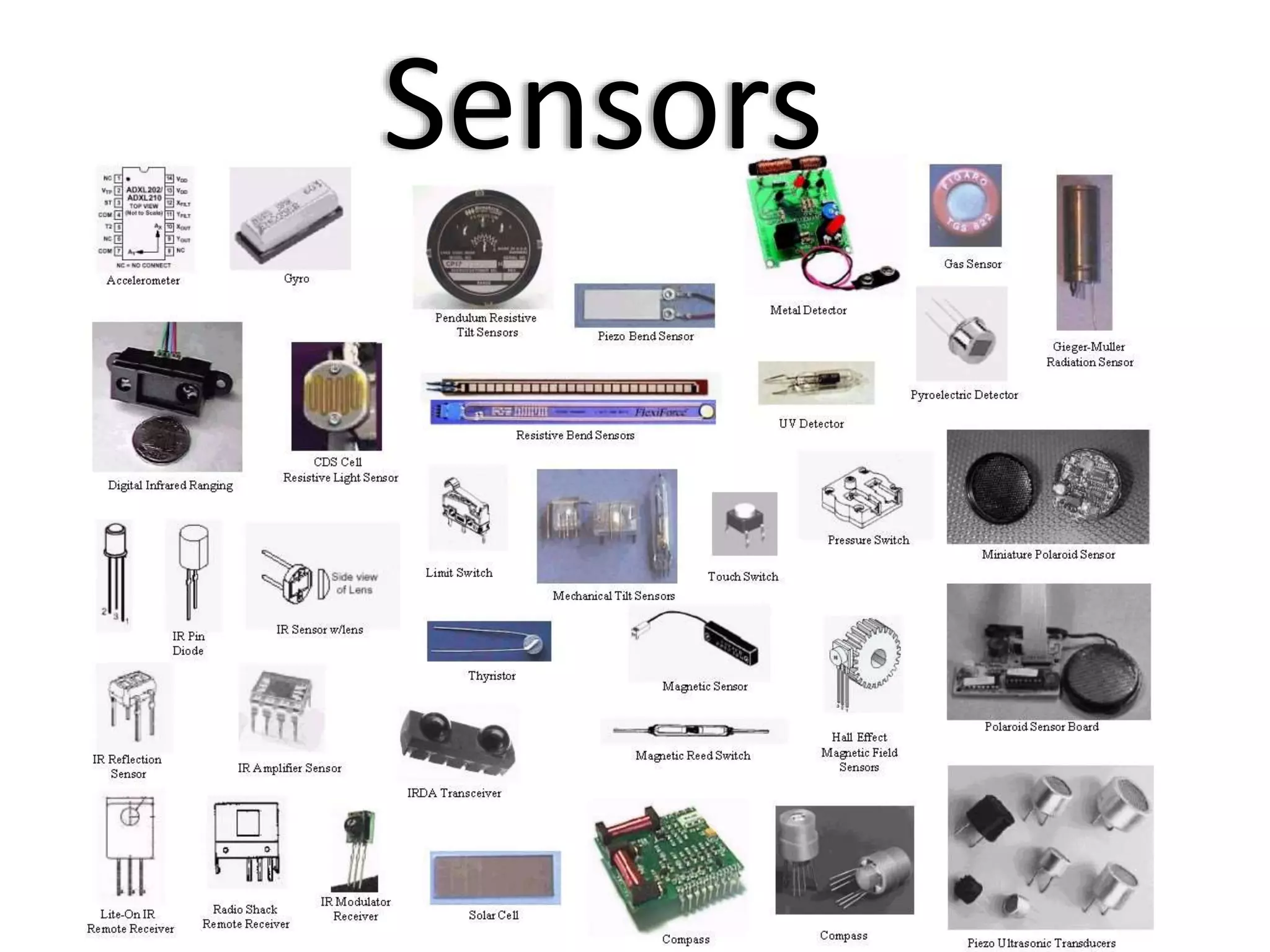
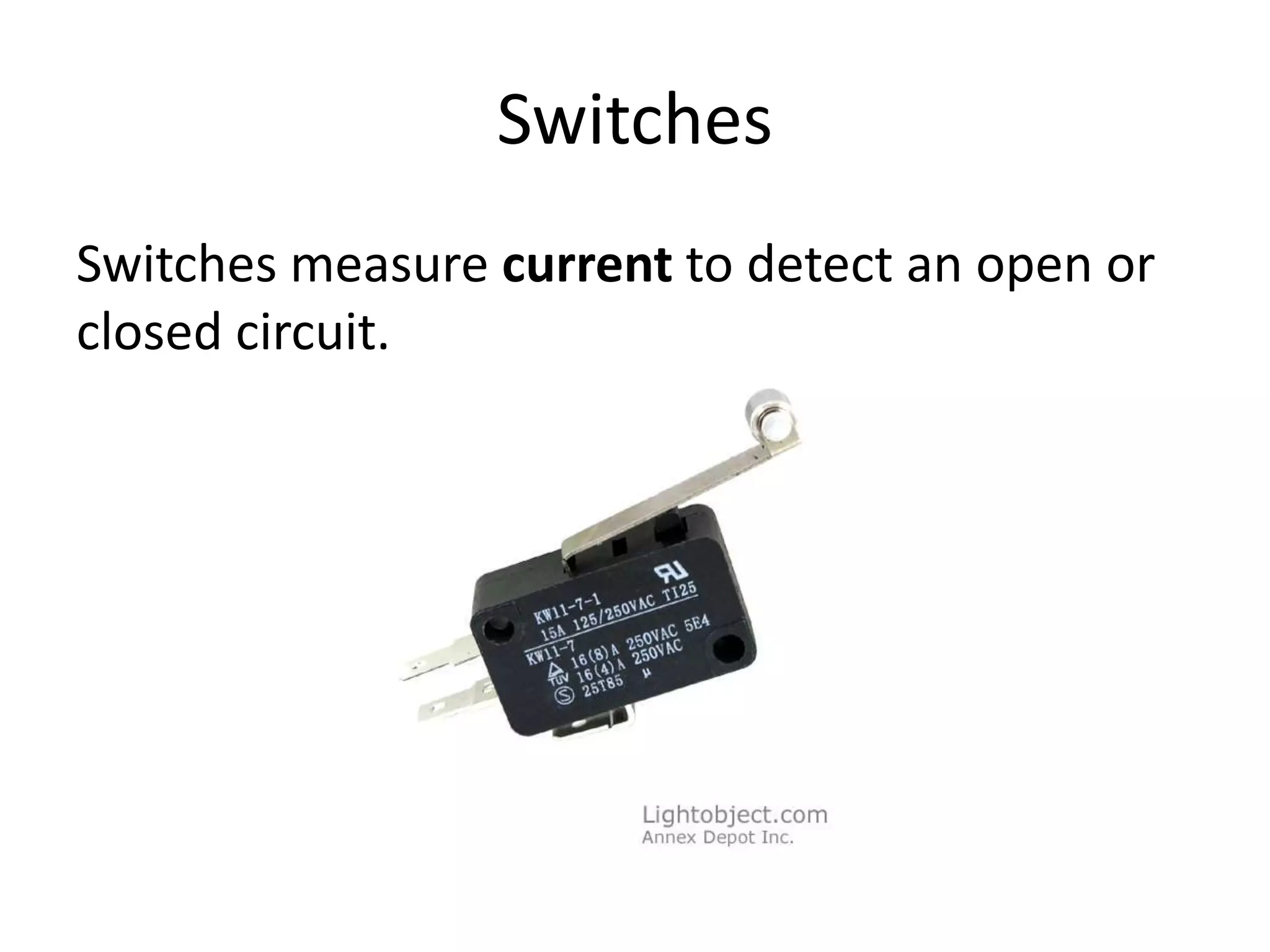
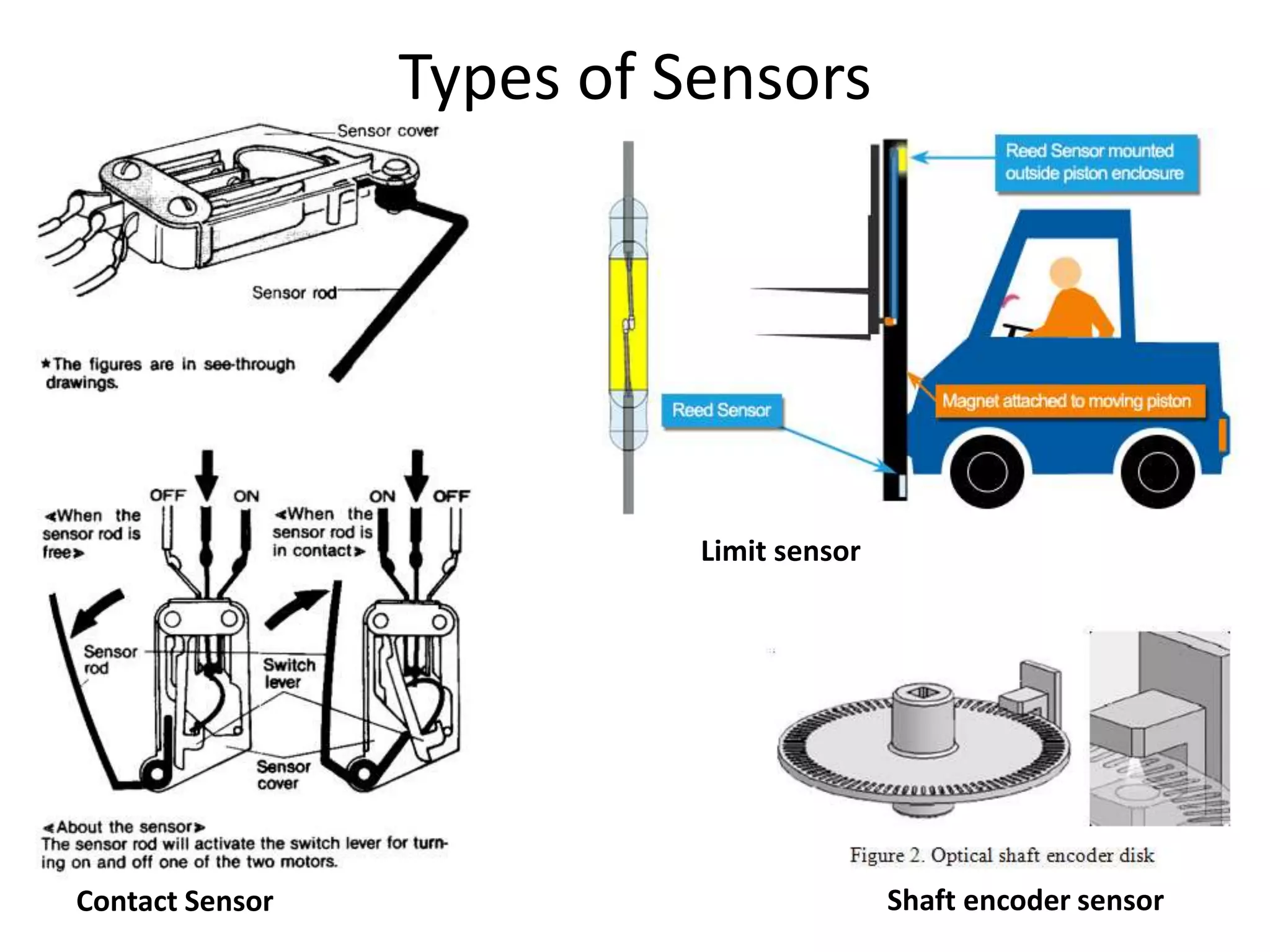
Sensors are physical devices that measure physical quantities like light, temperature, and pressure. They provide input to a robot's perceptual system, including internal proprioception and external exteroception. Sensors are subject to noise and errors due to inherent uncertainties in physical measurement. Sensors can be simple, like switches that detect open or closed circuits, or complex, requiring higher levels of processing like signal processing or computation to extract useful information. Examples include bump sensors, odometers, sonars, speech recognition, and computer vision. Sensor inputs allow robots to perceive the world and determine what actions to take.