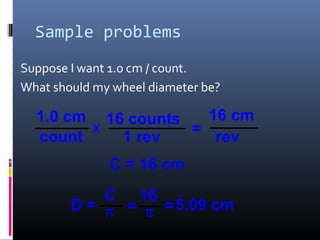
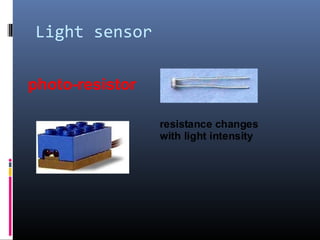
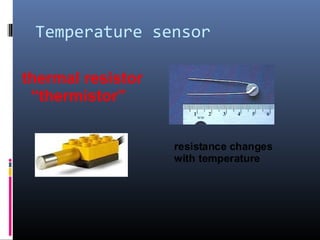
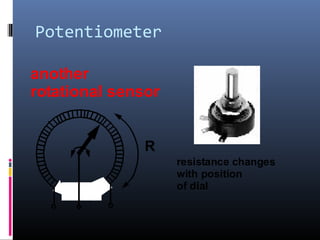
This document provides an overview of sensors for robotics applications. It discusses why robots need sensors to collect information about their environment through sensing, planning and acting. It describes different types of sensors categorized by their working mechanism, including active and passive sensors, exteroceptive and proprioceptive sensors, and sensors based on different mediums like electromagnetic radiation, sound, touch, and chemicals. Common sensors like encoders, tilt sensors, light sensors, temperature sensors, potentiometers, and cameras are presented with examples. The document concludes with questions about applying various sensors in robotics.