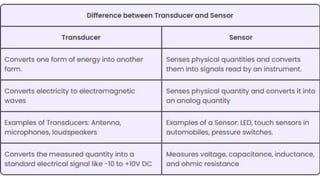
This document discusses sensors and transducers used in robotics. It describes desirable features of sensors such as accuracy, precision, operating range, speed of response, calibration, reliability, and cost. It then categorizes the main types of sensors used in robotics: tactile sensors, proximity and range sensors, miscellaneous sensors, and machine vision systems. Under tactile sensors, it describes touch and force sensors. It provides examples of proximity sensors like infrared sensors and describes how optical, acoustic, electrical, and other technologies can be used to design proximity and range sensors.